
旋转导向钻井工具信号下传系统研究*
2012-01-23 00:43李峰飞蒋世全李汉兴高德利
中国海上油气 2012年6期
李峰飞 蒋世全 李汉兴 高德利
(1.中海油研究总院; 2.中国石油大学(北京))
旋转导向钻井工具信号下传系统研究*
李峰飞1,2蒋世全1李汉兴1高德利2
(1.中海油研究总院; 2.中国石油大学(北京))
结合旋转导向钻井系统自身的特点,选择钻井液脉冲作为旋转导向钻井工具信号下传的方式,对信号下传系统钻井液压力脉冲的传播特性进行了深入研究;分析了各种钻井参数对钻井液压力脉冲幅值的影响,给出了钻井液压力脉冲的时间特性,并结合钻井液压力脉冲的传播特性和旋转导向钻井工具的自身特性设计了相适应的指令系统和编码方式。经现场试验验证,所研制的旋转导向钻井工具信号下传系统解码成功率高,能够满足旋转导向钻井的需要。
旋转导向钻井工具 信号下传 钻井液压力脉冲 传播特性 编码
自动化闭环钻井的概念源于20世纪80年代,而代表自动化闭环钻井最高水平的旋转导向钻井系统面世于20世纪90年代[1-2]。因旋转导向钻井系统具有井眼净化效果好、井身轨迹控制精确、位移延伸能力强等优点,在钻超深井、高难定向井、丛式井、分支井等特殊工艺井中得到了广泛的应用[3-4]。国外各大石油服务公司大都研制了自己的旋转导向钻井系统,并投入商业应用获取了巨大经济效益。国内以中国海油为首的很多单位也进行了相关研究,但总体和国外仍有较大差距[5-6]。
旋转导向钻井系统是通过“测、传、导”功能,引导控制钻头钻入预期目标地层的智能化钻井系统,一般由测量系统、通讯(传输)系统、导向机构等几部分组成。信号下传系统承担地面控制指令向下传输至井底导向工具的工作,是旋转导向钻井系统必不可少的组成部分[6-8]。国外投入商业运营的旋转导向钻井系统均配备成熟的信号下传系统,部分公司的信号下传系统形成了单独的商业运营系统,目前国内针对旋转导向信号下传系统的研究不多,且和国外有较大差距。中海油研究总院经过多年努力研制了具有自主知识产权的旋转导向钻井系统并进行了大量的现场试验,突破了包括信号下传在内的多项关键技术,取得了初步成功。本文结合中海油研究总院牵头研制的旋转导向钻井工具,对其信号下传系统进行相应分析研究。
