苏/俄交会对接技术研究
2011-12-26 14:28朱仁璋王鸿芳肖清徐宇杰
航天器工程 2011年6期
朱仁璋 王鸿芳 肖清 徐宇杰
(1 南京大学,南京 210093)
(2 中国空间技术研究院,北京 100094)
(3 北京航空航天大学,北京 100191)
1 引言[1-16]
在将近半个世纪的岁月中,苏/俄在地球轨道运输飞船与空间站领域取得了令人瞩目的成就。对于开拓天疆的航天先驱者而言,挫折、失败甚至付出生命的代价,实难避免。像富于创新精神的美国人一样,苏/俄人民同样为人类探索宇宙作出了开创性的巨大贡献。
1957年10月,苏联将齐奥科夫斯基的航天理论变为现实,发射了世界上第一颗人造卫星,并在不到4年的时间内实现了载人空间飞行。在联盟-1航天员牺牲半年后的1967年10月,宇宙-186与宇宙-188(不载人“联盟”原型飞船)成功实现世界上首次两艘飞船之间的自动交会对接。1969年1月,苏联成功执行了联盟-4与联盟-5交会对接与乘员舱外转移使命,这是苏联首次载人对接。1971年,联盟-10飞船应用自动交会对接系统,进入礼炮-1空间站180m 范围内;随后,一名航天员掌控飞船完成对接。
在经历1971年6月联盟-11失事(导致3名航天员丧生)的重挫后,苏联将“联盟”改型为执行单一运输使命的“联盟渡船”,并在1973-1974年进行了几次飞行,准备1975年7月的“阿波罗-联盟号试验项目”(ASTP)飞行。在“阿波罗-联盟号试验项目”最初的对接过程中,“阿波罗”作为主动飞行器;而在之后的使命中,联盟号作为主动飞行器,进行两艘飞船的分离与再对接。1975年9月,宇宙-772(无人联盟号飞船)自动对接礼炮-4空间站,以验证自动交会对接技术,用于未来的无人飞行(如进步号货运飞船)。
在20世纪70年末、80年代初,“联盟”飞船发展为联盟号载人飞船与进步号货运飞船两个系列,分别为空间站提供乘员运送与物资补给服务。1978年1月,第一艘进步号货运飞船同礼炮-6空间站对接并转移燃料。自此,联盟号和进步号系列飞船与苏/俄空间站计划一同发展,成为可靠、有效的空间运输系统。联盟号和进步号系列飞船不仅为“国际空间站”(ISS)的组装与运作作出巨大贡献;而且在美国航天飞机退役后,联盟号飞船成为目前向“国际空间站”运送航天员的唯一工具,进步号飞船与欧洲航天局“自动转移飞行器”(ATV)及日本“H-2转移飞行器”(HTV)一起,组成“国际空间站”物资运输船队。
在苏联空间规划进程中,自动对接系统日趋成熟。早期的“指针”(Igla)交会导航系统已经被现在的“航向”(Kurs)交会导航系统代替。这两个系统都是雷达导航系统,根据天线信号的强度变化计算航天器间的相对位置。联盟号和进步号飞船向空间站的交会逼近,采用双共椭圆轨道与绕飞策略。
现在,俄罗斯已在研制接替联盟号和进步号飞船的新一代运输系统,这不仅将有力地增强地球轨道运输能力,而且直指俄罗斯未来的载人月球使命与载人火星使命。
2 联盟号与进步号飞船简史
从20世纪60年代初计划的“联盟绕月飞行器”中的联盟-A开始,苏/俄飞船历经改进,演变为许多型号。航天器型号的设计编号(如7K,7K-OK 等)是科罗廖夫设计局(OKB-1)建立的,所有联盟号与进步号飞船都应用“7K”编号,表示由该局设计的第7类载人或与载人相关的飞行器,“K”在俄语中代表корабль(飞船)。在苏联解体后,这种编号方法就不再使用了。图1描述了作为空间站运输工具的联盟号与进步号飞船的主要发展历程。
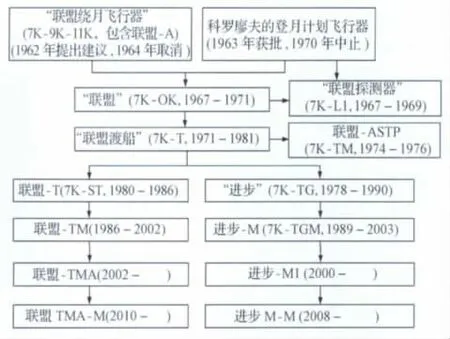
图1 苏/俄联盟号系列载人飞船与进步号系列货运飞船的主要型号Fig.1 Main variants of Soviet/Russian Soyuz/Progress as transport spacecraft
2.1 早期月球计划与联盟-A[8-9]
2.1.1 联盟绕月建议
“联盟绕月飞行器”(Soyuz Circumlunar Spacecraft,SCS)建议是1962年苏联科罗廖夫设计局总设计师科罗廖夫(S.P.Korolev,1907-1966)提出的,1964年被取消。“联盟绕月飞行器”的设计目的是将航天员送入绕月飞行轨道,它由3艘飞船组成(见图2),即联盟-A、联盟-B与联盟-V。其中:联盟-A是载人飞船,可将一名航天员送入地球轨道,并与已在轨运行的联盟-V(空中轨道加注飞船)对接,补充加注燃料;联盟-B 实际上只是一个助推火箭,一旦3艘飞船在轨对接在一起,联盟-B 发动机就点火,将组合飞行器送入地月转移轨道。
值得注意的是,联盟-A为以后联盟号载人飞船的设计打下了基础:①联盟-A采用3舱构型,即由下降舱、轨道舱与推进舱组成;②联盟-A下降舱应用烧蚀防热结构;③联盟-A轨道舱可作为航天员出舱的气闸舱。
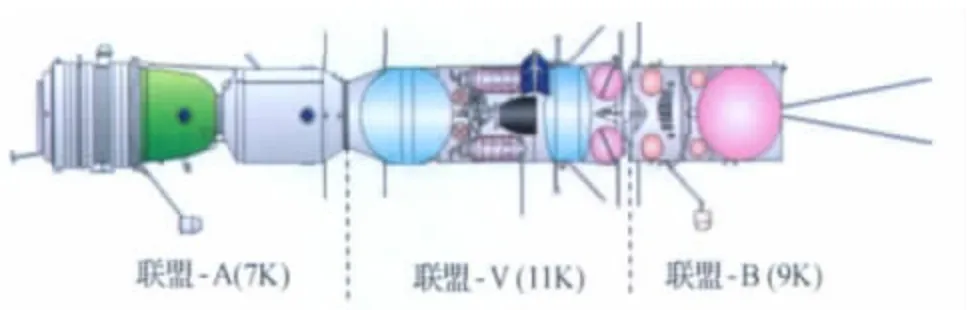
图2 “联盟绕月飞行器”[8]Fig.2 Soyuz Circumlunar Spacecraft
2.1.2 科罗廖夫登月计划
科罗廖夫的登月计划在“联盟绕月飞行器”取消后提出,整个飞行器由轨道器、着陆器与助推器三部分组成。其飞行程序如下:①飞行器进入地球轨道后,助推器点火将飞行器送入地月转移轨道;到达月球引力范围后,助推器再次点火,进入月球轨道。②在月球轨道上,一名航天员离开轨道器,通过舱外太空行走进入着陆器;然后,着陆器与轨道器和助推器的组合体分离,下降到月球表面,而另一名航天员留在轨道器内。③月面使命结束后,着陆器搭载登月航天员返回到月球轨道,并和轨道器与助推器的组合体交会对接;登月航天员经由舱外行走从着陆器回到轨道器,与同伴会合。④助推器再次点火,进入返回地球的转移轨道。这项载人登月计划在1963年12月获批,导致联盟-A重新设计,并被命名为“联盟”。登月使命计划应用联盟号飞船在地球轨道进行交会对接试验(类似美国“双子座”飞船)。1970年,在美国“阿波罗”飞船成功登月后,这项登月计划被中止。
2.1.3 “联盟探测器”
“联盟探测器”(Soyuz Zond,见图3)的设计目的是向月球载运航天员并返回地球。这项设计基于联盟-A与“联盟”飞船,基本上是从“联盟”飞船的设计中剥离下来的,仅含服务舱与下降舱,没有前面的轨道舱(生活舱)。在原轨道舱位置安装了一个锥形对接环与一副突出的大型天线;此外,“联盟探测器”装备新型发动机,以满足地月转移的动力需求。“联盟探测器”有两个型号,即7K-L1P(用于绕月使命)与7K-L1S(用 于 登月 使 命)。1968年9月15日,“联盟探测器”成功执行了世界上首次绕月飞行。所有“联盟探测器”飞行都是无人的,这个项目在1970年随苏联登月计划的终止而被取消。

图3 “联盟探测器”飞船[9]Fig.3 Soyuz Zond spacecraft
2.2 联盟号载人飞船系列[8-12,17-22]
2.2.1 “联盟”飞船
