Truss Spar平台在浮卸作业过程中结构强度分析
2012-01-08 04:59:42杨建民胡志强樊之夏孙伟英
海洋工程 2012年4期
杨 玥,杨建民,胡志强,樊之夏,孙伟英
(1.上海交通大学海洋工程国家重点实验室,上海 200240;2.海洋石油工程股份有限公司,天津 300452)
Truss Spar平台在浮卸作业过程中结构强度分析
杨 玥1,杨建民1,胡志强1,樊之夏2,孙伟英2
(1.上海交通大学海洋工程国家重点实验室,上海 200240;2.海洋石油工程股份有限公司,天津 300452)
在桁架式深吃水立柱式平台(Truss Spar)运输作业的浮卸过程中,半潜驳船不断压载下潜直到Truss Spar平台自浮后拖离驳船。针对浮卸作业的双浮体状态,提出Truss Spar平台在与半潜驳船发生接触情况下的载荷计算方案并进行结构应力水平评估。基于三维势流理论及SESAM软件,考虑平台及半潜驳船双浮体之间的水动力相互影响,首先对双浮体系统进行频域下求解,得到波浪诱导载荷;然后在时域下求解波浪中双浮体的运动方程及产生的接触力;最后将这两种载荷下的结构强度分析结果进行线性叠加,得到Truss Spar平台在波浪诱导载荷及接触力联合作用下结构应力水平。对比不同波浪方向及周期下的接触力结果,研究Spar平台结构整体应力水平及高应力区域位置特点,对总体强度水平进行评估。
桁架式深吃水立柱式平台;浮卸;多浮体系统;载荷求解;结构分析
随着深海油气田的开采,Spar平台作为一种新型深水生产平台,数量迅速增长并发展为三代,分别为传统型Spar平台(Classic Spar)、桁架式Spar平台(Truss Spar)以及多柱式Spar平台(Cell Spar)。其优越的性能和经济效益使研究Spar平台技术成为最具吸引力的方向之一[1-2]。
Spar平台安装前,需依次进行以下几个施工过程:拖拉装船(load-out)、驳运,即干拖(dry-tow)、浮卸(float-off)、湿拖(wet-tow)、扶正(upending)及上部模块的安装(float over)[3]。国内外一些学者对Spar平台运输过程的结构强度进行了相关研究和评估,Wang Jin系统地提出了Truss Spar平台在驳运过程的验证性分析[4];并且对Truss Spar平台在湿拖中的结构强度和疲劳问题进行了深入讨论[5]。Abraham M对Spar平台在驳运中的结构强度和屈曲性能提出了严密的评估方法[6]。
在上述各过程中,不论从Spar平台结构强度分析角度还是从施工难度及技术掌握水平来说,浮卸作业都相对较为困难。浮卸施工的主要过程为:解开固定于半潜驳船上的紧固装置与支架,将其固定于Spar平台;确保海况及环境条件在48小时内符合浮卸作业要求后,半潜驳船载着Spar平台压载下潜,此时半潜船和Spar平台可看作单浮体系统;当Spar平台自浮于水中后,驳船继续压载下潜一段距离,此阶段二者为双浮体系统;最后用拖轮将Spar平台从侧方拖离半潜船。浮卸作业时,两浮体的垂荡、纵摇以及横摇运动造成双浮体之间可能发生接触,接触力对两个浮体具有不可忽视的显著影响,这一阶段是浮卸作业中最危险的状态。在某些特殊情况下,例如海况突然恶化超出浮卸条件,双浮体之间的接触力增大,可能导致Spar平台结构破坏。因此,进行浮卸阶段Spar平台结构强度分析,掌握此过程强度分析方法,得到平台结构整体应力水平的数值解是有重要意义的。
以一墨西哥湾的典型Spar平台为研究对象,以半潜驳船为载体,针对Spar平台浮卸作业双浮体阶段提出载荷求解及结构强度分析的方案与流程。将浮卸过程所受载荷简化为两个独立部分,一为作用在整个Spar平台表面的波浪压力,即波浪诱导载荷,一为作用在平台局部的双浮体碰撞接触力;前者引起平台整体弯扭变形,后者影响平台局部应力分配。如何正确求解Spar平台受到的波浪力及双浮体碰撞接触力是这里研究的关键。在频域下计算得到作用在Spar平台的六自由度运动的响应幅值算子(RAO)及波浪诱导载荷,加载到结构有限元模型进行准静力分析;在时域下计算得到浮体的六自由度运动响应时历及碰撞接触力时历,将碰撞接触力施加在Spar平台对应位置进行静力计算;最后进行结果合并,得到Spar平台在浮卸作业双浮体阶段的结构强度结果;进行碰撞接触力关于波浪方向及频率的敏感性分析;对平台高应力区域进行比较,对浮卸作业中Spar平台的结构强度进行总结和评估。
1 计算方法介绍
1.1 计算流程
浮卸作业双浮体阶段,Spar平台完全依靠自己的浮力漂浮。在这一时刻,半潜船和Spar平台是两个浮体。在波浪载荷的作用下,两个浮体在垂荡、横摇及纵摇运动下可能发生碰撞接触,产生一定的碰撞接触力。无论半潜船还是Spar平台,都承受着两种载荷作用,一种是波浪诱导载荷作用,另一种是在某一时刻的碰撞接触力作用。文中对Spar平台分别加载这两种载荷进行结构强度计算。图1简要介绍了浮卸过程载荷求解及结构强度有限元分析的方案及流程。

