
一类4维Lotka-Volterra系统的Hamilton结构及动力学*
2011-12-17 09:10赵晓华戴灿华
浙江师范大学学报(自然科学版) 2011年3期
赵晓华, 戴灿华
(浙江师范大学数理与信息工程学院,浙江金华 321004)
0 引言
本文涉及的Lotka-Volterra系统是指下面的常微分方程组:

式(1)中:xj表示第j个物种的种群密度;A=(ajk)称为作用矩阵,表示物种间的相互作用关系;εj是与环境相关的参数.
自19世纪20年代Lotka和Volterra分别在研究化学反应和生物问题时提出上述Lotka-Volterra(LV)系统以来,方程组(1)已经被广泛应用于物理、化学、生物、动态博弈论、经济和其他的社会科学中,成为应用数学领域中一个重要的微分方程模型,还被应用于许多热门学科,如神经网络、生物反应、细胞演化和病毒传播等[1-6],LV系统受到数学及其他学科领域的关注越来越多.在过去的80多年里,对LV系统的理论及应用研究成果大量涌现[7-8].
但是,除了2维的Lotka-Volterra系统的动力学性质和一些特殊类型的高维Lotka-Volterra系统已分析清楚外,一般的高维Lotka-Volterra系统的动力学性质还远远没有弄清楚,有待深入研究.
研究表明,Lotka-Volterra系统的动力学性质和它的作用矩阵的代数性质有着密切的关系.根据作用矩阵A的不同性质,Lotka-Volterra系统可分为3类[5](定义1).
定义1 具有作用矩阵A=(aij)的Lotka-Volterra系统称为:
1)合作型(或竞争型),如果对任意 i≠j,aij≥0(aij≤0);
2)保守型,如果存在一个正对角矩阵D>0,使得AD是反对称的;
3)耗散型,如果存在一个正对角矩阵D>0,使得在二次型意义下AD≤0.
对于耗散型系统,考虑到模型的实际应用,更值得研究的是稳定耗散系统,即作用矩阵A及其对非零元素的小扰动所得的矩阵˜A均为耗散型.
以往的研究主要涉及合作(或竞争)型LV系统,对保守型和耗散型系统的研究相对较少[5-7].其中特别值得注意的是1998年Duarte等在文献[5]中对这两类系统的研究,他们证明:保守型LV系统若存在正平衡点,则它具有广义Hamilton结构,可以表示为Poisson流形上的广义Hamilton系统;而具有正平衡点的稳定耗散LV系统存在一个整体吸引集,其上的动力学控制方程是一个较低维数的具有广义Hamilton结构的保守型LV系统.关于Hamilton和广义Hamilton系统的相关知识可参阅文献[9-10].
根据Duarte等的这些结论可以得出,若这个吸引集是单点集,则原LV系统是全局渐进稳定的;若吸引集不是单点集,则需进一步研究吸引集上的子系统的轨道性质.因此,为了弄清稳定耗散系统在吸引集上的动力学性质,本质上就是要研究具有广义Hamilton结构的保守型LV系统的动力学性质.
本文研究了一类具有广义Hamilton结构的4维保守型LV系统,这个系统包含至少3族周期轨道,而对一般的参数是不可积的,并且会出现Hamilton混沌.进而也表明:一般而言,稳定耗散LV系统吸引集的结构可能非常丰富而复杂,值得深入系统地研究.
1 Hamilton结构及平衡点稳定性分析
本文考虑如下的4维Lotka-Volterra系统:
对应的作用矩阵为
式(3)中:已被标出的元素aij≠0;aijaji<0.考虑到系统(2)的特殊结构及实际应用背景,只对不变区域
在假设条件aijaji<0下,系统(2)实际上是一个保守型系统,因为可取对角矩阵D=diag(d1,d2,d3,d4)的对角元素为

则可使DA为反对称矩阵.进一步,容易验证变换xj→djxj保持系统(2)的形式不变,但作用矩阵变为DA,为反对称矩阵.
因此,不失一般性,直接假定系统(2)的作用矩阵(3)满足以下条件:

容易验证,若参数 bj(j=1,2,3,4)满足条件

则系统(2)存在唯一正平衡点

另一方面,在光滑函数空间C∞(R4+)上定义Poisson括号{·,·}为

式(8)中,A=(ajk)是满足条件式(5)的系统(2)的作用矩阵.根据辛流形及其上定义的Hamilton系统的理论[9],直接验证可知{R4+,{·,·}}构成一个4维辛流形,并且有命题1成立.
命题1 在假设式(5)和式(6)成立的情况下,LV系统(2)是4维辛流形{R4+,{·,·}}上的 Hamilton系统,可将系统(2)改写为如下Hamilton形式:

作为Hamilton系统的重要性质之一,Hamilton函数H(x)是LV系统(2)的首次积分,即H沿着系统DH(q)=0,并且Hess矩阵D2H(q)正定,从而根据Dirichlet稳定定理[10]可证得命题2.
命题2 在假设式(5)和式(6)成立的条件下,LV系统(2)的正平衡点q是Lyapunov稳定的.
最后,利用 Morse引理[11]得:对任意 h>0,水平集 Mh={x∈R4+|H(x)-H(q)=h}拓扑等价于一个3维球面S3.
2 周期轨道
为进一步研究系统(2)的周期解,先介绍下面的Lyapunov中心定理[10].
引理1(Lyapunov中心定理) 设(M,Ω)是一个2n维辛流形,XH是定义在M上的Hamilton向量数,则存在XH的一个过平衡点q的2维不变流形,其上充满围绕q的周期轨道,它们的周期随着轨道逼
对于系统(2)的唯一正平衡点q,简单计算即可得到其相应的特征方程为

式(10)中:

由式(5)和式(6)知 P >0,Q >0,Δ =P2-4Q >0.于是可得命题3.
命题3 在式(5)和式(6)成立的条件下,系统(2)在正平衡点q处的特征方程(10)有2对简单共轭纯虚根,分别为:

定理1 在式(5)和式(6)成立的条件下,系统(2)至少存在1个过平衡点q的2维不变子流形Π1,数,则存在另一个过q的2维不变流形Π2,其上充满围绕q的周期解,随着这些周期解收缩到q,其相应
系统(2)除了以上周期解外,还可能存在其他周期解.
容易验证,若系统(2)中的a23=0,但式(5)和式(6)中的其他式子仍满足,则系统变为2个独立的2维LV系统:

此时系统是可积的,并有2个独立的首次积分:

而且在平衡点q处的特征值为2对简单纯虚根:

因此,系统(12)的轨道由2个子系统的轨道(均为周期轨道)组合而成,分布于I1(x)和I2(x)确定的水平集上,这个水平集由轨道的初值确定,拓扑等价于2维环面S1×S1,仅当2个子系统解的周期之比为有理数时,对应的4维系统(12)的解才是周期解,否则为拟周期环面解.
特别地,若(φ1(t,I1),φ2(t,I1))和(φ3(t,I2),φ4(t,I2))分别是 2 个子系统的周期解,则(φ1(t,I1),φ2(t,I1),q3,q4)和(q1,q2,φ1(t,I2),φ2(t,,I2))就是对应 4 维系统(12)的 2 个周期解,而且易证它们都是Hamilton系统(2)在参数a23=0时的椭圆型周期解.根据Hamilton系统的性质,当a23≠0充分小时,Hamilton系统(2)仍然存在2个与它们对应的周期解.
定理2 在式(5)和式(6)成立的条件下,当a23≠0充分小时,系统(2)存在2族分别对应于(φ1(t,,I1),φ2(t,I1),q3,q4)和(q1,q2,φ1(t,I2),φ2(t,,I2))的周期解.
3 不可积性与Hamilton混沌
根据Hamilton系统中的Liouville完全可积性定义[9-10],若4维系统(2)还存在一个独立于Hamilton函数H(x)的首次积分I(x),则它的解均在H(x)和I(x)确定的水平集上,而这个水平集是紧致的(H(x)的水平集拓扑等价于3维球面).故由完全可积性定理知,该水平集拓扑等价于2维不变环面,其上若存在周期解,则必属于定理1中那两族之一.
另一方面,对充分小的a23≠0,系统(2)在式(5)和式(6)成立的条件下至少有3族非退化的周期轨道.因此,可得定理3.
定理3 对充分小的a23≠0,系统(2)在Liouville意义下是不可积的.
下面用Lyapunov指数来数值论证系统(2)是否出现Hamilton混沌.
Lyapunov指数是反映一个动力系统是否存在混沌的主要工具[12].若所考虑的动力系统存在正的Lyapunov指数,则可认为系统是混沌的.
对于系统(2),若取参数a12=a23=a34=1,b1=b3=-1,b2=b4=1,则用数学软件Maple计算该系统的最大Lyapunov指数,结果如图1所示.
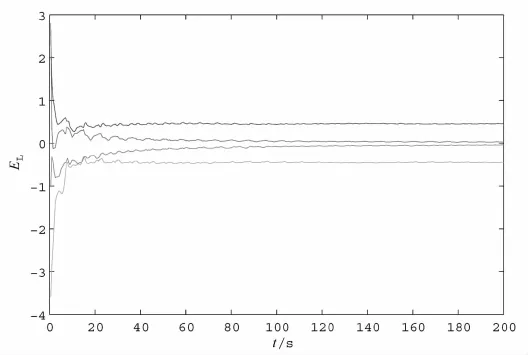
图1 Lyaounov指数
从图1可看到,系统(2)的4个Lyapunov指数中有2个为0,另外2个Lyapunov指数为±0.445.因此,此系统是混沌的.
[1]Hofbauer J,Sigmund K.Evolutionary games and population dynamics[M].Cambridge:Cambridge University Press,1998.
[2]Xia Yonghui.New results on the global asymptotic stability of a Lotka-Volterra system[J].Appl Math Comput,2011,36(1/2):117-128.
[3]Svirezhev Y M.Nonlinearities in mathematical ecology:Phenomena and models:Would we live in Volterra's world?[J].Ecological Modelling,2008,216(2):89-101.
[4]Upadhyay R K.Observability of chaos and cycles in ecological systems:Lessons from predator-prey models[J].International Journal of Bifurcation and Chaos,2009,19(10):3169-3234.
[5]Duarte P,Fernandes R L,Oliva W M.Dynamics of the attractor in the Lotka-Volterra equations[J].Journal of Differential Equations,1998,149(1):143-169.
[6]Zhao Xiaohua,Luo Jigui.Classification and dynamics of stably dissipative Lotka-Volterra systems[J].International Journal of Nonlinear Mechanics,2010,45(6):603-607.
[7]赵晓华,吴红颖.保守型Lotka-Volterra系统的Hamilton结构与周期解[J].浙江师范大学学报:自然科学版,2007,30(3):246-250.
[8]Picard G,Johnstone T W.Instabillity cascades,Lotka-Volterra population equations,and Hamilton chaos[J].Physical Review Letters,1982,48(23):1610-1613.
[9]李继彬,赵晓华,刘正荣.广义哈密尔顿系统理论及其应用[M].2版.北京:科学出版社,2007.
[10]Meyer K R,Hall G R,Offin D.Introduction to Hamiltonian dynamical systems and the N-body problem[M].2nd ed.New York:Springer,2009.
[11]Milnor J.Morse theory[M].New Jersey:Princeton University Press,1969.
[12]Ott E.Chaos in dynamical systems[M].2nd ed.Cambridge:Cambridge University Press,2002.
猜你喜欢
数学物理学报(2022年3期)2022-05-25
数学年刊A辑(中文版)(2019年3期)2019-10-08
中国中医急症(2019年10期)2019-05-21
传媒评论(2018年7期)2018-09-18
汉字汉语研究(2018年1期)2018-05-26
科技风(2018年1期)2018-05-14
传媒评论(2018年11期)2018-02-16
中国工程咨询(2017年10期)2017-01-31
IT时代周刊(2015年7期)2015-11-11
振动工程学报(2015年2期)2015-03-01