“联盟”飞船具有高度机动能力,可乘坐3名航天员,在地球轨道执行交会对接与太空行走运作,支持载人登月计划。“联盟”飞船沿袭联盟-A的3舱构型,外观与联盟-A相似,只是轨道舱外形更像葡萄,而不是原来的圆筒形。轨道舱顶端是柱形对接环,下降舱与服务舱使用网格结构相连,而舍弃笨重的连接环。“联盟”飞船采用杆锥对接系统,有两个型号,分别装备对接系统主动部分与被动部分。“联盟”飞船的对接系统不允许航天员在内部从一艘飞船转移到另一艘飞船,转移须通过舱外太空行走实现。1967年4月联盟-1失事,此后曾多次进行宇宙号(无人)飞船对接试验,为后来的载人飞行扫清道路。1969年1月,联盟-4与联盟-5成功执行了交会对接与航天员舱外转移使命(见图4)。
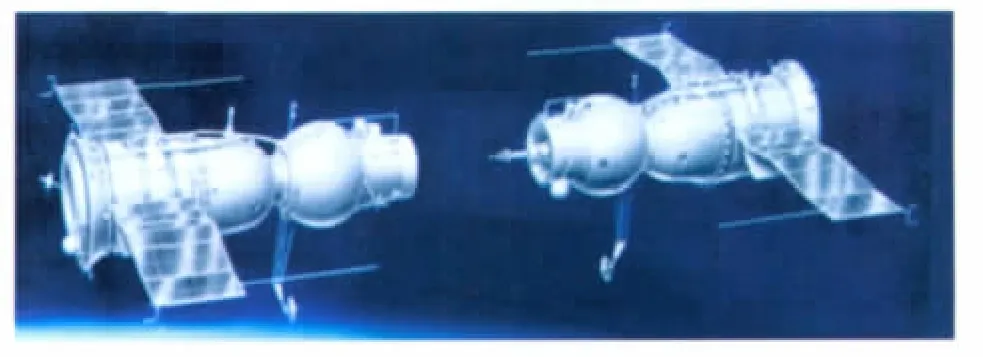
图4 将要对接的联盟-4与联盟-5飞船示意图[11]Fig.4 Drawing of Soyuz-4and Soyuz-5about to docking
在苏联中止登月计划后,“联盟”飞船附加改进的对接系统(对接后可形成内部转移通道),并将轨道舱由工作区转为贮物区,为礼炮号空间站服务。1971年4月19日,世界上第一个空间站礼炮-1发射;4月23日,3名航天员乘坐联盟-10飞向空间站。联盟-10飞船虽然与礼炮-1 空间站成功对接,但乘员未能进入空间站,而是在被迫解除对接后返回地球。1971年6月,联盟-11飞船与礼炮-1空间站对接,乘员进入空间站;但在返回过程中下降舱泄漏,导致3名航天员丧生。这次灾难性事故迫使“联盟”飞船全面修改设计,并将飞船功能仅限于为空间站提供运输服务,这就是“联盟渡船”。2.2.2 “联盟渡船”型飞船
“联盟渡船”(Soyuz Ferry,见图5)功能单一,仅作为空间站乘员与供给品的运输工具。与“联盟”飞船相比,“联盟渡船”的主要修改如下:①去掉太阳翼,改用蓄电池以增加货运能力。这意味着,除非飞船与空间站对接,否则飞船的运作时间不超过4天。②应用新的“指针”自动对接系统与礼炮号新的对接硬件。新对接硬件去掉了老的对接环,轨道舱缩短,但内部容积不变。③吸取联盟-11教训,航天员在发射与再入期间需穿上航天服,因此,乘员由3名(不穿航天服)减为2名(穿航天服)。1974年7月,“联盟渡船”型飞船联盟-14首次与礼炮-3(“钻石”型军用空间站)对接,并在空间站停靠16天。图6为联盟-26(“联盟渡船”型)对接在礼炮-6空间站后对接口上。

图5 “联盟渡船”型飞船[11]Fig.5 Soyuz Ferry spacecraft
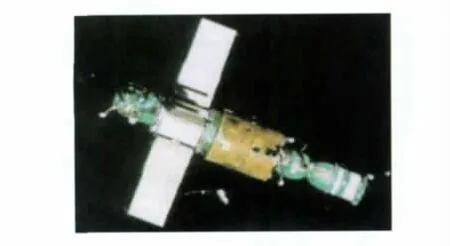
图6 联盟-26(“联盟渡船”型)对接在礼炮-6空间站的后对接口上[8]Fig.6 Soyuz-26(a Soyuz Ferry spacecraft)being docked at the rear part of the Salyut-6space station
2.2.3 联盟-ASTP飞船
联盟-ASTP(见图7)是为执行联盟号飞船与阿波罗飞船的联合飞行使命(Apollo-Soyuz Test Project,ASTP)而研制的联盟号系列飞船。联盟-ASTP由“联盟渡船”改型而来,其主要修改包括:①装备新的ASTP通用对接系统;②改进生命支持系统,可支持4名乘员;③装备一组新设计的太阳翼。1975年7月,联盟-19与阿波罗-18 先后发射,在轨成功进行了交会对接与再对接飞行(见图8)。
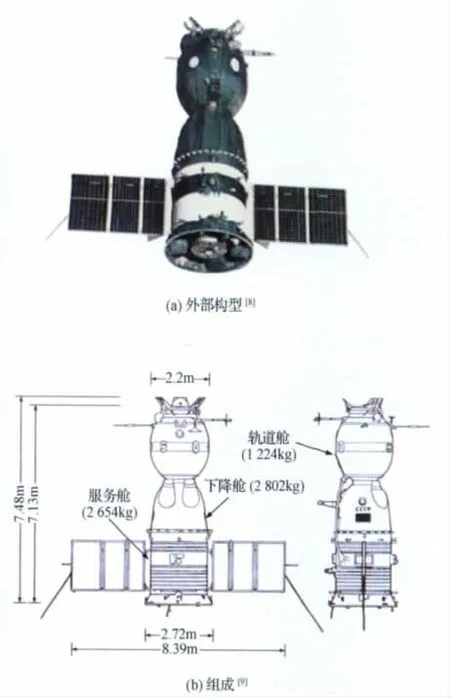
图7 联盟-ASTP飞船Fig.7 Soyuz-ASTP spacecraft
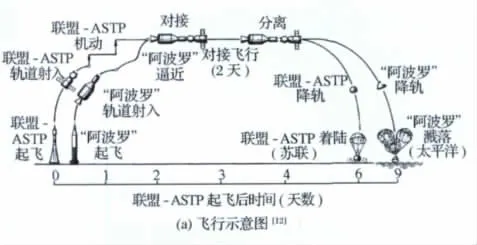
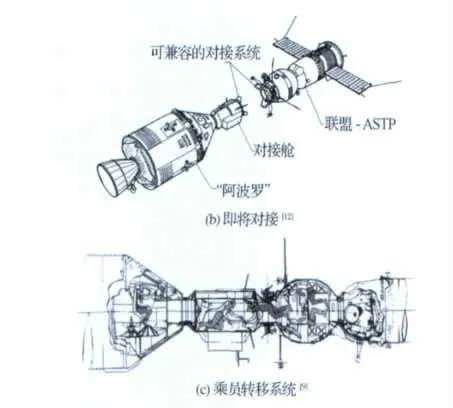
图8 “阿波罗”飞船与联盟-ASTP飞船的联合飞行Fig.8 Join flight of Apollo and Soyuz-ASTP spacecraft
2.2.4 联盟-T 飞船
联盟-T 在“联盟渡船”基础上作出了很大的改进,包括发动机系列、着陆火箭与发射逃逸塔。它可载运3人一组或2人一组的乘员以及货物箱。其特点是:①装备新型“氩”(Argon)数字计算机;②应用全自动飞行控制系统;③与“联盟渡船”相比,在服务舱重新安装一对太阳翼。航天员特别喜欢的一项改进是下降舱上的一对护罩。在再入地球大气期间,护罩可下降覆盖在下降舱的舷窗孔上。一旦下降舱的护罩被抛掉,航天员便可透过舷窗监视着陆过程;而在以前,舷窗孔常在再入过程中被烧成炭黑,乘员不能通过舷窗观察。另一项创新是,下降舱与服务舱组合体可与轨道舱分离,这不仅可作为解除对接故障的应对措施,而且在需要时可使轨道舱停靠在空间站,作为空间站的一个新舱段。
2.2.5 联盟-TM 飞船
联盟-TM(即联盟-T Mir,见图9)是为和平号(Mir)空间站运送乘员而设计的联盟号系列飞船。和平号为组合式空间站,由多达5个礼炮号型空间站组成,这些舱段在中心体(核心舱)周围对接为一体。为给这一新型空间站提供服务,苏联再次改进联盟号飞船,研制出联盟-TM。联盟-TM 装备了新型“航向”交会雷达系统与新型计算机系统。这两项新技术可使联盟号飞船在任何相对姿态下与和平号空间站对接。
1987年2月6日,联盟-TM 飞船首次发射,将两名航天员送到约1年前发射的和平号空间站,执行长达11个月的使命。两名航天员于1987年4月11日进行舱外活动,排除故障,完成了和平号空间站第一个扩展舱段量子-1(Kvant-1)的安装。1995年3月14日,联盟TM-21发射,载运一名美国航天员飞向和平号空间站;1995年7月7日,在航天飞机首次与和平号空间站对接后,这名航天员乘坐亚特兰蒂斯号(Atlantis)航天飞机返回地球。在这次使命中,“航向”系统在飞船与空间站的再对接中起到了重要作用。

图9 联盟-TM 飞船Fig.9 Soyuz-TM spacecraft
2.2.6 联盟-TMA飞船
联盟-TMA(见图10)是联盟-TM 的改进型,作为“国际空间站”的救生船,可在轨运作200天。联盟-TMA的基底比联盟-TM 略宽,以适合美国航天员使用。虽然联盟-TM 最初也用于相同的目的,但作为美国航天员的救生船尺寸略小,因为美国航天飞机乘员舱相对宽敞,所以对美国航天员的身高没有限制,联盟-TMA就解决了这个问题。
图10 联盟-TMA飞船侧剖视图[18]Fig.10 Aside cutaway view of Soyuz-TMA
2.2.7 联盟TMA-M 飞船
2011年7月美国航天飞机退役,直到美国新的载人运输器(如“猎户座”(Orion)或“龙”(Dragon))投入使用前,在4~5年的时间内,联盟号飞船将是从地面到“国际空间站”往返运送航天员的唯一桥梁。为此,俄罗斯研制了新一代载人飞船联盟TMA-M(见图11),以满足这一空档期“国际空间站”的现实需求,并且可为未来更先进的飞行器建造打下基础。
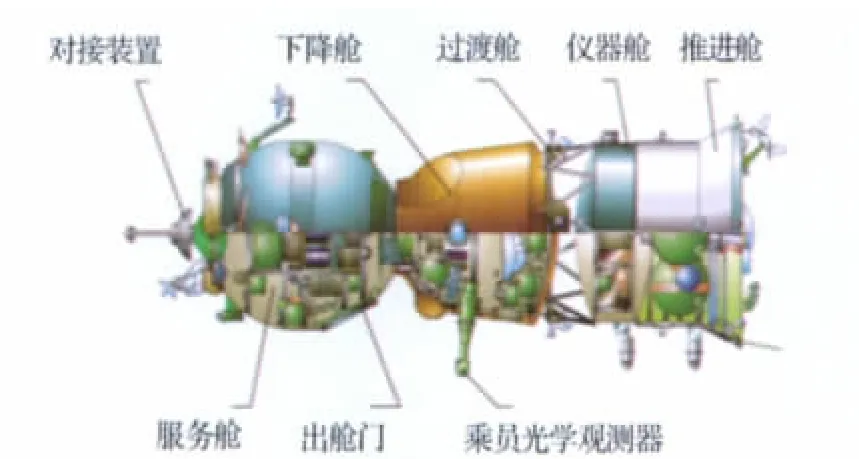
图11 联盟TMA-M 侧剖视图[19]Fig.11 Aside cutaway view of Soyuz TMA-M