图1 浮卸操作结构分析方法流程Fig.1 Guideline of the analysis approach during the float-off operation
载荷求解基于三维势流理论,首先对波浪中的多浮体系统进行频域下的水动力分析,考虑多浮体之间的水动力相互影响用边界元法进行波浪辐射势、绕射势求解、浮体运动求解及表面波浪压力积分,得到Spar平台及驳船的六自由度运动RAO及波浪诱导载荷RAO等水动力性能系数。得到这些参数后,一方面,将频域分析得到的水动压力、静水压力及六自由度运动惯性力传递到Spar平台结构有限元模型的表面节点以实现载荷加载,然后进行平台在波浪诱导载荷作用下的准静态总体结构强度计算,这一步骤称为总体强度分析;另一方面,以经典傅立叶变换方法进行频域向时域的转换,求解时域内的双浮体运动方程,得到Spar平台和半潜驳船的六自由度运动响应时历、支架接触力时历。以接触力垂向合力为标准,找到总力最大时刻的浮体相互接触力。将这组碰撞接触力作用在Spar平台与支架相接的对应位置处进行静力计算,得到两个浮体在接触力作用下的应力水平,这一步骤称为局部接触力强度分析。最后,将总体强度分析结果和局部接触力分析结果以线性叠加方法进行组合,即可得到Spar平台在浮卸作业双浮体阶段的结构强度分析结果,总结出主要高应力区域的应力水平,对这种作业方式条件下的结构强度安全性,做出一定评价。利用WADAM和SIMO软件完成频域和时域下的载荷求解,利用SESAM软件完成Spar结构有限元计算。
1.2 多浮体系统求解数值方法
Faltinsen,Michelsen,Van Oortmerssen[7],Loken[8],Duncan[9]基于三维势流理论对多浮体之间的水动力相互影响及运动响应的进行求解,Korsmeyer[10]在此基础上忽略自由表面效应得到了浮体之间碰撞接触力时历。Inoue,Islam[11]and Buchner[12]建立了多浮体数值计算模型并以用三维源汇分布法在频域及时域下求解水动力响应及多浮体间相对运动。基于三维势流理论建立多浮体运动方程,考虑多浮体系统间水动力相互影响并利用三维源汇分布法进行浮体表面动压力积分,在频域及时域下求解多浮体运动方程,得到浮卸作业双浮体阶段的载荷。
假定有M个浮体在波浪上在平衡位置附近作微幅简谐振荡运动,建立笛卡尔空间固定坐标系O-xyz,原点位于未扰动的自由水面,轴Oz垂直于平静水面向上。坐标系定义如图2。

图2 多浮体系统和空间固定坐标系Fig.2 Multi-body floating system and fixed coordinate system
对于一般的有限水深的情况,用斯托克斯(Stokes)摄动展开式求解三维势流理论下的多浮体完整边值问题。其中,一阶边值问题即为线性势流理论的边值问题:

即Sommerfeld辐射条件。
根据线性假定,可将速度势分解为入射势与绕射势和辐射势:

根据面元法数值求解得到总的速度势之后,然后计算得到各浮体表面的动压力分布,第m个浮体的表面动压力分布:

