感觉性融像(下)
2011-12-15 15:20齐备
中国眼镜科技杂志 2011年9期
齐备/文
(接上期)
4.8 双眼单视界
4.8.1 Panum空间(Panum’s space)
如前所述,只有双眼单视圆上的物点在双眼视网膜形成像点,才会被双眼融合为完整单一的目标像。位于双眼单视圆近侧或远侧的物点则会导致双眼交叉性复视或双眼同侧性复视。但在实际检测中发现,位于双眼单视圆近侧或远侧的微距物点在双眼视网膜上所分别形成的像点也能被双眼所融像。检测方法是让双眼注视两个相同的重叠目标物,将其中一个目标物沿着一只眼的视线前移到双眼复视极限,为Panum空间的近界,然后采用同样的方法将目标物沿着一只眼的视线后移到双眼复视极限,为Panum空间的远界,Panum空间的近界与远界之间的空间称为Panum空间。
4.8.2 Panum区(Panum’s area)
偏离双眼单视圆的Panum空间内的物点,在双眼视网膜所分别形成像点必然偏离双眼视网膜对应点,故可知偏离双眼视网膜对应点的微距像点也能被双眼所融像。注视物点在一只眼的视网膜形成像点,该像点可与另一眼视网膜某区域中的任意一点融合为完整单一的目标像。这种能与对侧眼像点相融像的视网膜对应区称为Panum区(图11)。Panum区的存在验证了感觉性融像的作用,黄斑中心凹的视觉功能精细,故Panum区仅约为水平5’~10’;黄斑区边缘Panum区约为水平20’,视网膜周边区的视觉粗糙,视网膜Panum区和与之对应的Panum空间相对较大。

图11 双眼单视界
5 双眼立体视(binocular stereopsis)
5.1 定义
双眼视网膜上有一定差异的影像,在融像的过程中产生单一的具有深度层次和立体感的影像,称为双眼立体视觉。目标物的定位有两个指标内容,即方位和远近。双眼平面融合规定了注视眼对于目标物注视方位,立体视觉则规定了目标物与注视眼的距离。
5.2 双眼视差(binocular disparity)
5.2.1 视差的成因
由于双眼水平相距大约60mm,故在双眼注视同一个立体目标时,因集合因素使双眼视线对目标的指向角度有所不同,双眼视网膜对应关系发生一定差异,影像存在一定的差异,称为双眼视差(图12)。

图12 双眼视差
5.2.2 视差与深度觉
视觉中枢可以通过视觉空间对于实际空间的进行“理解”分析,通过感觉性融像对于运动性融像所重合的双眼影像进行“同化”处理,使双眼所看到的互有差异的影像整合为单一的有立体感的影像。发生于双眼水平向的视差称为水平视差,水平视差为双眼视觉的深度信息,视差小到一定程度,便没有深度觉,视差越大深度觉越大,视差大到一定程度则发生双眼复视。双眼在垂直向因无聚散因素的存在,双眼视网膜垂直向对应关系即使发生差异,产生垂直向视差,却对深度觉影响不大。
在同一双眼视野中,不同的视差可以同时引出不同的深度结果。
5.3 立体觉区
5.3.1 绝对立体觉区
为双眼单视圆的远近微距范围为Panum空间,当双眼注视单视圆上的物点A时,另一物点B脱离单视圆,位于Panum空间近界或远界附近,双眼能通过感觉性融像将双眼的B像点同化为单一的影像,并以中心目标A物点为参照,理解B物点的深度,根据异常视网膜对应的像差形式,判断B物点与注视眼的深度距,这一深度距可以被定量分析,故接近于近界和远界的Panum空间又称绝对立体觉区。
5.3.2 相对立体觉区
Panum空间近界近侧为近复像区,Panum空间远界远侧为远复像区,位于Panum空间的近界和远界附近的复像区不发生视干扰,称为相对立体觉区。当双眼注视单视圆上的A物点时,另一物点B无论位于近相对立体觉区或远相对立体觉区,双眼均能通过感觉性融像忽略它的复像性质,并可以中心目标A物点为参照深度,对B物点的深度性质定性(图13)。

图13 双眼立体视觉区
5.4 立体觉的定量
如图14所示,中心目标A物点位于双眼单视圆上,另一B物点若也位于单视圆上,则双眼注视A点时的集合角α和双眼注视B点时的集合角? 为同弧上的圆周角,∠α应该等于∠β,由于没有视差,故立体觉为零。若物点B脱离单视圆,则∠α就不等于∠β,当∠α与∠β的差异大到一定程度,则注视眼就能分辨A、B两目标远近差异,因此可以采用双眼注视两目标物的集合角的弧度差来定量立体觉阈值(深度觉阈值),称为立体视锐。