1 信号下传系统基本原理
信号下传系统用于建立地面系统与井下系统的通讯通道,其应该满足以下基本要求[9-10]:
①完成地面控制命令的下传和井下准确接收;
②不影响正常的钻井作业;
③系统具有很高的准确性、稳定性和可靠性。
由于钻井作业的特殊性,传统的通讯方式很难在钻井环境中得以应用。分析认为,用于钻井系统信号下传系统的传播途径主要有电缆、智能钻杆、光纤、电磁波、声波、钻柱转动、钻井液脉冲等,各种传输方式的基本特性见表1。
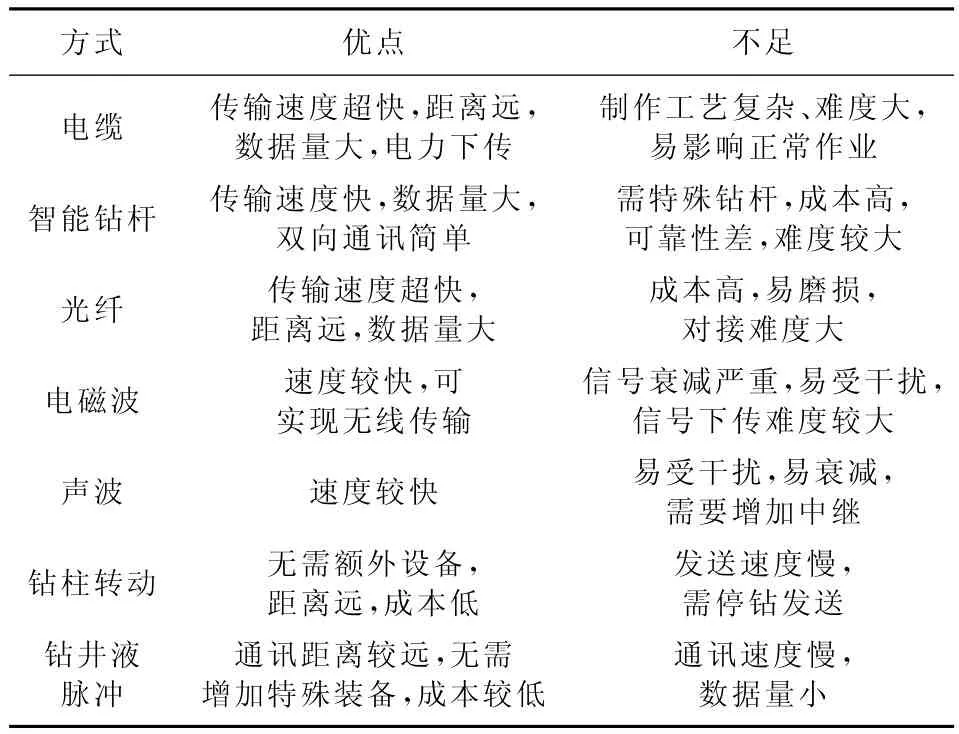
表1 钻井系统信号下传方式比较
对于旋转导向钻井系统而言,其主要用于发送地面控制指令,数据量相对较小,同时对于通讯速度要求并不十分严格。结合旋转导向钻井系统自身特性,综合考虑可靠性、经济性、现场作业可操作性等几个方面的要求,选择钻井液脉冲作为其信号下传方式。
旋转导向钻井信号下传系统基本原理如图1所示。地面钻井液泄流通道的“开”或“关”,可以控制钻柱内钻井液流量的变化,进而在井底产生相应的压力变化,即钻井液压力脉冲。地面按照一定顺序控制泄流装置产生钻井液压力脉冲(编码),井下旋转导向钻井系统检测钻柱内压力的变化并按照一定的规则进行相应的解析(解码),则可以完成地面控制命令的发送和井下接收。
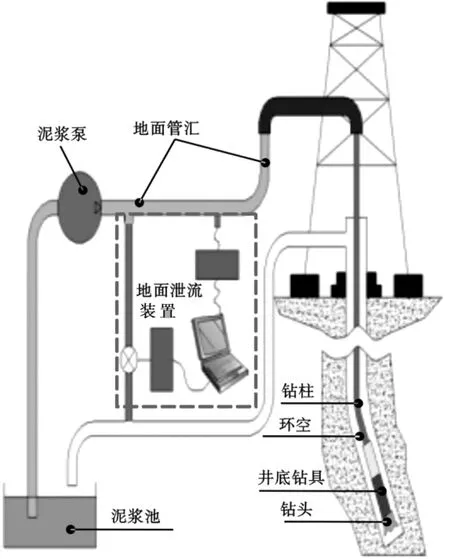
图1 旋转导向钻井工具信号下传系统原理框图
2 钻井液压力脉冲传播特性研究
2.1 信号下传系统模型建立
如图1所示,系统钻井液的循环通道可以分为循环通道和泄流通道2个部分:当地面泄流装置关闭时,钻井液沿循环通道正常循环;当地面泄流装置打开后时,钻井液除沿循环通道流动外,部分钻井液将沿泄流通道直接返回泥浆池,进而完成钻井液脉冲的发送。旋转导向钻井液循环系统可简化成图2所示框图。