对于多浮体系统,第m个浮体的运动方程:

式中:μmm,λmm表示m浮体运动时的附加质量和阻尼系数矩阵;μml,λml表示系统中第l浮体单独运动时m浮体的附加质量和阻尼系数矩阵;Mm,Cm分别为第m个浮体的质量矩阵、恢复力矩阵与所受波浪力。式中只有各个浮体的运动响应为未知数,其他各项均可通过速度势求得。解式(8)中M个线性方程,则可以得到多浮体系统中各浮体的运动响应,频域下的波浪诱导载荷以进行总体强度分析。
将频域下的运动方程由傅立叶变换及Cummins脉冲理论进行时域分析,每个物体的运动方程都可写作:
但是式(15)中的T矩阵含多个0向量列,条件数大,对测量误差敏感,直接使用式(15)中的T矩阵进行结构误差辨识的效果较差,需要通过结构误差辨识性分析对T矩阵进行降维处理,输出辨识的结构误差项。

式中:m和A∞分别为Spar平台质量和无穷频率处的附加质量矩阵;D1和D2分别为线性和二次阻尼矩阵;f为速度矢量函数;K为静水刚度矩阵;x为位移矢量;h(τ)为表征记忆效应的时延函数;q为激励力矢量。在时域下求解,得到双浮体六自由度运动时历。
Spar平台拖拉装船及驳运阶段以9组支架支撑。浮卸作业准备阶段,支架与驳船解除,仅与Spar平台相连。驳船下潜阶段,驳船和支架间可能发生接触,并通过支架传递到Spar平台。因此,在计算中,将支架简化为耦合弹簧单元以模拟两个浮体之间的接触[13],该单元可同时考虑两个浮体各自的运动,只传递压力不传递拉力。求解时域下双浮体运动方程时,考虑此弹簧单元的阻尼对运动的影响。
2 数值计算模型
2.1 Spar平台模型
选取某典型Truss Spar及半潜驳船作为研究对象,建立各自的三维水动力模型及结构有限元模型。Truss Spar的主尺度见表1。在浮卸过程中,Spar平台水平放置,其水动力模型由面元模型及Morison模型两部分组成,如图3所示。结构模型如图4~5所示,由68 260个单元组成,包括硬舱、软舱、垂荡板和桁架结构上所有的板及主要的骨材。支架的分布及编号如图6所示。整体强度计算时定义3个边界点,边界点的位置及自由度的选择以不限制平台结构的自由变形且可以对整个刚体提供支持为原则;局部碰撞接触力分析时,在Spar平台结构两端提供弹性支持以减小边界应力集中,正确反映局部应力水平。

图3 Truss Spar平台的水动力模型Fig.3 Panel model and Morrison model of Truss Spar

图4 Truss Spar的结构有限元模型Fig.4 Structural model of Truss Spar

图5 Spar平台内部结构示意Fig.5 Detailed model of Truss Spar

图6 支架分布及编号说明Fig.6 Arrangement of cradles
2.2 半潜驳船模型
半潜驳船的水动力模型与Spar平台模型建立方法一致,如图7所示。模型尺寸为222 m×42 m×13.3 m(长×宽×深),最大下潜深度为26.8 m。选择最危险的浮卸状态,即Spar平台刚刚自浮的时刻。此时半潜驳船和Spar平台刚刚分离,接触力最为显著。在这一状态下,半潜驳船下载吃水为21.78 m,排水量112 111 t。半潜驳船质量模型即结构有限元模型如图8所示。组合后的双浮体水动力模型如图9。

图7 半潜驳船水动力模型Fig.7 Panel model of semi-submersible barge
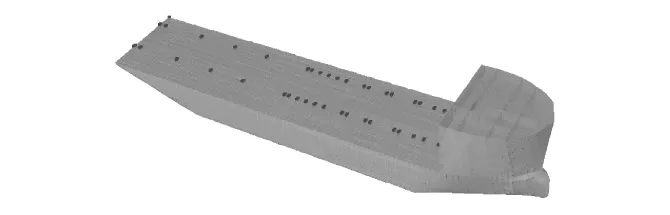
图8 半潜驳船结构有限元模型Fig.8 Structural model of semi-submersible barge