联盟TMA-M是基于联盟-TMA的新系列载人飞船,外部构型与联盟-TMA完全相同,但在“运动与导航控制系统”(SUDN)、“船上测量系统”(SBI)与“热控系统”(SOTR)中,应用现代电子器件与软件,装备了新的仪器设备或更先进的系统(见图12)。系统的升级或更新使飞船总质量减少了70kg,且使地面装配得到简化。特别是,联盟TMAM 拥有先进的飞行控制计算机,并按“开放式体系结构”建造,因此,联盟TMA-M 也被非正式地称为“数字联盟”(Digital Soyuz)。
注:红色代表“运动与导航控制系统”中的新硬件;绿色代表“船上测量系统”;蓝色代表“热控系统”。
2.3 进步号货运飞船系列[8,11,22-25]
2.3.1 “进步”货运飞船
为满足空间站货物供给与燃料补给需求,联盟号系列飞船除作为载人飞船不断改进外,还改型为进步号货运飞船。1974年,“进步”货运飞船(见图13)计划获得批准。1978-1990年,“进步”飞船共发射43次。1978年1月20日,进步-1发射升空;2天后,进步-1与礼炮-6空间站自动对接;2月6日,进步-1脱离对接;2月8日,进步-1降轨,再入大气烧毁。“进步”与“联盟渡船”型飞船一样,没有太阳翼,但也只是外观相似而已。飞船内部有下列变化:①下降舱被一节油罐代替;②服务舱被扩大,容纳通常放在下降舱内的控制与对接系统;③轨道舱改装为货舱,装备一系列货架与货柜。“进步”飞船可运输2 300kg货物,其中燃料可达998kg。

图13 “进步”货运飞船构型[8]Fig.13 Configuration of Progress cargo spacecraft
2.3.2 进步-M 货运飞船
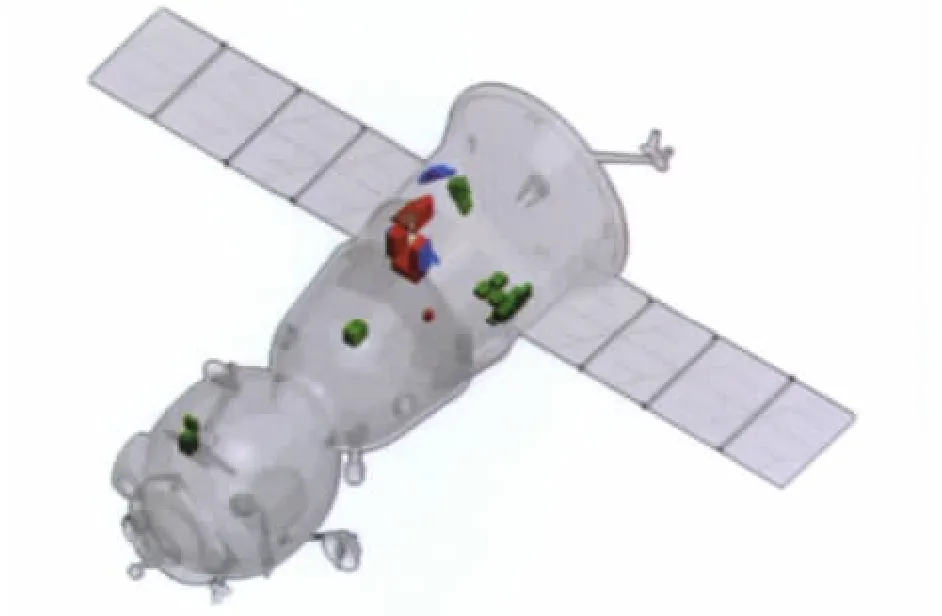
1986年,苏联开始研制升级型“进步”货运飞船,被称为进步-M(见图14)。其特点是:采用新的服务舱,改进了飞行控制系统,以及增大了运输能力。进步-M 有一组太阳翼,飞船可独立于空间站运作达30天。特别是苏联解体后,俄罗斯研发了人工操作对接系统,即“遥控操作交会单元”(Telerobotically Operated Rendezvous Unit,TORU),这个系统可由在空间站内的航天员操作,控制向空间站逼近的进步-M 飞船。1989年8月,第一艘进步-M 飞船发射,飞向和平号空间站。
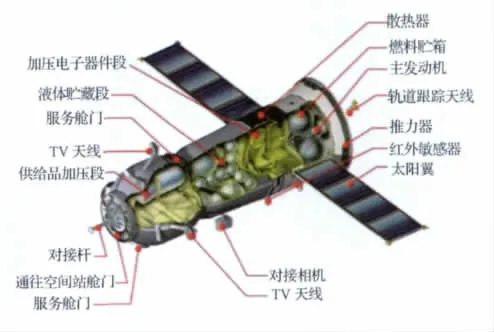
图14 进步-M 货运飞船剖视图[11]Fig.14 Acutaway drawing of Progress-M
2.3.3 进步-M1货运飞船
在俄罗斯成为“国际空间站”项目的成员国后,为了进一步增大燃料运输能力,进步-M 被改进为进步-M1,可发射2 230kg货物进入太空,其中装载燃料可达1 950kg(进步-M 每次飞行仅能运输1 200kg燃料)。新的数字飞行控制系统,与航向-MM(Kurs-MM)交会对接系统一起被引进进步-M1货运飞船中,替代以前的“航向”系统型号。除了向“国际空间站”运输货物外,进步-M1还将俄罗斯空间站对接舱运往“国际空间站”。进步-M1还作为空间拖船,将退役的质量达103t的和平号空间站向下拖进地球大气层。2000年2月,进步-M1飞船发射,飞向和平号空间站;2000年8月,进步M1-3发射,这是第一艘飞往“国际空间站”的进步号飞船。2.3.4 进步M-M 货运飞船
新一代货运飞船进步M-M 的研制目的是:①为新型载人飞船联盟TMA-M 更新系统进行飞行试验;②进一步改进进步号货运飞船的性能,提高运 输 能 力。从2008年11月到2011年8月,进 步M-M 共发射12次,其中,最后一次发射因运载火箭第三级推进系统故障而失败,未能进入轨道。进步M-M 装备现代TsVN-101数字飞行控制系统,代替过时的Argon-16计算机,并应用新的小型化无线电遥测系统MBITS。这些更新不仅使飞行控制系统更快、更有效地运作,而且船上电子器件的总质量减少了75kg,电子器件总数减少了15个。此外,新控制系统的结构、软件架构与性能,以及模块化设计,使调整软件以适应新的敏感器更容易。
3 交会导航系统
联盟号载人飞船与进步号货运飞船是苏/俄空间站活动的运输器。起初,这些航天器装备“指针”交会对接导航系统;在20世纪80年代中期,苏联空间规划应用新的“航向”系统替代了“指针”系统。在向新系统转换的过程中,这两个系统在和平号空间站都使用过,一个对接口应用“航向”系统,另一个对接口应用“指针”系统。现在,“航向”系统支持联盟号和进步号飞船与“国际空间站”的交会对接运作。从目标捕获直至对接,“航向”系统提供所有必要的相对导航信息,包括测距、测距率、视线角,以及相对姿态测量数据。
除了上述交会雷达系统用于自动运作外,在联盟号载人飞船上还使用手控装置。在联盟-4 与联盟-5的对接使命中,航天员曾使用六分仪导航。在联盟号飞船向空间站的交会逼近飞行中,手控器可作为备份,在应急情况下使用。在空间站中装备的“遥控操作交会单元”,可用于进步号货运飞船与空间站的交会对接。
3.1 “指针”雷达系统[9,26-27]
直到1986年之前,“指针”系统用于“联盟”、联盟-T 与进步号飞船的所有型号。在飞船之间的交会对接中,“指针”系统可以机动目标船姿态,使所选择的对接口面向追踪船,为追踪船与目标船的交会对接提供相对位置与相对姿态信息。
3.1.1 “指针”系统天线组成
在“联盟”追踪船与目标船上装备5种不同类型的射频天线,分别标为A、B、C、D、E,如图15所示。
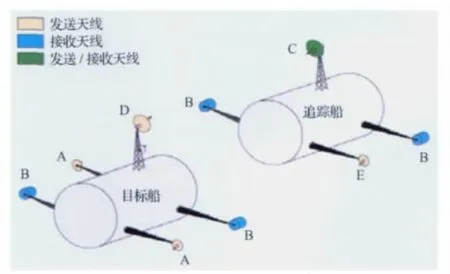
图15 “指针”系统射频天线[26]Fig.15 RF antennas of Igla system
(1)两副A型天线安装在目标船上,是固定全向天线,发送连续信号,向追踪船示意目标船的位置。
(2)B型天线组安装在两艘飞船上,是旋转搜索接收天线,用于测定相对指向。一艘飞船的B 型搜索接收天线捡拾另一艘飞船的进入信号,生成用于各自飞船的定位差异信号,之后,B型天线实现逐个对准。
(3)C型天线是安装在追踪船上的转移/接收窄波束天线,为万向架固定式碟状构型,用于跟踪目标船的相对角运动。
(4)D 型天线是安装在目标船上的固定碟状窄波束天线,可将测距数据传回追踪船。
(5)E型天线是追踪船上的另一种固定天线,用于近距离邻近运作,消除在近距离中被放大的非线性差异。
3.1.2 “指针”系统功能
“指针”系统可支持目标船与追踪船的对准,以及追踪船向目标船的逼近。
(1)目标船与追踪船的对准。如图16所示,在轨道射入点,目标船进入追踪船轨道几千米范围内,两艘飞船的相互搜寻捕获段开始。①首先,目标船用两副全向天线(A型)发送信号,向追踪船警示目标船的当前位置。同时,追踪船慢慢旋转,使其中一副接收天线(B型)能够采集标向信号。两副B型天线接收的信号强度差生成差异信号,这个差异信号可帮助追踪船确定目标船在哪个半球。②确定之后,追踪船将自己指向目标船,并保持其相对姿态。然后,追踪船通过窄波束天线(C 型)向目标船发送询问信号。目标船以一副旋转接收天线(B型)捡拾询问信号。③依据每副B 型天线接收到的信号强度,目标船可测定追踪船方向,并使目标船窄波束天线(D 型)恰当定向。