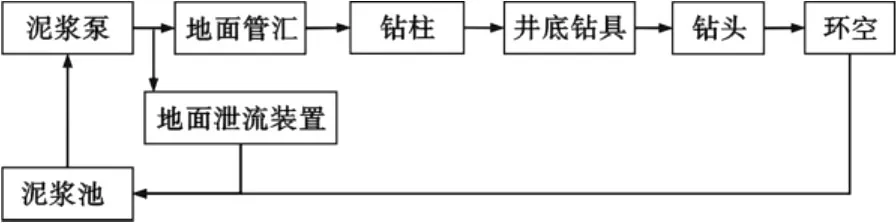
图2 旋转导向钻井工具钻井液循环系统框图
如图2所示,钻井液在主循环回路中流动的压力损耗主要由管内流、钻头、环空流几部分组成,可分别用以下各式计算:
管内流压耗

环空流压耗

钻头压耗

式(1)~(3)中:Q 为钻井液流量;ρ为钻井液密度;L为钻柱总长;dh为井眼直径;D为钻柱外径;d为钻柱内径;c为喷嘴水力系数;A0为喷嘴出口截面积;f为摩阻系数。
对于钻井液在地面管汇(高压管线、立管、水龙带、水龙头)、钻杆、钻铤、接头等压耗,可以用式(1)近似计算;对于钻井液循环的各部分压耗,均可以用下式近似计算:

式(4)中,k为钻井液循环的各部分的等效水力系数。
根据柱塞式泥浆泵的特性可以将其等效为一恒流源,图2所示框图可以进一步转化为图3所示模型图,其中kcl、kp、kbha、kb、ka、kbp分别为地面管汇、钻柱、井底钻具、钻头、环空、地面泄流装置的简化水力系数。设系统正常流量为Q0,泄流后主循环通道流量为Q1,泄流通道流量为Q2,泄流后主循环通道的压耗为pm,泄流通道的压耗为pbp,则有如下关系:
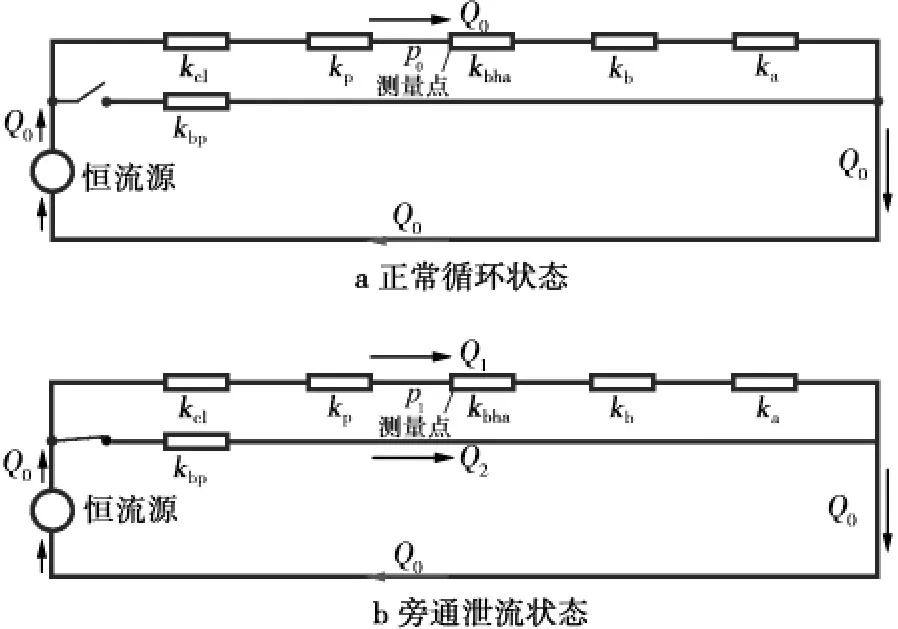
图3 旋转导向钻井工具信号下传系统模型图
2.2 钻井液压力脉冲幅值计算
钻井液压力脉冲依赖地面泄流产生,所以钻井液压力脉冲幅值也即测量点泄流前后的压力差值。设泄流前测量点的压力值为p0,泄流后的压力值为p1,钻井液压力脉冲幅值为pA,由图3再结合式(4)则有

根据式(6)

结合式(5)、(7)、(8),简化后可得

对于式(9)而言,钻井液流量Q0为已知量,kcl、kp、kb、ka均可通过相应的公式计算获得,kbha、kbp分别代表内部结构复杂的地面泄流装置和旋转导向钻井工具自身的等效水力系数,为避免计算误差,在实际工程中通过试验测量计算获得,这样便可以获得钻井液压力脉冲幅值。