图9 双浮体系统水动力模型Fig.9 Hydro model of multi-body
2.3 环境参数及计算工况选择
一般情况下,浮卸作业对现场环境条件的选择要求极为严格,因此选择实际施工中允许的最恶劣海况进行计算,并且对碰撞接触力进行关于波向及周期的敏感性分析。从保守角度出发,假设最危险工况时最大波浪诱导载荷与最大碰撞接触力同时发生。表2对工况定义及各工况环境条件说明,其中总工况L101为波浪载荷工况D101和接触力工况S101的组合,以此类推。

表1 Truss Spar平台主尺度Tab.1 Scantling data of Truss Spar

表2 环境参数及工况定义Tab.2 Load case No.& parameters of environment
3 结果及讨论
3.1 碰撞接触力结果
根据以上理论及求解步骤,计算得到频域下Spar平台的六自由度运动RAO及波浪诱导载荷RAO,图10~12为Spar平台垂荡、横摇及纵摇运动的RAO。进行波浪载荷的加载及结构准静力分析得到只考虑波浪力情况下的总体强度分析结果,其中波浪随机相位取令应力结果最大的相位。
在时域下求解双浮体运动方程,得到一小时下六自由度运动时历及弹簧单元受力时历。表3中列出了各工况下对应的垂荡、横摇和纵摇运动及碰撞力合力的时历统计值结果。以C103首斜浪工况为例,列出了一段典型时间段内Spar平台及半潜驳船垂荡运动的时历对比图以及第一组支架的接触力时历,如图13~14。将九组弹簧受力时历相加,得到Spar平台受到的接触力合力。极值时刻的各组接触力结果见表4(取C101~C104工况为例)。将这组支座接触力施加在Spar平台对应位置,得到只考虑碰撞接触力作用下的结构强度分析结果。

图10 Spar平台垂荡运动RAOFig.10 Spar heave RAOs

图11 Spar平台横摇运动RAOFig.11 Spar roll RAOs

图12 Spar平台纵摇运动RAOFig.12 Spar pitch RAOs

图13 C103工况,Spar平台及半潜驳船垂荡运动时历Fig.13 Time series of heave motion:C103-quartering sea

图14 C103工况,第一组支架(P1&S1)受力时历Fig.14 Time series of fender:C103 P1& S1

表3 Spar平台垂荡、横摇、纵摇运动及接触力合力统计结果Tab.3 Statistical results of the heave,roll and pitch motion

表4 碰撞接触力最大时刻及每组弹簧单元受力大小Tab.4 Moment of maximum vertical force& fender forces
从垂荡运动时历及弹簧受力时历结果可以看出,弹簧受力时刻与两条垂荡运动曲线重合部分相对应,在该时刻Spar平台及半潜驳船间产生碰撞接触。在Spar平台刚刚自浮的浮卸双浮体阶段,Spar平台和半潜驳船间会发生多次碰撞接触。
由Spar平台运动统计结果可以看出,在相同波高及周期下,垂荡、横摇及纵摇运动均在横浪下具有最大的响应幅值,斜浪次之,迎浪最小。碰撞接触力合力随波浪方向改变的趋势与平台运动的变化趋势相同。特别地,在横浪状态下,运动响应及接触力幅值都大幅增大。而在相同波高及波浪方向下,平台的垂荡、横摇及纵摇运动响应以及接触力合力均随波浪周期的增大而增大。可见,波浪方向及周期都显著地影响了浮卸作业过程中Spar平台和半潜驳船的运动响应及碰撞接触力的大小,进而影响Spar平台结构应力水平分布。
从各组弹簧单元受力大小结果可以看出,在各工况下,Spar平台软舱受到的接触力最大,硬舱顶部次之,垂荡板下方的接触力则较小。这种现象说明,碰撞接触更容易发生在Spar平台软舱及硬舱顶部。造成这种现象的原因主要有两方面:第一是由于Spar平台及驳船的纵摇运动使得在首尾两端的软舱及硬舱顶部与驳船甲板更容易发生碰撞;第二是由于Spar平台桁架相对刚度较小且跨度较长,由桁架连接的软舱部位的运动加速度、速度及变形较大,碰撞接触效果显著。
3.2 Spar平台应力结果
通过线性叠加法将总体强度分析结果及局部碰撞接触力结果进行合并,得到浮卸作业双浮体阶段Spar平台总的结构强度分析结果。图15~17为L103工况下,Spar平台包括垂荡板、软舱结构的相当应力(Von-Mises)结果及桁架结构的内力。在表5中,总结了L103及L104工况下高应力水平的具体数值并说明了高应力水平构件位置,这两个工况反应了Spar平台应力水平的一般趋势。