(2)追踪船向目标船的逼近。两艘飞船相互对准后,“指针”系统开始支持两艘飞船靠近。①首先,目标船关闭全向天线(A型),但继续通过旋转天线(B型)接收来自追踪船的询问信号,并通过固定窄波束天线(D 型)重新发送询问信号。②追踪船的万向架固定式天线(C 型)捡拾目标船发送的重播信号,船上计算机应用这些观测值确定测距、测距变化率及视线矢量的转动。③在近距离,追踪船上的E型天线将向目标船上的B 型天线发送询问信号,以帮助测定滚转基准。在追踪船缓慢靠近目标船的过程中,应用控制定律使视线转动为零,且使相对距离变化率(测距率)按所期望的函数关系随相对距离(测距)变化,直到对接完成。对于联盟-4 交会使命,联盟-4逼近联盟-5的速度为25cm/s。图17表示追踪船与目标船在远距逼近阶段的相对位置。
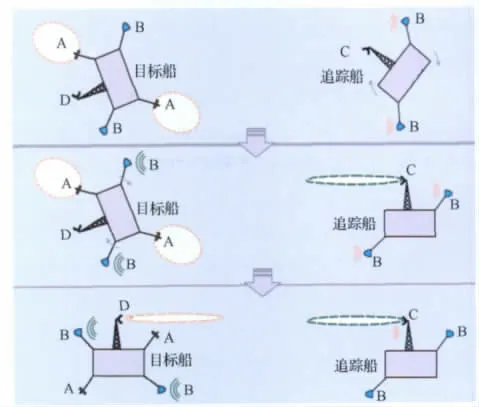
图16 “联盟”飞船应用“指针”系统的相互搜寻与捕获[26]Fig.16 Mutual search and acquisition of two Soyuz spacecraft using Igla system
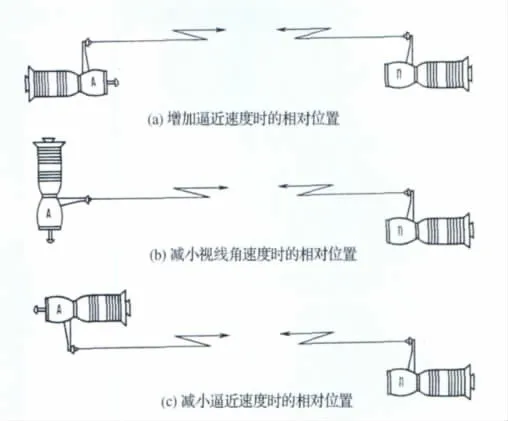
图17 应用“指针”系统的“联盟”追踪船与目标船在远距交会阶段的相对位置[9]Fig.17 Mutual position of the active and passive spacecraft in the distant approach phase using Igla system
3.2 “航向”雷达系统[9,22-24]
“航向”雷达系统用于联盟-TM 与进步-M,以及后续的联盟号与进步号飞船。“航向”系统可以使追踪器逼近飞行到所选择的目标器对接口的对接轴线上。类似“指针”系统,“航向”系统在联盟号和进步号飞船(主动追踪器)与空间站(被动目标器)上应用多种类型天线。追踪器上的“航向”系统为主动“航向”(Kurs-A)系统,目标器上的“航向”系统为被动“航向”(Kurs-P)系统。如图18所示,在“国际空间站”的“纵码头”(Pirs)对接舱(也是气闸舱)上,既装备主动“航向”系统,又有被动“航向”系统,这是因为在向“国际空间站”上装配“纵码头”时,“纵码头”是逼近“国际空间站”的“追踪器”,而飞船向“纵码头”逼近对接时,“纵码头”是“目标器”。图19 显示了“国际空间站”储货功能块(Functional Cargo Block,FCB)“航向”系统天线锥。
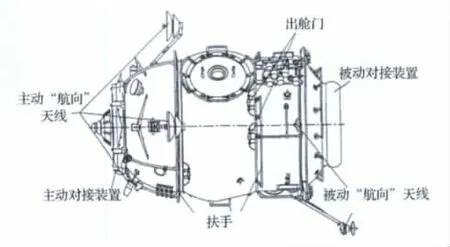
图18 “国际空间站”的“纵码头”对接舱(气闸舱)[9]Fig.18 Pirs docking and airlock module installed on ISS

图19 “国际空间站”储货功能块“航向”系统天线锥(右侧视图)[28]Fig.19 ISS FCB Kurs antenna cones(starboard view)
联盟号飞船上有4种天线(见图20):①两副全向转移接收天线,一副(A1)安装在前部对接口,另一副(A2)在飞船后侧,用于捕获段,确定目标器(空间站)的大致方向。一旦空间站确定被捕获,联盟号飞船便开始发射并接收信号,测定相对距离与距离变化率。②万向架固定式宽角天线(A3),用于联盟号飞船向空间站逼近的定位。③固定的电子扫描天线(A4,与“指针”系统的C型天线相似)。④固定的窄波束接收天线(A5),用于在近距离邻近段测量朝向目标器的方向角,并测定相对姿态。
在联盟号飞船与和平号空间站交会使命中,和平号空间站上也有4种天线(见图20):①两副全向收发天线(B1与B2),安装在太阳翼外端,最初用于向联盟号和进步号飞船播送标向信号,向飞船警示空间站所处位置。②30°锥固定天线(B3),用于确定测距和测距率。③20°锥固定天线(B4),主要用于最后30m,以提高相对距离测量精度。④锥形扫描天线(B5),该天线由电机驱动,固定转速为700r/min。天线B3、B4、B5主要在邻近段应用。当天线B1和B2被关闭时,应用天线B3测定相对距离及其变化率。通过测量天线A5收到的B5发送的振幅和相位转移载波信号,联盟号飞船可测定它与空间站之间的相对姿态。图21表示联盟号飞船与和平号空间站应用“航向”系统的相互搜寻与捕获。
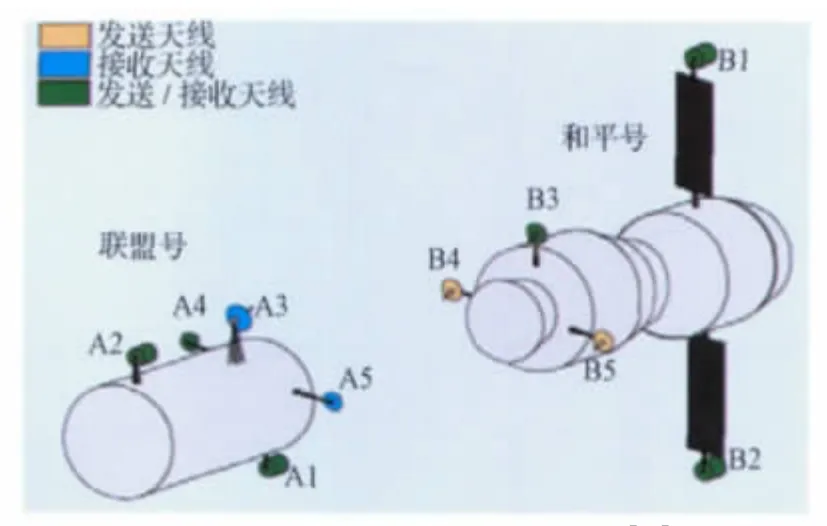
图20 “航向”系统射频天线[26]Fig.20 RF antennas of Kurs system
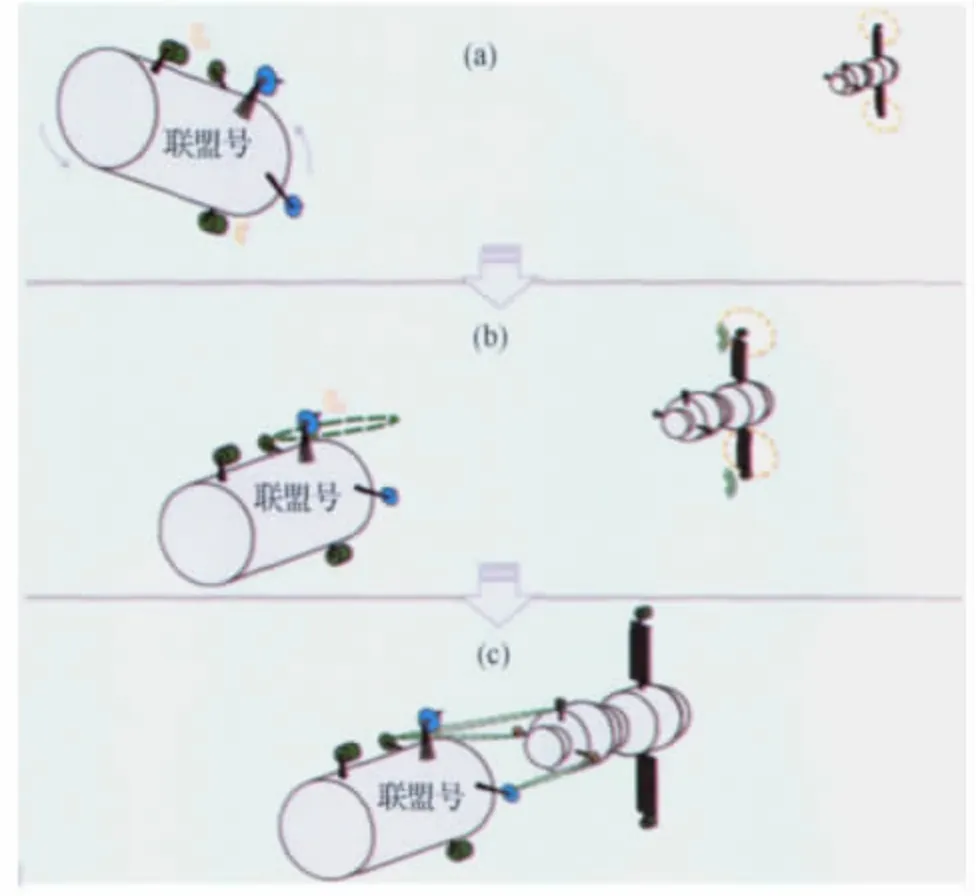
图21 联盟号飞船与和平号空间站应用“航向”系统的相互搜寻与捕获[26]Fig.21 Mutual search and acquisition of Soyuz spacecraft and Mir space station using Kurs system
“航向”系统也有能力使联盟号飞船与无应答的空间站对接,这种能力在联盟TM-21使命中得到验证。美国航天飞机在完成首次与和平号的对接后,准备解除对接,苏联人认为这是一个历史性事件,要拍摄下航天飞机的离开,因此必须将联盟号飞船解除对接并移往可记录这一事件的位置。脱离对接后,联盟号飞船试图与和平号空间站再对接,而此时空间站计算机失效,幸好有联盟-TM的“航向”系统,使飞船向计算机失效的空间站对接得以实现。对接后,航天员进入空间站,重新启动计算机。
与“指针”系统相比,“航向”系统具有两方面优势:①“指针”系统作用距离仅几十千米,而“航向”系统可在相对距离几百千米范围内捕获目标。②如图16与图17所示,“指针”系统在对准之后才能进行逼近运作,即两个航天器的对接面之间保持视线瞄准。为实现“对准”,就需要目标器参与姿态机动,或追踪器跟踪目标器的对接口。若目标器质量较小(如卫星或飞船),姿态机动不难实现;若目标器质量较大(如空间站),姿态机动不易实现,在这种情况下,追踪器不得不绕飞跟踪目标器的对接口。相比之下,“航向”系统可补偿目标器意外的偏离,支持与非机动目标器的交会对接运作,动力消耗较小。
“航向”系统的运作一直很成功,几乎将雷达导航系统的功能发挥到了极致,但在质量、电源和设计方面还有一些不足之处。在联盟号或进步号飞船上的“航向”系统,总质量约85kg,功率为270W。在目标器上,“航向”系统,总质量约80kg,功率为250W。此外,“航向”系统采用存在寿命问题的真空管技术。尽管这个系统在当前的应用是有效的,并且还可能持续多年,但目前的设计难以满足自主轨道交会使命提出的许多新需求。
3.3 “遥控操作交会单元”[29]