以天津塘沽某试验井为例,钻井液密度为1.08 g/cm3;粘度3.1 mPa·s,使用φ215.9 mmPDC 钻头,喷嘴组合为3个8.73 mm和2个12.7 mm,泥浆泵排量为31.13 L/s,在井深800 m处通过信号下传系统发送钻井液压力脉冲序列。经理论计算,钻井液压力脉冲幅值为3.8 MPa;井下系统记录保存压力数据,提钻后进行实测值与计算值对比,其结果分析见表2。由表2可以看出,理论计算获得的钻井液压力脉冲幅值和实测钻井液压力脉冲幅值吻合较好,误差在±5%以内。
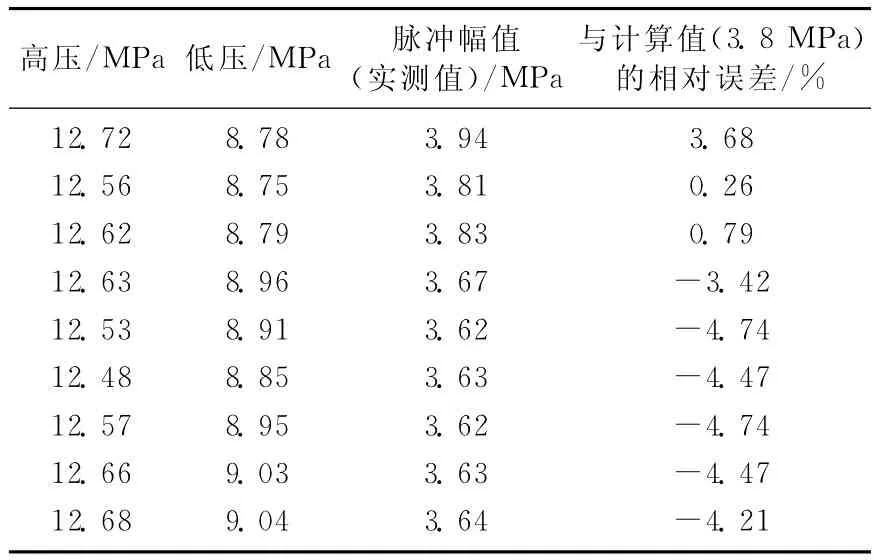
表2 某试验井钻井液压力脉冲幅值对比结果
结合式(1)~(9),在假设其他因素不变的情况下,对实际钻井过程中各参数对钻井液压力脉冲幅值的影响进行了相应的定性分析(表3)。
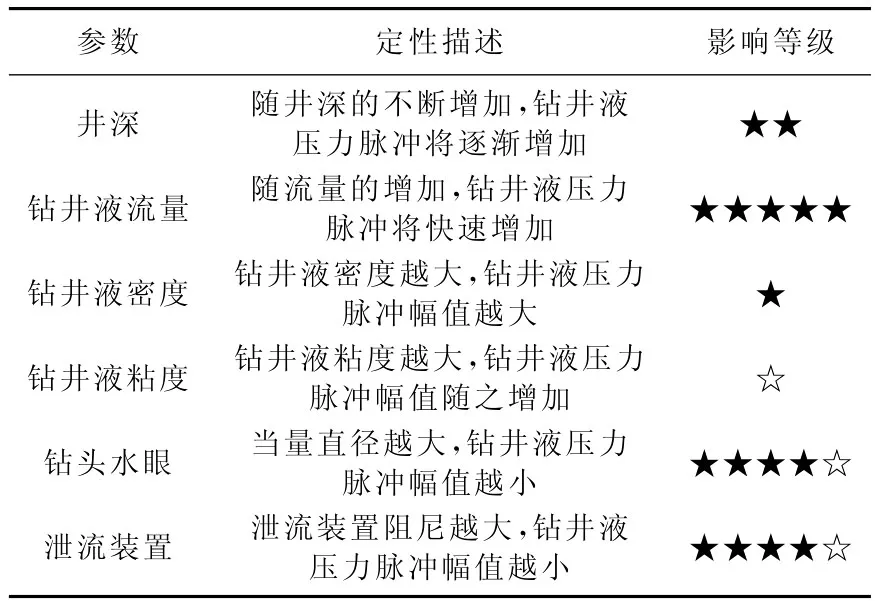
表3 实际钻井过程中各参数对钻井液压力脉冲幅值的影响
2.3 钻井液压力脉冲的频率特性
控制地面泄流装置泄流阀的“开”、“关”在井下形成钻井液压力脉冲,因此钻井液压力脉冲的时间特性和泄流阀的“开”、“关”动作直接相关,钻井液压力脉冲的整体时间特性和地面控制动作相一致。
实际应用中,由于钻井液自身的特性,钻井液压力脉冲不可能发生压力的突然变化,从高到低和从低到高的变化均需要一个过程。某试验井泄流阀“开”、“关”形成的钻井液压力脉冲波形图见图4,可见该井钻井液压力脉冲波形呈指数变化[11-12]。一个完整的钻井液压力脉冲将由4个区域组成:下降区(A~B)、低压稳定区(B~C)、上升区(C~D)、高压稳定区(D~E),其中A~C对应泄流阀持续打开时间,C~E对应泄流阀持续关闭时间。
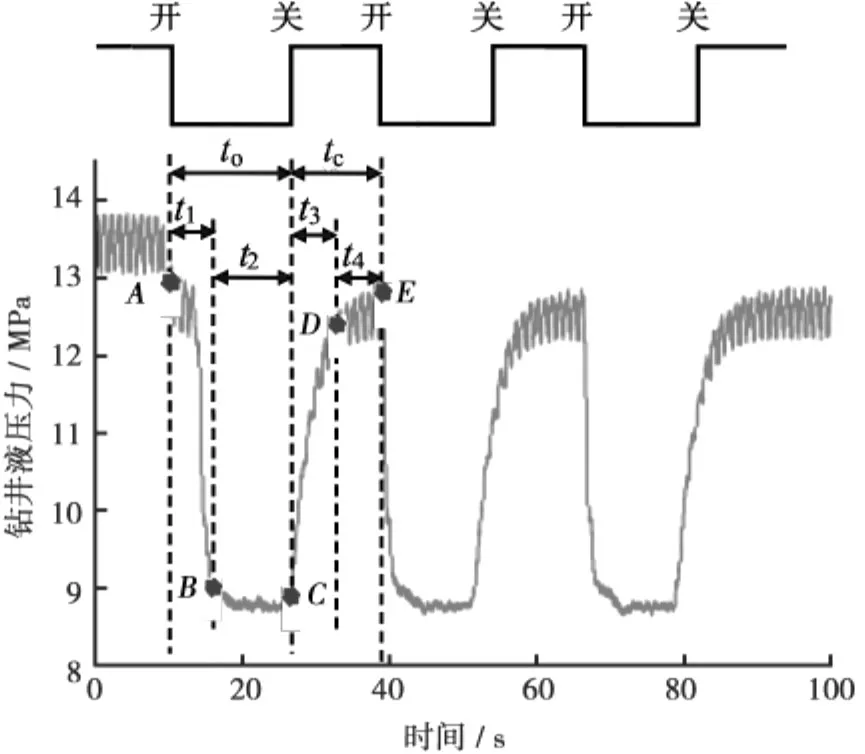
图4 某试验井泄流阀“开”、“关”形成的钻井液压力脉冲
2.3.1 钻井液压力脉冲下降沿及上升沿时间测量