图15 L103工况下垂荡板Von-mises应力结果Fig.15 Von-mises stress of heave plate:L103

图16 L103工况下桁架结构的内力结果Fig.16 Axial force of truss members:L103

图17 L103工况下软舱外部及软舱内部结构Von-mises应力结果Fig.17 Von-mises stress of soft tank shell and inner soft tank:L103
可以看出Spar平台的高应力水平主要出现在桁架分别与软舱、硬舱相交区域的构件,及硬舱内部构件上,平均应力水平不超过70 MPa。这是由于Spar结构的桁架与软舱和硬舱的连接区域是结构形式及截面刚度突变处,也是结构高应力水平出现的区域;硬舱压载水和内部构件重量大,在硬舱外壳和垂向舱壁区域出现相对高应力水平。局部最高应力水平不超过100 MPa。同时,结构软舱部分由于受到的接触力较大,应力水平较高。不过,受到浮卸作业环境条件的严格限制,计算海况比较良好,无论波浪诱导载荷还是双浮体的碰撞接触力都较小,这些高应力区域的应力水平不高。尤其是双浮体之间的碰撞接触力,在整个过程都维持在相对较小的水平,对Spar整体结构应力水平影响较小。
这里应用的结构强度数值计算方法不仅适用于Spar平台浮卸作业双浮体阶段,并且同样适用于其他波浪中的多浮体系统结构强度分析,例如海上浮拖工程、FLNG旁靠作业等施工。同时,如果浮卸作业时环境条件突然恶化,双浮体运动响应、接触力以及波浪诱导载荷会大幅增加,进而显著增大结构应力水平,有可能造成结构破坏。更危险海况下Spar平台及半潜驳船的结构强度分析将在今后的研究中讨论。