在和平号空间站上也装备“遥控操作交会单元”,使空间站核心舱内的航天员可遥控进步号货运飞船的逼近与对接。空间站航天员可应用一对安装在主控板上的手控器,控制进步号飞船的转动与平移,操作方式如同联盟号载人飞船乘员使用的手控器。在进步号飞船的对接单元中有一台摄像机,可将飞船逼近空间站的现场TV 图像,传送到空间站内航天员前面的监视屏上,对飞船运动进行控制。1992年,这个系统在进步M-15上进行试验。1997年6月,这个系统的运作对避免进步M-34 飞船与和平号空间站碰撞起到了作用。
4 交会逼近轨迹
对航天器交会逼近飞行,可以应用惯性坐标系描述目标器与追踪器的轨道运动(绝对运动),更常用的是,在“当地垂直/当地水平”(Local-Vertical Local-Horizontal,LVLH)坐标系中描述追踪器相对目标器的运动,即相对运动。LVLH 坐标系(见图22)的xz 平 面为 目 标 器 轨 道 面,z 轴(Rbar)指向地球中心,x 轴(V-bar)指向目标器轨道运动方向,y轴(H-bar)垂直于轨道面(沿负法向)。在LVLH 坐标系中,联盟号(或进步号)飞船向和平号空间站交会对接飞行轨迹如图23所示;图24则表示进步M-11M 飞船向“国际空间站”交会逼近的轨道运动。整个交会逼近轨迹可分为三部分:①交会段;②逼近与制动段;③最终逼近段。交会逼近应用“航向”系统,并采用双共椭圆轨道与绕飞策略。所谓“共椭圆轨道”,是指共面、共中心的椭圆轨道,即两椭圆轨道的轨道倾角相同,且半长轴与偏心率的乘积相等。共椭圆轨道在LVLH 坐标系中的轨迹近似为平行于V-bar轴的直线。
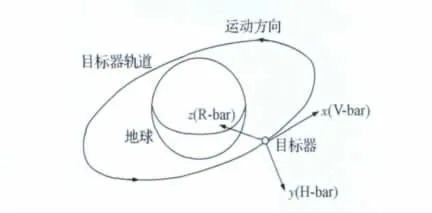
图22 标准“当地垂直/当地水平”坐标系[25]Fig.22 Standard LVLH frame
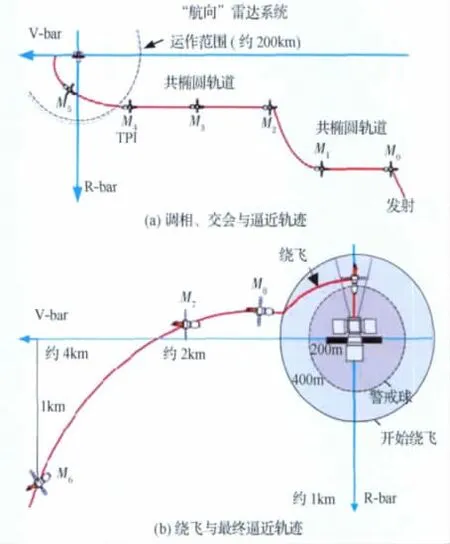
图23 联盟号(或进步号)飞船与和平号空间站的交会对接飞行轨迹[26]Fig.23 Rendezvous and docking trajectory for Soyuz/Progress spacecraft to Mir space station
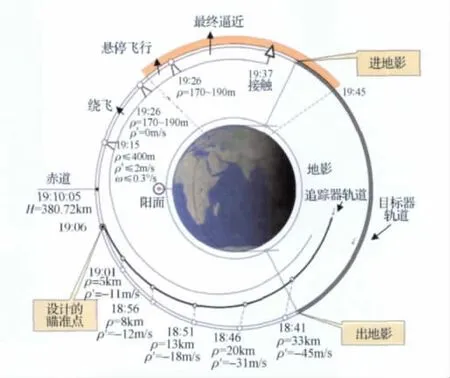
图24 进步M-11M 向“国际空间站”的接近与逼近[23]Fig.24 Closing and approach of Progress M-11Mto ISS
4.1 交会段[26,30]
交会段由初始轨迹射入点(M0)至“终段起始”(Terminal Phase Initiation,TPI)点(M4)。在发射及初始轨道射入机动(点M0)后,执行两个机动(点M1和点M2),将联盟号或进步号飞船转移到调相高度,进入共椭圆轨道。在漂移期间,施加轨迹修正机动(点M3),减小轨迹弥散。从M0处的机动到M3处的机动都是由地面控制的。当向和平号空间站转移的TPI时刻到来时,飞船上的控制系统执行终段起始机动(点M4),开始向空间站逼近。
4.2 逼近与制动段[26,30]
逼近与制动段由TPI(点M4)至到达对接轴线,这一段也称为“向对接轴转移”段。在TPI机动后不久,联盟号飞船离和平号空间站约200km时,飞船进入“航向”系统运作范围,“航向”系统开始空间站的搜寻与捕获。空间站由全向天线(B1与B2)发送标向信号,而联盟号和进步号飞船前部对接口天线(A1)及后侧天线(A2)可探测到这些警示信号,并最终测定空间站定位在哪个半球。如需要,飞船可启动姿态机动,以保证飞船恰当指向空间站方向(见图21(a))。一旦“航向”系统得知空间站位于地球哪个半球且飞船被恰当定位后,飞船上的扫描天线(A3)便被激活,可以更精确地测定空间站方向。最终,联盟号相对空间站的距离和方位足以允许主跟踪天线(A4)查寻空间站,以获取相对距离及其变化率信息。依据天线A4获取的附加信息(见图21(b)),“航向”系统可更新两个航天器的测算位置,并在距空间站约100km 处执行逼近轨迹修正机动(M5),如图23(b)所示。
在向和平号空间站逼近时,为使制动过程平稳,施加3个冲量机动(点M6,M7,M8)。第一个制动机动(点M6)出现在联盟号在空间站轨道之下约1km、空间站之后约4km 的位置。在最后一次制动机动(点M8)之后,很可能当前的逼近轨迹与空间站的对接口尚未对准。因此,为使飞船在最终逼近段沿空间站对接轴以适合的相对状态向空间站逼近,联盟号飞船在离空间站200~400m 之间进行绕飞。不管对接轴指向是否沿V-bar、R-bar,或某惯性固定轴,联盟号可通过绕飞到达对接轴线上。在绕飞期间,联盟号上的扫描天线(A4)跟踪空间站天线B3,以获得测距、测距率及视线角信息;与此同时,天线A5 跟踪B5,以推断相对姿态(见图21(c))。绕飞后,飞船到达对接轴线上并保持在一个固定的相对位置(悬停飞行),离空间站约200m;在此位置,飞船等待地面执行最终逼近的“前进”指令。
4.3 最终逼近段[12,23,26,30]
最终逼近段为沿对称轴线逼近空间站的飞行阶段。飞船一旦接收到“前进”指令信号,便开始向空间站最终逼近。最终逼近轨迹为直线型闭环受控轨迹,初始接近速度为1m/s。当相对距离降到30m以下时,联盟号上的天线A4开始接收经空间站天线B4发送的信号(除来自天线B3的信号外),继续估算相对距离(图21(c))。在接触前,逼近速度大致降到0.1~0.3m/s;侧向偏差为0.15~0.30m,侧向速度小于0.1m/s;滚转角速度保持在0.7(°)/s以下,俯仰与偏航角速度(合计)小于0.6(°)/s。
5 对接系统
5.1 “联盟”飞船之间的对接[8]
苏/俄航天器对接系统的最原始设计源自“联盟绕月飞行器”。“联盟绕月飞行器”的载人飞船联盟-A与加注飞船联盟-V 的对接系统设计采用简单的杆锥装置,且不提供内部转移舱门。由联盟-A演变而来的“联盟”飞船也沿用杆锥设计,主动飞船装备探杆,而被动飞船有接收锥、锥套及捕获锁。为了接收探杆,被动单元的截头锥体比主动单元更长。探杆设计为减震器,探杆顶端的敏感器用于探测与被动锥的接触,并使主动飞船上的控制系统失效;同时,主动飞船推力器点火,将两艘飞船连在一起。在被动锥的顶点,探杆碰撞锥套,锥套内的系列捕获锁与约束环锁在一起,使两艘飞船紧固。在两艘飞船对接单元的边框上,凸凹构型的嵌入插头与插座在飞船之间建立起电气与通信连接。
5.2 联盟号和进步号飞船与苏联空间站的对接[8]
从1971年起,执行空间使命的联盟号载人飞船与进步号货运飞船的杆锥对接系统作了改进,杆锥装置在硬对接实现后可移开,并增设内部转移舱门。对接后,一旦完成压力与密封完整性检测,航天员便可移开杆锥装置并打开两个航天器之间的舱门,形成从联盟号和进步号飞船进入空间站的通道。为解除对接,杆锥单元将被放回原位,关闭舱门,4 根弹簧推杆将两个航天器推开。如果因某种原因推杆失效,航天员可点火爆炸螺栓,将飞船从空间站分离;若还不行,作为最后的努力,推进舱与下降舱组合体将从轨道舱分离,并立即返回地球。
5.3 联盟号飞船与“阿波罗”飞船的对接[8,12]