对于钻井液压力脉冲而言,其波形呈指数变化,其变化的时间和钻井液的密度、粘度、压缩系数、井身结构、钻具组合、泄流量、泥浆泵性能等一系列物理量相关。由于其涉及变量太多,理论计算可能造成较大的误差,为了对钻井液压力脉冲的时间特性有更好的了解,可以在井场对钻井液压力脉冲的时间特性进行相应的测量。
当旋转导向工具钻具下至井底后,通过安装在立管处的压力传感器进行钻井液压力脉冲下降沿及上升沿时间的测量,具体测量步骤如下:①钻具下至井底后开泵,调整泵冲至正常钻进作业需要的泵冲;②泵压稳定后,记录立管压力;③打开地面泄流装置进行泄流,同时启动秒表;④当立管泵压再次稳定后,停止秒表,则获得钻井液压力脉冲下降沿的时间;⑤清零秒表,准备关闭地面泄流装置;⑥关闭地面泄流装置,同时启动秒表;⑦当立管压力基本恢复至步骤②所记录的压力时,停止秒表,则获得钻井液压力脉冲上升沿的时间。
2.3.2 实测钻井液压力脉冲时间数据
仍以天津塘沽某试验井为例,结合所研制的地面泄流装置对旋转导向工具在井口和井下进行了大量试验,测得了大量的钻井液压力脉冲下降沿和上升沿数据,绘制了其下降沿和上升沿时间特性曲线(图5)。从图5可以看出,该井钻井液压力脉冲下降沿一般在5 s以内;上升沿在10 s以内,下降沿较上升沿快。为避免干扰,给钻井液压力脉冲以充分的下降和恢复时间,在地面控制钻井液压力脉冲的发送中,采用开泄流阀10 s、关泄流阀15 s的时序来完成一个完整钻井液压力脉冲的发送。
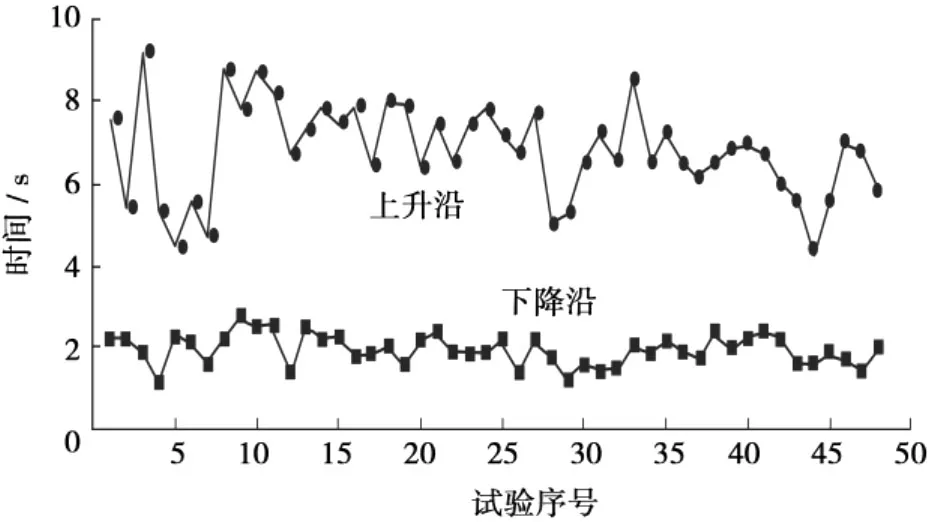
图5 某试验井钻井液压力脉冲下降沿和上升沿时间特性曲线
3 信号下传系统指令系统与信号编码方式设计
要实现地面指令的向下传输,不仅需要能在井底产生钻井液压力脉冲,同时井下工具必须能从识别出的钻井液压力脉冲中解析出相应的控制指令,因此必须按照一定的规律或时间顺序来进行钻井液压力脉冲的发送,即必须对信号进行相应的编码。对于旋转导向钻井工具的信号下传系统而言,编码必须遵循准确性、时效性、可行性(易于实现)的原则。
3.1 指令系统设计