图14 双眼立体视锐的定量
设:中心目标物点A位于双眼单视圆上,双眼注视A点时的集合角为α,另一物点B脱离单视圆,双眼注视B点时的集合角为β,双眼结点间距为p,B点距双眼的垂直距离为d,A点距双眼的垂直距离为d +△d。
求:双眼注视两目标物的集合角的弧度差Sa。

例2设:p =60mm,d =6000mm,△d =30mm 1弪(弧度单位)=360/2π=57.29578°=206265”求:Sa

正常立体觉锐度≤11”,这就意味着在6m的距离,两个目标远近距离相差达到3cm,正常眼就能分辨出两目标远近差异。
5.5 单眼立体视(monocular stereopsis)
5.5.1 发生机理
已知双眼立体视觉是由双眼视差为基础而产生的,在长期双眼立体视觉的经验重复下,当模拟与诱发双眼立体视觉相近的视差物理空间,或重复诱发双眼立体视觉的参照环境,则在没有双眼融像的情况下,单眼也能实现立体视觉功能,然而单眼立体视觉不及双眼立体视觉稳定可靠,必须依赖特定的诱发暗示(inducing clue)。
5.5.2 诱发暗示
①遮盖与重叠 如图15-a所示,在平面六边形目标中插入手的轮廓,由于有手的遮盖与重叠,使六边形显出远近立体的层次。
②条栅错觉 如图15-b所示,条栅图形A上叠加取向不同的条栅图形B,使A和B显现不同层次。
③物体大小 如图15-c所示,大的目标较近,小的目标较远。
④阴影效果 如图15-d所示,明亮部凸起,阴暗部凹陷。
⑤颜色和清晰度 如图15-e所示,颜色深和清晰度好的目标较近,颜色浅和模糊的目标较远。
⑥集合线和消失点 如图15-f所示,集合线和消失点都具有深度延伸感。
⑦心理性视差 眼位的前后微动,可以获得两次目标距数据,通过心理分析帮助判断目标的远近,例如猫在跃上桌子前,常前后移动头位,判断桌子的高度。
⑧运动视差 目标的远近移动,使注视眼从连续的目标距数据中判断目标的位置,如一只足球在6m以外,单眼不能精确的判断它的目标距,但足球向着注视眼滚来,则较容易判断目标的位置。

图15 诱发单眼立体视觉的暗示条件
6 双眼视的检测
6.1 双眼同时视和平面融像的检测
6.1.1 Worth四点视标检测
①单眼抑制 当双眼注视中心目标物时,双眼单视圆上的所有物点均会通过两个视觉通道分别在双眼视网膜对应点成像,使视觉中枢感受到单一完整的视觉空间。然而若双眼存在压抑性叠加,可出现双眼在单独注视时视通道均呈开放状态,在双眼同时注视时,视觉中枢选择性的忽视其中一个视通道,称为黄斑抑制。此时被测者仍然可以利用另一个视觉通道获得完整的视觉信息,即在双眼同时注视时,视觉较差的眼并未参与视觉活动,而被测者却不能觉察到这一点,也不能通过交替遮盖双眼来主动发现。
②Worth四点视标的检测原理 Worth四点视标下方为圆形白色视标,上方为菱形红色视标,左右为十字形绿色视标(图16)。

图16 Worth四点视标
检测时右眼戴红色滤光透镜,左眼戴绿色滤光透镜,由于光谱拮抗的作用,关闭了右眼绿色光线视通道和左侧红色光线的视通道,发生双眼局部性分视,右眼只能看到下方圆形视标和上方菱形视标,左眼只能看到下方圆形视标和左右十字形视标(图17)。

图17 Worth四点视标双眼局部性分视
在双眼同时注视的情况下,若看不到上方菱形红色视标,只看到左右十字形绿色视标,且下方的圆形视标偏绿,证实右眼视通道关闭,未参与双眼视觉活动,可能为右眼黄斑抑制。若看不到左右十字形绿色视标,只看到上方菱形红色视标,且下方的圆形视标偏红,证实左眼视通道关闭,未参与双眼视觉活动,可能为左眼黄斑抑制(图18)。