为1975年的联盟号与“阿波罗”飞船联合飞行,需研发不同的对接系统。为补偿两艘飞船之间气压的变化,美国研制了“对接舱”,并为实现对接共同研发了“雌雄同体(异体同构)周边装配系统1975”(Androgynous Peripheral Assembly System 1975,APAS-75),见图25。这个对接单元安装在对接舱的联盟号一端,使联盟号与“阿波罗”飞船的对接舱对接。联盟号与对接舱之间的相容性是由安装相互连接并制约的标准件实现的。此外,一个装配式T型对接目标(曾在“阿波罗”月球舱上使用过)安装在联盟号对接装置上,通过“阿波罗”指令与服务舱光学瞄准观测器件可观测到T 型对接目标,这个观测器件与指令舱前向交会窗相邻。联盟-19飞船也装备2个闪光标志灯,用于最终逼近期间的视觉捕获;在太阳翼外侧有4个定向灯,左侧前向灯为红色,右侧前向灯为绿色,2个尾灯为白色。
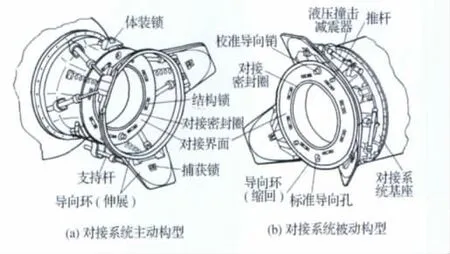
图25 “阿波罗”与联盟-ASTP对接系统[12]Fig.25 Docking system of Apollo and Soyuz-ASTP spacecraft
5.4 “国际空间站”对接系统[12,22,31-33]
除了美国的“通用停靠机构”(Common Berthing Mechanism,CBM)外,在“国际空间站”上还应用两类俄罗斯对接系统:①“雌雄同体(异体同构)周边连接系统”(Androgynous Peripheral Attachment System,APAS)对接机构(见图26);②杆锥对接机构(见图27)。美国的“通用停靠机构”需要乘员操作自动臂,不支持自动对接运作。与“通用停靠机构”不同的是,俄罗斯对接机构无需乘员操作,支持自动对接运作;但这两类对接机构都不是为停靠运作而设计的,这是因为它们需要较大的接触力和接近速度,以克服航天器对准误差,实现连接软捕获。俄罗斯的这两类对接机构都提供双电机钩形驱动装置,并带有火工备份,用于分离操作;然而,火工释放使一个航天器的联接系统不能为以后对接使用(只有大修后才可重新使用)。类似的,应急96-螺栓用于“雌雄同体周边连接系统”释放,也使“国际空间站”对接口不能重复使用。典型的联盟号飞船与“国际空间站”的对接程序如图28所示。

图26 俄罗斯“雌雄同体(异体同构)周边连接系统”对接机构[31]Fig.26 Russian androgynous peripheral attachment system docking mechanism
图27 俄罗斯“联盟杆锥对接机构”[31]Fig.27 Russian Soyuz probe/cone docking mechanism
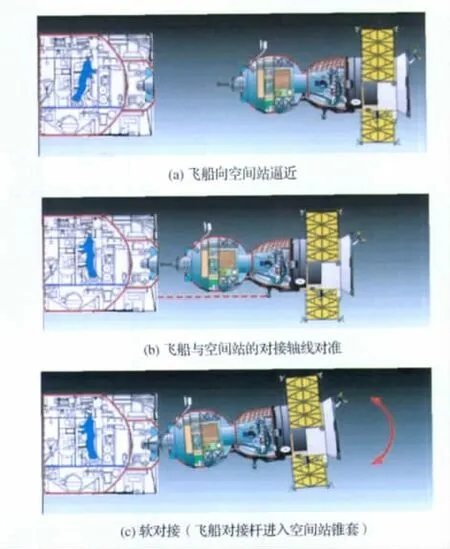
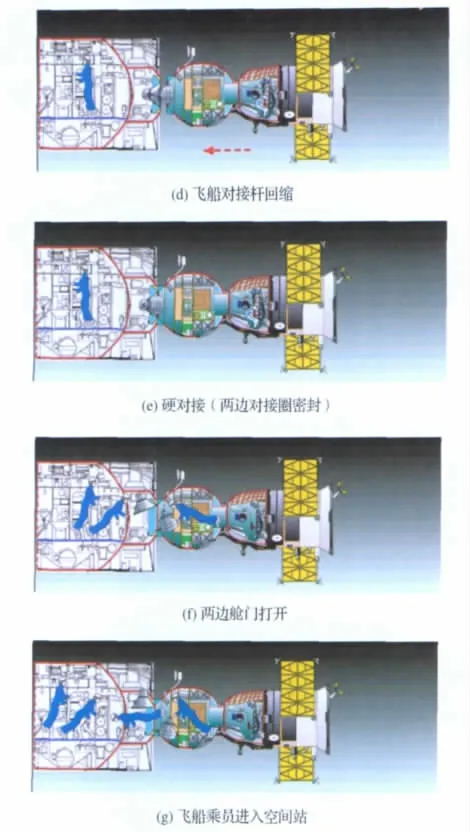
图28 联盟-TMA与“国际空间站”的对接程序[33]Fig.28 Soyuz-TMAdocking sequence
6 俄罗斯未来的空间运输系统
2009年,俄罗斯揭示了未来的空间运输系统,这项规划名为“未来有人操作的运输系统”(Prospective Piloted Transport System,PPTS),计划于2018年进行首次载人发射。整个“未来有人操作的运输系统”规划包括两部分:①“新一代有人操作的运输飞行器”(New Generation Piloted Transport Spacecraft,PTK NP);②“新一代有人操作的运输飞行器”的运载火箭,即Rus-M 系列火箭。
6.1 Rus-M 系列火箭[13]
Rus-M 系列火箭第一级应用RD-180发动机,第二级应用RD-0146发动机。Rus-M 有4个型号:①型号-1 的第一级应用3个不可分离的助推器。②型号-2的第一级应用5个助推器,其中4个搭接的周边助推器在飞行中脱离掉,而中央助推器工作时间较长。在飞行初期阶段,中央助推器推力小于满推力,在4个周边助推器分离后,中央助推器达到推力极限。③型号-3应用加长的第一级,以增加推进剂质量。④型号-4的第一级为单一助推器,而上面级来自联盟-2火箭。型号-1~3的低地球轨道运载能力分别为23.8t、35t、50t,主要用于载人使命;型号-4的低地球轨道运载能力为6t,可用于货物运输使命。图29分别表示Rus-M 系列火箭的前3个型号。

图29 Rus-M 系列火箭型号[13]Fig.29 Family of Rus-M rocket
6.2 新一代载人飞行器[14-16]
“新一代有人操作的运输飞行器”将取代历史悠久的联盟号载人飞船。它有3 种类型(见图30):①地球轨道飞行器,质量约12t,乘员6人,载货质量500kg,自主使命飞行期可达30 天,在与“国际空间站”或未来俄罗斯空间站对接状态下的飞行期可长达1年。②月球轨道飞行器,质量约16.5t,乘员4人,载货质量100kg,可执行长达14天的绕月飞行使命,在与月球轨道站对接状态下的飞行期可长达200 天。③地月转移飞行器,具有助推级,用于飞离地球引力场,到达月球轨道。此外,“新一代有人操作的运输飞行器”也可改型为不载人的货运飞船。
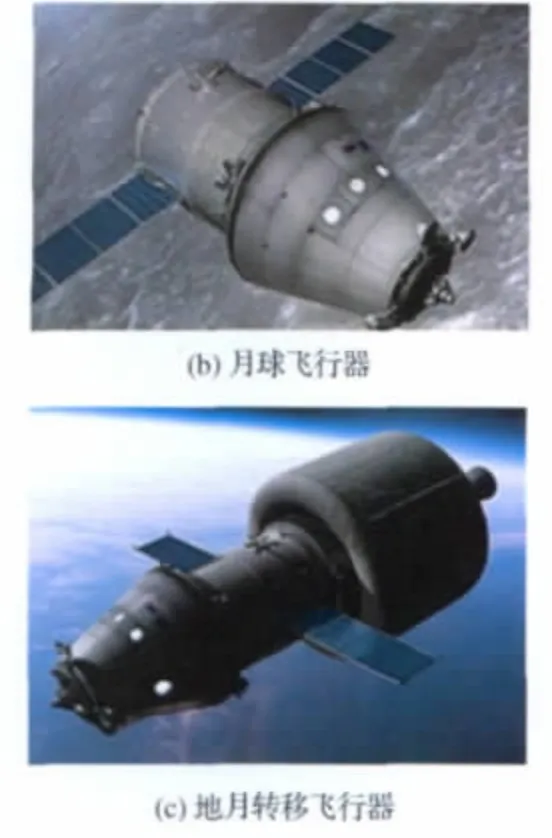
图30 “新一代有人操作的运输飞行器”的类型[14]Fig.30 Versions of PTK NP spacecraft
“新一代有人操作的运输飞行器”的地球轨道飞行器(见图30(a)和图31)为两舱构型,即仅由乘员舱与服务舱组成,没有轨道舱。这是因为它仅在地球与空间站之间运输乘员,不承担单飞在轨科学实验任务,因此无需轨道舱,且可扩充乘员舱,载运6名乘员。在乘员舱顶端有对接装置,在乘员舱后部有软着陆发动机与着陆架,姿控推力器安装在乘员舱前部外壁上,在乘员舱内部有乘员进入空间站的转移通道。服务舱内有推进剂贮箱,服务舱外壁上装有一对可转动的太阳翼。
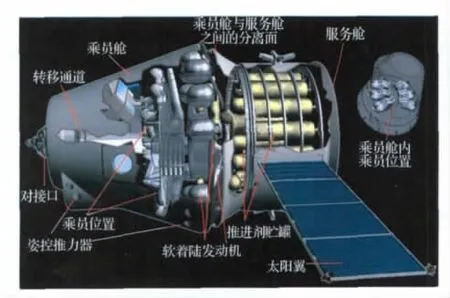
图31 PTK NP地球轨道飞行器剖视图[16]Fig.31 Acutaway drawing of earth-orbiting version of PTK NP spacecraft
在2009年8月莫斯科航空航天展上展示了“新一代有人操作的运输飞行器”模型,可以看出它的一些特点:①新飞行器乘员舱上有可重复使用的防热瓦,代替烧蚀材料系统。(值得注意的是,当美国抛弃防热瓦重新使用烧蚀材料防热系统时,俄罗斯却想使用防热瓦,使乘员舱可重复使用。也许俄罗斯认为,现在已不同于30年前,防热瓦的技术成熟度可满足载人航天器要求。)②应用可转动的太阳翼代替固定的太阳翼。太阳翼的精确对日定向,连同使用高效太阳电池与新一代锂蓄电池,新一代飞船的电源系统将比联盟号飞船有更高的性能。③在飞行器模型上未见传统的轨道交会天线,而是让位给致密的敏感器,很可能使用激光敏感器导引飞行器对接。④新飞行器也将应用新的高性能飞行控制计算机,有能力接收并处理GLONASS卫星网的导航数据以及来自高精度陀螺仪与光学敏感器的信息。⑤在服务舱尾部的专用可移动天线,使飞行器可经由数据中继卫星与地面控制保持不间断的联系。⑥飞行器与地球之间的双路通信将被统一为单一的稳固的数字化数据流,适应快速解码、配送与存储。⑦乘员舱将装备液晶显示器与定制的软件。⑧在乘员舱顶端有气动力活板;当乘员舱离轨到达稠密大气层时,活板可用于操控乘员舱。⑨乘员舱装备推力器,应用气态氧与乙醇作推进剂,用于大气层外的机动。