旋转导向钻井信号下传系统指令系统主要用于控制导向工具实现稳斜、导向(增斜、降斜、增方位、降方位)等功能。结合旋转导向钻井工具自身的特性,所设计的信号下传系统指令系统见图6,对应井眼截面0°~360°范围,每30°设计1个指令,共12个指令;同时设计1个稳斜指令(KD)、1个停止指令(ST)和2个备用指令。旋转导向钻井工具信号下传系统共设计信号下传指令16个。
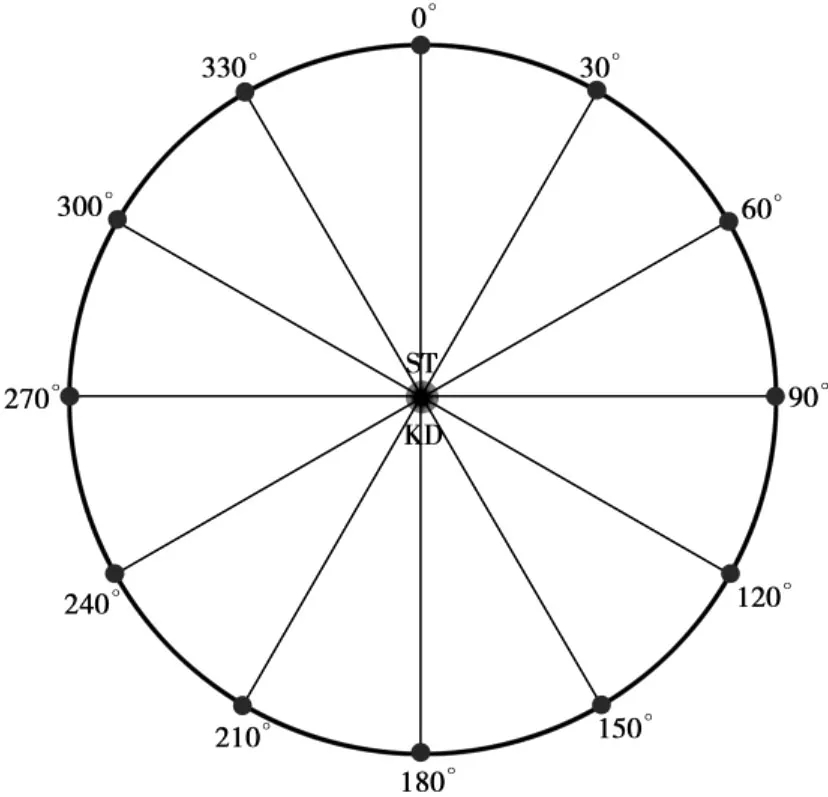
图6 旋转导向钻井信号下传系统指令系统图
3.2 信号编码方式设计
对于钻井液压力脉冲而言,其下降沿出现的速度要较上升沿快且易于识别,所以旋转导向钻井工具信号下传系统设定以下降沿作为信号编码的信源;同时,为了更好地接收和识别钻井液压力脉冲信号,在每个脉冲后需要有一定的恢复时间,即在发送一个脉冲后需要等待一个恢复周期才能进行下一个脉冲的发送。如果采用脉冲的有无表达数字信号的“0”、“1”,则传输过程中需要频繁地开关地面泄流装置,对系统影响较大。为尽量简化操作,同时使系统具有数字编码的抗干扰、容错等能力,设计了以4个脉冲来进行信息传输的编码方式,将整个命令划分为4个区域(图7),其中每个区域以一个完整的脉冲作为起始信号,每个区域的时间均由脉冲下降时间(TD)、脉冲恢复时间(TU)、命令时间(T1、T2、T3)等3个部分组成,命令时间可以为0,第3命令区作为校验区且采用偶校验。
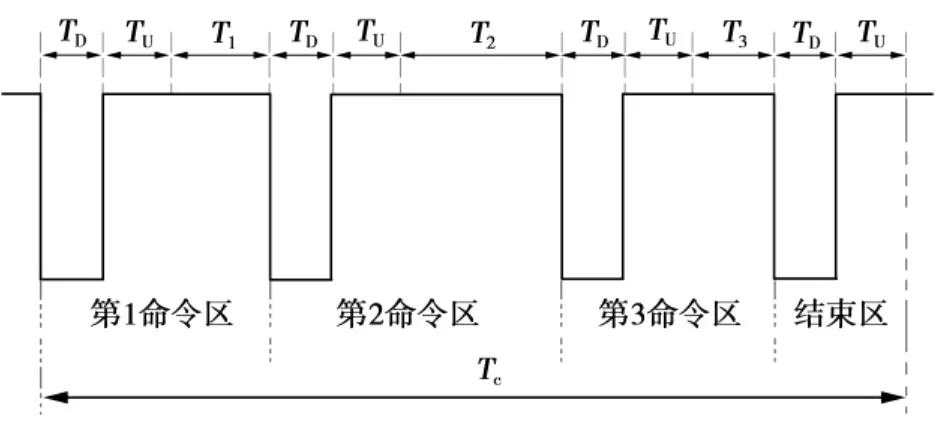
图7 旋转导向钻井工具信号下传系统信号编码方式
根据本文前述,在此取TD=10 s,TU=15 s,对命令时间做如下定义:
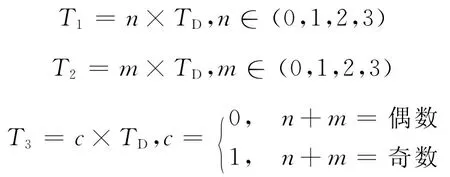
其中n、m、c分别表示命令时间T1、T2、T3的区分参数。第1、2命令区,命令时间区分参数n、m和实际命令对照如表4,第3命令区命令时间区分参数c按照判定原则由n、m共同决定。
由图7所示,单个命令持续时间Tc=4×(TD+TU)+T1+T2+T3=(4+n+m+c)×TD+4×TU。例如,当要向120°方向导向钻进时,据表4取n=2、m=1,此时c=1,整个命令发送持续时间140 s。
