神舟飞船交会对接信息流可靠性设计
2011-12-26 14:28兰天高建军王菁
航天器工程 2011年6期
兰天 高建军 王菁
(北京空间飞行器总体设计部,北京 100094)
1 引言
空间交会对接是航天器在太空中同一轨道上逐渐接近,并最终建立组合体的过程。从20世纪60年代美苏两国分别实现交会对接至今,世界上已进行了数百次航天器交会对接[1-3]。实现交会对接是我国载人航天工程第二阶段发展战略的重要一步,即在发射目标飞行器后发射神舟飞船,由两者共同进行我国首次空间交会对接试验[4]。
航天器中的信息流是由不同系统、分系统间交互传输的指令、数据等信息共同组成的。传统的数管分系统通常采用“透明转发”的方式处理信息流,不对其内容进行处理、校验。在交会对接过程中,神舟飞船内部及飞船与目标飞行器间需通过信息流交互实现协同。若按传统方式处理交会对接信息流,当传输数据内容不正确时,会引起误操作,进而导致交会对接的失败。因此,数管分系统需针对我国交会对接试验的特殊需求进行专门的方案设计,以确保交会对接信息流的可靠传输。
在我国交会对接试验中,由制导导航与控制(GNC)、对接机构、测控和数管等4个分系统共同实现。针对交会对接试验中协同控制的需要,本文提出了一种交会对接信息流可靠性设计方案,将信息流处理分为信息采集、信息鉴别和信息转发3步,并根据飞船内部信息流及飞船与目标飞行器间信息流各自的特点,分别从软、硬件角度,通过硬件冗余、信息鉴别、智能转发等设计,达到了信息流可靠传输的目的。
2 交会对接信息流分析
在交会对接中,协同控制的目的是2个航天器间的对接机构实现物理连接并锁紧。在飞船内部,交会对接过程中需要进行协同的分系统主要有GNC、对接机构、数管和测控等,各分系统间的协同通过信息流交互实现,如图1所示。
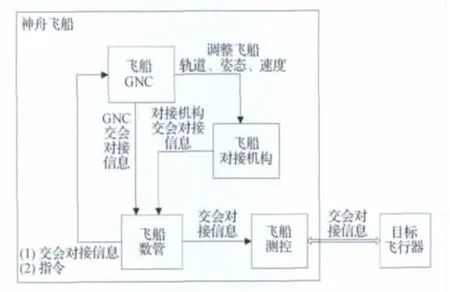
图1 交会对接协同控制Fig.1 Cooperation control in rendezvous and docking
为实现对接机构的接近、接触、锁紧,需通过GNC分系统控制航天器的轨道、姿态、速度。在神舟飞船中,GNC进行控制的依据是由数管分系统负责传输的交会对接信息流。如图1所示,在交会对接过程中,飞船数管从飞船对接机构、飞船GNC 采集交会对接状态数据,在数管内部对采集到的信息进行鉴别、处理。当判定数据有效时,数管分系统将交会对接信息转发给GNC,并通过指令控制GNC分系统相关设备的工作模式。同时,飞船数管通过飞船测控将交会对接信息经无线信道转发给目标飞行器,交会对接信息经目标飞行器测控、目标飞行器数管的处理后,最终到达目标飞行器GNC分系统。飞船GNC与目标飞行器GNC 依据收到的交会对接信息,分别调整飞船与目标飞行器的轨道、姿态、速度,以使飞船对接机构、目标飞行器对接机构实现接近、接触、锁紧。
在上述过程中,数管主要通过1553B 总线实现与其他分系统间的信息交互[5-7]。与各终端连接的1553B总线均包括A、B两条总线,默认使用A总线通信;2条总线互为备份,若其中一条总线发生故障,则自主切为另一条总线工作。中央终端单元(CTU)作为1553B总线的控制端,负责控制1553B总线上的所有通信。数管远置终端单元(RTU)分布于神舟飞船的不同舱段,RTU可将通过硬口采集遥测数据在1553B总线上传回CTU。
3 交会对接信息流可靠性设计
数管分系统在进行信息传输时需遵循2条原则:不错传和不漏传。在交会对接信息流设计中,数管分系统需解决的主要问题有:①如何控制信息采集的开始/停止;②如何判断信息采集通道的有效性,当信息采集通道无效时,如何切换信息采集通道;③如何鉴别信息的有效性,并采取相应动作;④如何节约飞船与目标飞行器间有限的无线信道资源。
为解决上述问题,数管分系统将交会对接信息流的处理划分为3个环节:信息采集、信息鉴别及信息转发,并从飞船内部信息流及飞船与目标飞行器间信息流2个角度分别设计信息流传输方案。
在信息采集环节,需保证采集通道的有效性。为此,一方面需对采集通道进行冗余设计,在某条通道出现故障时可切换到其他通道;另一方面需对采集通道进行定期巡检,以确定各条通道的工作状态,选择有效的采集通道。
在信息鉴别环节,需验证采集回来信息的有效性,并根据信息是否有效,决定下一步的处理方式。通常,可通过数据校验和对信息的有效性进行验证。当信息有效时,继续进行信息转发;当信息无效时,应不予转发,并通过自动或手动方式切换采集通道。