7 结束语
在美国成功完成“阿波罗”登月使命后,苏联立即停止登月计划,将空间活动重点转向空间站与运输飞船系列。历经40多年的发展,联盟号飞船已成为历史悠久且可靠、高效的载人飞船系列,并衍生出进步号货运飞船系列。联盟号和进步号飞船具有下列特点:①在世界上首次采用3舱(下降舱、轨道舱与推进舱)构型,且下降舱应用烧蚀防热结构,轨道舱兼作气闸舱。②应用交会雷达系统,以自动控制为主,特别是“航向”系统最大限度地提升了雷达导航系统的功能;而手控器与“遥控操作交会单元”可在应急情况下使用。③不断改进的杆锥对接系统成功应用在联盟号载人飞船、进步号货运飞船,以及欧洲航天局“自动转移飞行器”的对接运作中。④新设备、新系统在联盟号载人飞船试验前,先在无人航天器上进行试验。在进步号货运飞船之前,应用宇宙号飞船(实际上就是不载人的联盟号飞船,除用作技术试验外,本身具有军事探测目的);在进步号货运飞船服役后,应用进步号系列进行试验。⑤最初的联盟号飞船具有运载乘员与货物双重使命,但随着货运量的增大,将载人飞船与货运飞船分开,且将进步号飞船作为联盟号载人飞船的技术试验平台。
纵观半个世纪以来苏/俄的空间活动,可以看到苏/俄在载人飞船、货运飞船、空间站,以及与之有关的舱外航天服[34]等领域,取得令人瞩目的成就。苏/俄联盟号飞船技术对欧洲航天局、日本、中国的空间运输系统的研制具有重要影响;苏/俄在空间站技术领域取得的经验,对空间探测及后来“国际空间站”的组装与运作具有重要作用;苏/俄舱外航天服技术对欧洲航天局、中国、美国的舱外航天服的研制具有借鉴作用。俄罗斯的航天技术不仅在苏联航天技术的基础上向前发展,而且对国际合作作出突出贡献。
现在,俄罗斯已提出“未来有人操作的运输系统”规划,包括更大推力的Rus-M 系列火箭与“新一代有人操作的运输飞行器”。这项规划不仅可显著提高俄罗斯的地球轨道运输能力,而且为俄罗斯未来的载人登月与载人登火星使命开辟道路。
(References)
[1]朱仁璋.航天器交会对接技术[M].北京:国防工业出版社,2007
Zhu Renzhang.Rendezvous and docking techniques of spacecraft[M].Beijing:National Defense Industry Press,2007(in Chinese)
[2]Fehse W.Automated rendezvous and docking of spacecraft[M].Cambridge:Cambridge University Press,2003
[3]朱仁璋,王鸿芳,徐宇杰,等.ATV交会飞行控制策略研究[J].航天器工程,2011,20(1):22-24
Zhu Renzhang,Wang Hongfang,Xu Yujie,et al.Study of flight control strategy for the ATV rendezvous mission[J].Spacecraft Engineering,2011,20(1):22-24(in Chinese)
[4]朱仁璋,王鸿芳,徐宇杰,等.从ETS-VII到HTV——日本交会对接/停靠技术研究[J].航天器工程,2011,20(4):6-31
Zhu Renzhang,Wang Hongfang,Xu Yujie,et al.From ETS-VII to HTV:study of Japanese rendezvous and docking/berthing technologies[J].Spacecraft Engineering,2011,20(4):6-31(in Chinese)
[5]朱仁璋,王鸿芳,徐宇杰,等.美国航天器交会技术研究[J].航天器工程,2011,20(5):11-36
Zhu Renzhang,Wang Hongfang,Xu Yujie,et al.Study on rendezvous techniques of American spacecraft[J].Spacecraft Engineering,2011,20(5):11-36 (in Chinese)
[6]朱仁璋,王鸿芳,王晓光,等.舱外活动气闸技术综述[J].载人航天,2008,14(2):12-23
Zhu Renzhang,Wang Hongfang,Wang Xiaoguang,et al.Overview of EVAairlock techniques[J].Manned Spaceflight,2008,14(2):12-23(in Chinese)
[7]朱仁璋,王鸿芳,泉浩芳,等.载人航天器操作器系统述评[J].载人航天,2009,15(4):11-25
Zhu Renzhang,Wang Hongfang,Quan Haofang,et al.Areview of manipulator systems onboard manned spacecraft[J].Manned Spaceflight,2009,15(4):11-25(in Chinese)
[8]Gass R.Abrief history of the Soyuz spacecraft[R/OL].[2011-09-27].http://www.interspacenews.com/FeatureArticle/tabid/130/Default.aspx?id=1046
[9]Hall R D,Shayler D J.Soyuz:a universal spacecraft[M].Chichester:Praxis Publishing,2004
[10]Brichant AL.Press-conference on the fight of spaceships“Soyuz-4”and“Soyuz-5”,NASACR-73752[R].Greenbelt:NASAGoddard Space Flight Center,1969
[11]Siddiqi AA.Soyuz variants:a 40-year history[J].Spaceflight,2003,45(3):2-5
[12]MSFC History Office.Apollo-Soyuz test project[R/OL].[2011-10-04].http://history.msfc.nasa.gov/apollo/docs/Apollo-Soyuz_Press_Kit.pdf
[13]Zak A.Launch vehicle for PPTS spacecraft[R/OL].[2011-09-27].http://www.russianspaceweb.com/ppts_lv.html