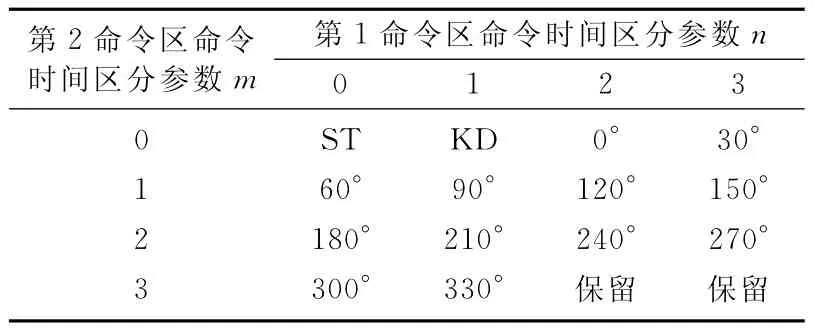
表4 旋转导向钻井工具信号下传系统各命令时间对应指令
4 现场试验
根据旋转导向钻井工具现场试验要求,信号下传系统配合旋转导向钻井工具在天津塘沽、长庆、四川等试验现场完成了10余井次的信号下传作业,均取得了理想结果。2012年3月,旋转导向钻井工具在天津塘沽JJSY-4井进行了现场试验。在试验中根据旋转导向钻井工具实际作业需要,按照所设计信号下传指令编码方法累积发送信号下传指令15个,其中0°导向指令(增斜指令)9个、稳斜指令(KD)1个、停止指令(ST)5个,完成一个指令的发送一般需要2~3 min,这与国外投入商业应用的旋转导向钻井工具信号下传系统相近。作业结束提钻后对旋转导向内部测量保存数据进行了分析,试验中正确执行信号下传指令共14个,未能正确执行的1个信号下传指令是由于地面发送时序错误导致,这说明本文所研制的旋转导向钻井工具信号下传系统解码准确率接近100%,可以满足旋转导向钻井的需要。
5 结束语
研究结果表明,根据旋转导向钻井系统的自身特性综合考虑可靠性、经济性、现场作业可操作性等要求,选用钻井液脉冲作为旋转导向钻井工具信号下传方式是可行的,现场试验表明,本文研制的信号下传系统解码成功率高,可以成功应用于旋转导向钻井系统。由于受泄流装置以及钻井液通道自身特性的限制,本文研制的旋转导向钻井工具信号下传系统要求地面泄流的速率不能太高,完成一个指令的发送一般需要2~3 min的时间,但这与国外投入商业应用的旋转导向钻井工具信号下传系统相近。
需要指出的是,当指令系统较为复杂时,需要对旋转导向钻井工具信号下传系统进行相应的扩展。同时,目前所研制的信号下传系统的配套系统仍有所欠缺,需要进一步完善与优化。
[1] 赵金海,唐代绪,朱全塔,等.国外典型的旋转导向钻井系统[J].国外油田工程,2002,18(11):33-36.