在信息转发环节,需根据信道选择转发方式,在确保正确转发的同时,也要考虑到信道资源的合理利用。按传输信道不同,交会对接信息流可分为两类:一类是飞船内部分系统间的信息流,另一类是飞船与目标飞行器间的信息流。飞船内部分系统间的信息流通过1553B总线传输,在总线流量允许条件下,应通过多重转发方式提高传输可靠性。飞船与目标飞行器间的信息流通过无线信道传输,考虑到无线信道容量有限,为减少对信道流量的浪费,应在转发信息前对信息内容进行判断,避免转发无用信息。
3.1 飞船内部信息流可靠性设计
在交会对接过程中,GNC分系统负责控制飞船的轨道、姿态和速度,由对接机构分系统实现飞船与目标飞行器的物理连接。对接机构分系统与GNC分系统间需相互协作,共同完成与目标飞行器的交会对接。在神舟飞船中,GNC与对接机构间的通信通过数管分系统实现,如图2所示。

图2 神舟飞船内部交会对接信息流Fig.2 Rendezvous and docking information stream in Shenzhou spaceship
飞船内部信息流处理也分为信息采集、信息鉴别和信息转发3个环节。数管RTU 通过硬通道采集对接机构分系统交会对接状态后,通过1553B 总线将信息发给数管CTU。在CTU 内部对信息进行处理后,转发给GNC分系统。
在信息采集环节,数管分系统需解决3个问题:①对信息采集开始/停止的控制;②对信息采集通道有效性的判断;③在某条信息采集通道发生故障时,对信息采集通道进行切换的方式。
在该方案中,数管分系统使用程控指令实现对信息采集开始/停止的控制。从图2中可见,交会对接信息从对接机构分系统到数管分系统需经历2步:首先,由多个数管RTU 通过遥测采集通道从对接机构控制器采集交会对接信息;然后,数管CTU从选定RTU 处获取数据。1553B 总线的操作都由数管CTU 发起,数管分系统通过程控指令控制CTU 内部状态,进而控制信息采集的开始/停止。当数管CTU 在收到“开始转发交会对接用信息”指令后,开始周期性通过RTU 从对接机构控制器采集数据;在收到“停止转发交会对接用信息”指令后,停止采集。控制指令可以预先植入飞船的飞行程序,也可通过遥控实时上注。图中虚线表示RTU之间互为冗余关系,CTU 根据信息有效性判断准则,决定从其中某一个RTU 采集数据为有效数据。
该方案通过总线巡检实现对RTU到CTU 通道有效性的判断。数管CTU 周期性查询RTU 的总线终端状态,若某RTU 的总线终端状态显示与该RTU“A、B 总线皆不能正常通信”,则认为该采集通道无效;否则,认为该采集通道有效。
如图3所示,该方案根据信息鉴别环节对交会对接信息的校验结果,判断对接机构到RTU 通道的有效性。交会对接信息的校验准则由数管与对接机构协商决定,包括以下3项:
(1)从对接机构采集的交会对接信息的校验和计算结果正确;
(2)RTU 设备工作正常,采集数据有效并且不全部等于CTU 默认填充值;如果CTU 与RTU 间1553B总线通信异常,CTU 会将从RTU 采集到的数据用默认填充值替代;
(3)从对接机构采集数据的指定字节不是无效值:通过该指定字节中表示对接机构控制器的工作状态,由对接机构分系统与数管分系统约定什么是该字节数据的无效值。只要对接机构分系统工作正常时,该字节不可能是无效值。
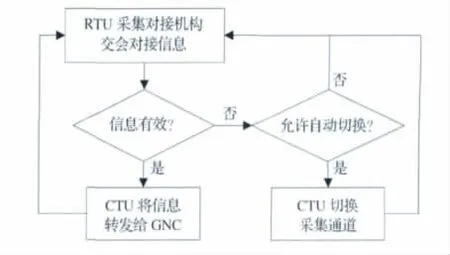
图3 神舟飞船内部交会对接信息鉴别流程Fig.3 Rendezvous and docking information identifying flowin Shenzhou spaceship
当满足以上所有条件时,认为交会对接信息有效;否则,认为信息无效。当发现有无效信息时,则怀疑此条采集通道上从对接机构到RTU 通道工作不正常,考虑切换采集通道。数管分系统设置了“自动切换”和“手动切换”两种采集通道切换模式。在“自动切换”模式下,由数管CTU 自主切换采集通道,若切换后采集到的数据仍然无效,则继续切换;在“手动切换”模式下,通过遥控注入选择采集通道。
在信息鉴别环节判定当次采集数据有效后,进入信息转发环节。从图2中可见,在进行数据转发时,数管CTU 不再检查与GNC分系统各控制器间的通信状态,直接将校验正确的数据发向所有GNC控制器。