[14]Zak A.Prospective piloted transport system,PPTS/ACTS[R/OL].[2011-09-27].http://www.russianspaceweb.com/ppts.html
[15]Zak A.PTN NP project development in 2011[R/OL].[2011-09-27].http://www.russianspaceweb.com/ptk_np_2011.html
[16]Zak A.PTN NP(PPTS/ACTS)[R/OL].[2011-09-27].http://www.russianspaceweb.com/acts.html
[17]Viehbock R.Soyuz-the Russian human transportation vehicle,AIAA94-4604[R].Washington:AIAA,1994
[18]S.P.Korolev Rocket and Space Corporation.The Soyuz TMAmanned transport spacecraft[R/OL].[2011-09-27].http://www.energia.ru/en/iss/soyuztma/soyuz-tma.html
[19]S.P.Korolev Rocket and Space Corporation.Soyuz TMA-M manned transport vehicle of a new series[R/OL].[2011-09-27].http://www.energia.ru/en/iss/soyuz-tma-m/soyuz-tma-m.html
[20]Zak A.Soyuz TMA-M[R/OL].[2011-09-27].http://www.russianspaceweb.com/soyuz_tma_m.html
[21]Zak A.Soyuz TMA-01M[R/OL].[2011-09-27].http://www.russianspaceweb.com/iss_soyuz_tma01m.html
[22]Wikepedia.International Space Station [R/OL].[2011-09-27].http://en.wikipedia.org/wiki/International_Space_Station
[23]MKC.Пpe.orpree M-11M[R/OL].[2011-09-27].http://www.mcc.rsa.ru/progress_m11m.htmA
[24]Zak A.Progress cargo ship[R/OL].[2011-09-27].http://www.russianspaceweb.com/progress.html
[25]Zak A.Progress M-M cargo ship[R/OL].[2011-09-27].http://www.russianspaceweb.com/progress_m_0m.html
[26]Woffinden D C,Geller D K.Navigating the road to autonomous orbital rendezvous[J].Journal of Spacecraft and Rockets,2007,44(4):7-8
[27]Hinman E M,Bushman D M.Soviet automated rendezvous and docking system overview,N93-22265[R].Huntsville:NASAMashall Space Flight Centre,1993
[28]Gebhardt C.Soyuz TMA-17arrives as ISS and SSP evaluate dual-docked ops scenarios[R/OL].[2011-10-04].http://www.nasaspaceflight.com/2009/12/soyuz-tma-17-arrives-iss-ssp-evaluate-dual-docked-ops-scenarios/
[29]Bergin C.Russian Progress successfully docks with ISS at the second attempt[R/OL].[2011-09-27].http://www.nasaspaceflight.com/2010/07/live-russian-progress-second-docking-attempt-iss/
[30]González R,Culp R D.Investigation of an rbar/cusp approach for Russian rendezvous to space station Alpha[J].Spaceflight Mechanics,1995,89(2):13-16
[31]Machula M F,Sandhoo G S.Rendezvous and docking for space exploration,AIAA2005-2716[R].Washington:AIAA,2005
[32]Zimpfer D,Kachmar P,Tuohy S.Autonomous rendezvous,capture and in-space assembly:past,present and future, AIAA2005-2523 [R].Washington:AIAA,2005
[33]RuSpace.Soyuz TMAorbit profile[R/OL].[2011-09-27].http://suzymchale.com/ruspace/soyorbit.html
[34]朱仁璋,王鸿芳,王晓光,等.苏/俄舱外航天服技术的进展[J].载人航天,2009,15(1):25-45
Zhu Renzhang,Wang Hongfang,Wang Xiaoguang,et al.Advances in the Soviet/Russian EVAspacesuit technology[J].Manned Spaceflight,2009,15(1):25-45(in Chinese)
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
军事文摘(2022年8期)2022-05-25
新世纪智能(高一语文)(2021年3期)2021-07-16
军事文摘(2020年24期)2020-02-06
军事文摘(2019年18期)2019-09-25
民用飞机设计与研究(2019年4期)2019-05-21
当代水产(2019年1期)2019-05-16
电子制作(2017年24期)2017-02-02
太空探索(2016年9期)2016-07-12
创业家(2015年1期)2015-02-27