[2] 肖仕红,梁政.旋转导向钻井技术发展现状及展望[J].石油机械,2006,34(4):66-70.
[3] 李汉兴,姜伟,蒋世全,等.可控偏心器旋转导向钻井工具偏心位移控制分析[J].中国海上油气,2008,20(3):184-188.
[4] 姜伟.旋转导向偏心稳定器井壁推靠力力学特性及影响因素研究[J].中国海上油气,2010,22(6):397-402.
[5] 张绍槐.现代导向钻井技术的新进展及发展方向[J].石油学报,2003,24(3):88-93.
[6] 姜伟.旋转导向带挠性接头变刚度钻具组合的弹性稳定性分析[J].中国海上油气,2007,19(5):330-334.
[7] 刘修缮,苏义脑.井眼轨迹闭环控制系统的信号下传技术[J].钻采工艺,2000,21(6):88-93.
[8] 刘修缮,苏义脑.地面信号下传系统的方案设计[J].石油学报,2000,21(6):88-93.
[9] 李峰飞,蒋国盛,卢春华,等.泥浆压力脉冲在孔底电动冲击器中的应用[J].地质科技情报,2010,29(5):131-133.
[10] ZHOU Jing,FU Xingsheng,SHANG Haiyan,et al.A method to realize the surface-to-downhole communication while drilling[C].IADC/SPE 59268.
[11] 孙东奎,董绍华.钻井液正脉冲井底信号传输系统分析[J].石油机械,2007,35(11):49-51.
[12] 孙东奎,董绍华.钻井液水力通信通道传输信号的时频特性分析[J].石油机械,2008,36(4):42-44.
Study on downward signaling system of rotary steerable drilling tool
Li Fengfei1,2Jiang Shiquan1Li Hanxing1Gao Deli2
(1.CNOOC Research Institute,Beijing,100027;2.China University of Petroleum,Beijing,102249)
Combined with the characteristics of rotary steerable drilling system,the drilling fluid pressure pulse was taken as the downward signaling mode of the rotary steerable drilling tool and the deep study was carried out on the transmission characteristics of the drilling fluid pressure pulses in the system.The influences of various drilling parameters no the pulse amplitude were analyzed and the time characteristics of the pulses were obtained.Thereby the suitable command system and the coding method were designed combined with the transmission characteristics of drilling fluid pressure pulses and the characteristics of the rotary steerable drilling tool.The field test has demonstrated that the developed downward signaling system has high decoding rate and meet the needs of the rotary steerable drilling tool.
rotary steerable drilling tool;downward signaling;drilling fluid pressure pulse;propagation characteristic;coding
*国家高技术研究发展计划(863计划)“旋转导向钻井系统工程化技术研究(编号:2007AA090801)”部分研究成果。
李峰飞,男,2010年毕业于中国地质大学(武汉),获博士学位,现主要从事旋转导向钻井系统相关的研究工作。地址:北京市东城区东直门外小街6号海油大厦(邮编:100027)。电话:010-84525497。
2011-12-27改回日期:2012-02-21
(编辑:叶秋敏)
猜你喜欢
化工管理(2022年14期)2022-12-02
河南科技(2022年8期)2022-05-31
海洋石油(2021年3期)2021-11-05
学校教育研究(2020年11期)2020-06-08
钻井液与完井液(2019年4期)2019-10-10
钻井液与完井液(2019年4期)2019-10-10
钻井液与完井液(2019年4期)2019-10-10
小哥白尼(趣味科学)(2019年5期)2019-08-27
中国水运(2015年5期)2015-07-13
科技传播(2015年20期)2015-03-25