由本节可见,该方案通过硬件设计上的采集通道冗余、1553B总线冗余及软件设计上的采集通道切换、数据有效性校验等策略,为飞船内部交会对接信息流可靠性传输提供了保障。
3.2 飞船与目标飞行器间信息流可靠性设计
GNC分系统针对交会对接任务设计了一系列测量敏感器,如CCD、交会雷达、GPS等。在交会对接的不同阶段,各GNC 敏感器的测量精度和测量范围各不相同。而且由于遮挡、设备特点和测量原理等原因,决定了这些敏感器存在测量视场受限等问题。为在合适的时间以合适的方式使用合适的敏感器,需在飞船GNC与目标飞行器GNC 间建立协同控制[8]。
如图4所示,飞船与目标飞行器间的交会对接信息流由飞船GNC分系统产生,通过数管、测控等分系统转发给目标飞行器GNC分系统,目标飞行器GNC根据收到的信息进行相应操作。同时,飞船GNC需在交会对接过程中切换GNC 测量敏感器的工作状态。
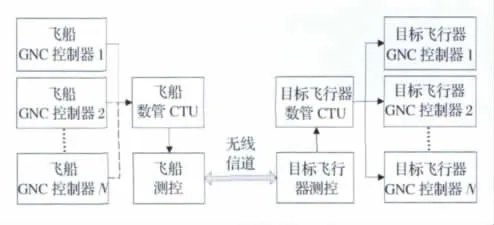
图4 飞船与目标飞行器间交会对接信息流Fig.4 Rendezvous and docking information stream between spaceship and target spacecraft
在该方案中,对飞船与目标飞行器间交会对接信息流的处理同样被分为信息采集、信息鉴别和信息转发3个环节。在信息鉴别环节,通过程控指令实现了GNC测量敏感器的工作模式切换。
在信息采集环节,该方案以程控指令控制信息流传输的开始/停止,控制指令可以是飞船飞行程序中预先植入的指令,也可以是通过遥控注入的指令。
该方案通过总线巡检判断信息采集通道的有效性。若某GNC 控制器的总线终端状态显示与该GNC控制器“A、B 总线皆不能正常通信”,则认为该采集通道无效;否则,认为该采集通道有效。飞船GNC分系统由多个主、备份控制器,数管分系统在完成采集通道有效性判断后,从中选择一个通道进行采集;采集通道选择准则由数管分系统、GNC分系统协商决定,包括以下3项:
(1)与任意数量GNC主份控制器通信正常,从其中优先级最高者处进行采集;
(2)与所有GNC主份控制器通信均不正常,且与任意数量GNC 备份控制器正常通信时,从GNC备份控制器中优先级最高者处进行采集;
(3)与所有GNC 主、备控制器通信均不正常,从GNC主份控制器中优先级最高者处进行采集。
在信息鉴别环节,数管分系统需做三方面工作:一是对采集到的信息进行校验;二是根据交会对接信息判发程控指令,控制GNC测量敏感器切换工作模式;三是节约无线信道资源,避免发送无用信息。
飞船与目标飞行器间交会对接信息鉴别流程如图5所示。在交会对接过程中,周期性进行对交会对接信息的鉴别,并根据鉴别结果进行相应操作。在鉴别过程中,首先判断GNC 控制器的工作状态,随后从有效的GNC 控制器采集交会对接信息。该方案通过校验和对采集信息的有效性进行判断;当校验和有效性判断不正确时,本次采集的内容无效,不做进一步处理;当校验和有效性判断正确时,为避免无线信道资源浪费,飞船数管进一步判断本次采集的交会对接信息与上一次发送的交会对接信息是否重复;若数据重复,为节约无线信道资源,不向测控分系统转发;若不重复,则按约定次数向目标飞行器连续转发交会对接信息,在到达约定次数之前,不因采集信息无效而停止转发。当本次采集是第一次有效采集时,直接按约定次数向目标飞行器连续转发交会对接信息。
在完成交会对接信息有效性、重复性的判决后,数管分系统需根据变化后信息的稳定性判发是否发送相应程控指令,控制GNC 测量敏感器切换工作模式。信息稳定性的判断标准由数管、GNC 协商决定:当交会对接信息指定字节变化,且发生变化后连续数次采集信息有效,数管发送相应程控指令;否则,数管不发送程控指令。
在完成一次交会对接信息鉴别并进行相应操作后,该进程挂起,等待下一周期的执行。
由本节可见,该方案通过硬件设计上的1553B总线冗余及软件设计上的采集通道选择、数据有效性校验、根据数据重复性的选择性转发、根据数据变化后稳定性判发条件令等策略,实现了飞船与目标飞行器间的交会对接信息流的可靠传输及飞船GNC测量敏感器工作模式切换,为飞船与目标飞行器的交会对接提供了保障。

图5 飞船与目标飞行器间交会对接信息鉴别流程Fig.5 Rendezvous and docking information identifying flow between Spaceship and Target Spacecraft