表5 Spar平台结构高应力水平位置及大小总结Tab.5 Summary of the stress level
4 结语
针对Truss Spar平台浮卸作业双浮体阶段,提出载荷求解及结构强度分析方案。如何确定接触力的大小,以及如何确定碰撞接触条件下Spar平台的结构强度,在本研究中给出了解答。计算得到的结论如下:
1)基于三维势流理论考虑浮体之间的水动力影响,在频域及时域下求解运动方程得到波浪诱导载荷及双浮体碰撞接触力,以线性叠加方法将两种载荷强度分析结果进行组合,这种方法能够较真实且合理地模拟Spar平台在浮卸作业双浮体阶段所受到的载荷,并反映此工况下结构强度应力水平。这种分析方案不仅可以用在Spar平台浮卸作业强度分析中,还可以推广到其他近靠多浮体浮式海洋工程结构物的强度分析中。
2)浮卸作业波浪方向以及频率在很大程度上影响双浮体的运动性能及碰撞接触力的大小。横浪、斜浪海况较之迎浪海况会产生更大的波浪诱导载荷及双浮体接触力,波浪频率在一定范围内增大也会使接触力增大。在实际作业中,应对波浪方向进行控制和调整,选择较安全的海况。
3)在浮卸作业中,Spar平台尾部软舱区域及首部硬舱顶端区域较容易与驳船甲板发生接触,此区域可能会受到较大的碰撞接触力。
4)由于浮卸作业要求海况较严格,波高较小,波浪周期较短,因此作业要求的海况下,Spar平台的结构应力水平较低,一般不会对构件强度产生明显影响。但Spar平台硬舱、软舱和桁架连接区域及硬舱内部构件出现局部高应力水平,这是因为结构连接区域是结构形式和截面刚度突变区域。硬舱压载水和构件重量大,因此在硬舱外壳和垂向舱壁区域会出现相对较高的应力水平。
基于弹性分析理论,以线性叠加法对Spar平台结构分析结果进行组合,且碰撞接触力分析中由于两浮体运动较缓慢而没有考虑由相对加速度引起的碰撞放大系数。对于更恶劣海况,应计入结构的非线性变形及碰撞放大系数的影响,这些将在在今后的工作中进行研究讨论。
[1]Jim J Wang,Berg S,Luo Y H,et al.Structural design of the Truss Spar– an overview[C]//Proc.of 11th ISOPE Conference.2001:354-361.
[2]Glanville R S,Halkyard J E,Davies R L,et al.Neptune project par history and design considerations[C]//Offshore Technology Conference.1997:OTC8382.
[3]Jim J Wang,Ph D P E.Spar platform design considerations for pre-service conditions[C]//10th Annual Meeting of China Association for Science and Technology.2008:1538-1542.
[4]Jim J Wang,Leppanen J,Beattie M.Constitution Spar transportation challenges and solutions[C]//Deep Offshore Technology International Conference.2006:DOT23.
[5]Jim J Wang,Roger Lu,Nathan Lu.Truss Spar strength and fatigue analysis for wet tow[C]//Proc.of 13th ISOPE Conference.2003:264-271.
[6]Abraham M,Nolte J,Peng B,et al.Front runner Spar transportation analysis– a rigorous approach[C]//Offshore Technology Conference.2005:OTC17294.
[7]Van Oortmerssen G.Hydrodynamic interaction between two structures of floating in waves[C]//Proc.of 2nd Behavior of Offshore Structure International Conference.1979:339-356.
[8]Loken A E.Hydrodynamic interaction between several floating bodies of arbitrary form in waves[J].Hydrodynamics in Ocean Engineering International Symposium,1981,2:745-779.
[9]Duncan J H,Barr R A,Liu Y Z.Computations of the coupled response of two bodies in a seaway[C]//International Workshop on Ship and Platform Motions.1983:26-28.
[10]Korsmeyer F T,Lee C H,Newman J N.Computation of ship interaction forces in restricted waters[J].Journal of Ship Research,1993,37:298-307.
[11]Inoue Y,Islam M R.Comparative study of numerical simulation and the experimental results for a parallelly connected FPSO and LNG in waves[C]//Proc.of 9th ISOPE Conference.1999:360-367.
[12]Buchner B,Van Dijk A,de Wilde J.Numerical multiple-body simulations of side-by-side mooring to an FPSO[C]//Proc.of ISOPE Conference Stavanger.2001:343-353.
[13]SIMO Theory Manual Version 3.4[S].Norway,Report 516412.00.03,2004:67-72.
Structural analysis for a Truss Spar during float-off operation
YANG Yue1,YANG Jian-min1,HU Zhi-qiang1,FAN Zhi-xia2,SUN Wei-ying2
(1.State Key Laboratory of Ocean Engineering,Shanghai Jiao Tong University,Shanghai 200240,China;2.COOEC,Tianjin 300452,China)
In the float-off operation for a Truss Spar platform,the semi-submersible barge constantly increases its ballast until the Spar platform is floating freely and towed off the barge.Structural analysis of the multi-body stage during the float-off operation for a Truss Spar is proposed.It consists of two steps:one is global strength analysis for the wave loads and the other is strength analysis for the contact forces between Spar and the vessel.Considering the hydrodynamic interaction between the two floating bodies,the wave loads in frequency domain and the time series of contact forces in time domain are investigated with the help of the code SESAM.The results of the Spar components are obtained with the combination of the structural analysis results under wave loads and contact forces application based on the linear superposition method.Contact forces under different wave directions and periods are discussed.The global stress level and high stress area of the Spar components can be obtained to assess the float-off strength condition of the Spar platform.
Truss Spar;float-off;multi-body floating system;load solving;structural analysis
P751
A
1005-9865(2012)04-0021-08
2011-12-01
国家重大专项课题资助项目(2011ZX05026-006-05)
杨 玥(1988-),女,天津人,硕士生,主要从事船舶与海洋工程水动力学方面研究。E-mail:yangyue.wei@gmail.com
猜你喜欢
人民长江(2023年6期)2023-07-25 12:24:14
中外文摘(2022年13期)2022-08-02 13:46:16
学苑创造·A版(2022年4期)2022-06-18 11:22:44
地质装备(2021年2期)2021-04-23 07:33:52
舰船科学技术(2021年12期)2021-03-29 01:28:12
当代陕西(2020年24期)2020-02-01 07:06:46
小哥白尼(趣味科学)(2018年12期)2018-12-18 02:13:58
水利与建筑工程学报(2018年4期)2018-08-21 07:47:54
船海工程(2015年4期)2016-01-05 15:53:30
中国航海(2014年1期)2014-05-09 07:54:24