4 结束语
我国首次空间交会对接试验的圆满成功,在飞船内部、飞船与目标飞行器间实现交会对接信息流的可靠传输至关重要。本文在分析交会对接信息流传输需求的基础上,在信息流传输过程中综合使用硬件冗余、软件鉴别等手段,实现了交会对接信息流的可靠传输。该方案具有高实时性、高可靠性的特点,已在神舟飞船上得到应用,并可用于未来航天器间的交会对接。
(References)
[1]林来兴.空间交会对接技术[M].北京:国防工业出版社,1995
Lin Zaixing.Space rendezvous and docking technology[M].Beijing:National Defense Industry Press,1995(in Chinese)
[2]朱仁璋.航天器交会对接技术[M].北京:国防工业出版社,2007
Zhu Renzhang.Rendezvous and docking techniques of spacecraft[M].Beijing:National Defense Industry Press,2007(in Chinese)
[3]戚发轫.载人航天器技术[M].北京:国防工业出版社,2003
Qi Faren.Manned spacecraft technology[M].Beijing:National Defense Industry Press,2003(in Chinese)
[4]张柏楠,戚发轫.中国载人航天技术的历史性跨越[J].航天器工程,2008,17(5):1-6
Zhang Bainan,Qi Faren.Historic leap of China’s human spaceflight technology[J].Spacecraft Engineering,2008,17(5):1-6(in Chinese)
[5]谭维炽,顾莹琦.空间数据系统[M].北京:中国科学技术出版社,2004
Tan Weichi,Gu Yingqi.Space data system[M].Beijing:China Science and Technology Press,2004 (in Chinese)
[6]何雄文,孙勇.一种卫星数管中心计算机软件的工程实现[J].航天器工程,2007,16(5):47-53
He Xiongwen,Sun Yong.Engineering realization of software in central terminal unit of satellite data management system[J].Spacecraft Engineering,2007,16(5):47-53(in Chinese)
[7]赵俊艺,何兵哲.基于SpaceWire总线的星载数据系统[J].飞行器测控学报.2009,28(2):13-17
Zhao Junyi,He Bingzhe.Onboard data system based on spacewire bus[J].Journal of Spacecraft TT&C Technology,2009,28(2):13-17(in Chinese)
[8]吴宏鑫,胡海霞,解永春,等.自主交会对接若干问题[J].宇航学报,2003,24(2):132-37,143
Wu Hongxin,Hu Haixia,Xie Yongchun,et al.Several questions on autonomous rendezvous and docking[J].Journal of Astronautics,2003,24(2):132-137,143(in Chinese)
猜你喜欢
现代电子技术(2021年10期)2021-05-20
军事运筹与系统工程(2020年1期)2020-09-11
当代水产(2019年1期)2019-05-16
军事运筹与系统工程(2018年1期)2018-11-10
电子制作(2018年11期)2018-08-04
太空探索(2016年9期)2016-07-12
军事运筹与系统工程(2015年3期)2015-09-08
空间控制技术与应用(2015年2期)2015-06-05
舰船科学技术(2015年8期)2015-02-27
创业家(2015年1期)2015-02-27