图18 Worth四点视标检测双眼同时视

图20 “狮子和笼子”双眼视图片检测

图19 Worth四点视标检测双眼融合异常
在双眼同时注视的情况下,若看到下方的圆形视标呈横置或纵置的椭圆形,分离为两个圆形视标,证实双眼所注视的同一个目标物点在双眼视网膜非对应点成像,且双眼不能通过感觉性融像将二者整合为一个单一完整的像,故发生双眼复视,为双眼平面融像机能障碍的表现(图19)。
综合验光仪能够测试双眼同时视的方法很多,如十字环形视标检测、偏振十字视标检测、十字注视视标检测、垂直对齐视标检测和水平对齐视标检测、偏振平衡视标检测、偏振红绿视标检测和棱镜双眼分视检测等,兹不赘述。
6.1.2 双眼视图片检测
同视机上备有多种同时视检测图片,其原理为采用平面镜反射或三棱镜折射的方法将两种不同的图片投射到双眼视网膜对应区,若在双眼同时注视的状态下,完全看不见其中一张图片为单眼黄斑抑制,其中一张图片上的信息不完整为异常视网膜对应,证实该眼采用非黄斑中心凹注视; 双眼影像不能重迭为双眼平面融像机能障碍。最常用的为“狮子和笼子”图片检测(图20)。
6.2 立体视觉检测
6.2.1 二视标立体视觉检测
①双线视标的检测原理 已知双眼注视同一立体目标时,聚散因素可使双眼视线对目标的注视角度发生差异,从而形成双眼空间影像的视差,而视差导致双眼的视网膜异常对应是深度觉产生的根源。
当双眼注视两根在同一平面中形状相同的平行线状视标时,每一根线状视标都分别在双眼的视网膜对应点成像,双眼将各自视网膜对应点接收到的线状视标像融合,则双眼可看到与注视目标相同的双线视标像(图21-a)。若采用偏振滤镜使右眼只看到双线视标中的一根,左眼只看到双线视标中的另一根,则两根分离的线状视标分别在双眼的非对应点成像,于是模拟了实现双眼深度觉的视差需求。此时已具备了形成深度觉的两个条件,其一是双眼视网膜上的单线视标像在对侧眼视网膜的对应点寻求融合未果,其二是存在于双眼视网膜异常对应点上的单线视标形态相似,则双眼可以利用感觉性融合将双眼的单线视标融合为单一的单线视标。若以原来的双线视标的深度位置为参照平面,该单线视标在双眼视觉空间发生了深度变化,若双眼存在集合性融像倾向,单线视标向前凸起(图21-b),若双眼存在散开性融像倾向,则单线视标向后凹陷(图21-c)。
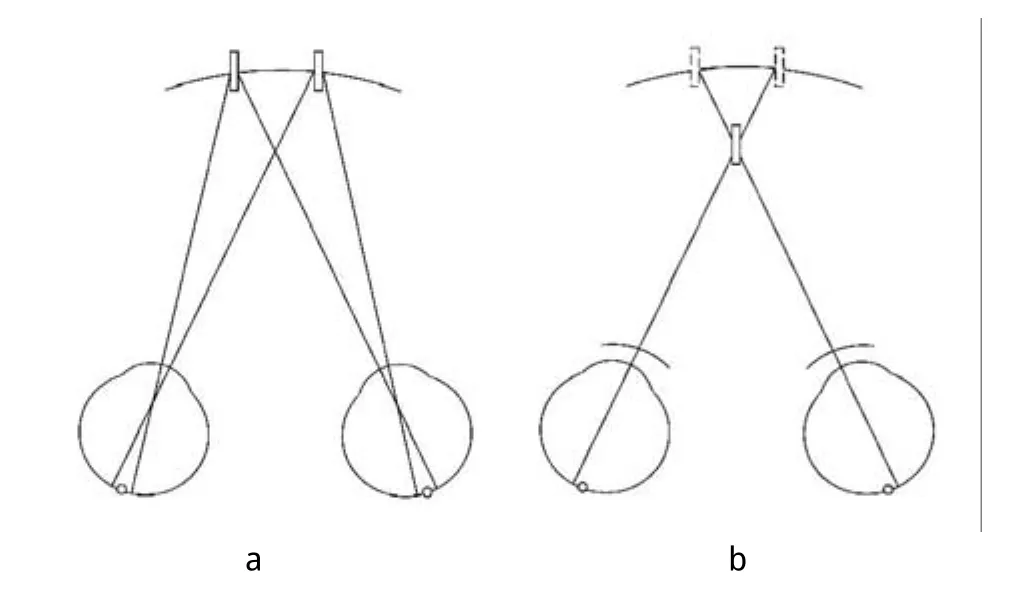

图21 双线视标的检测原理
② 检测方法 上方和下方为纵向等长的双线视标,中央为一圆形点状视标(图22-a)。双眼戴偏振滤镜,右眼只能看到上方右侧单线、下方左侧单线和中央点状视标(图22-b);左眼只能看到上方左侧单线、下方右侧单线和中央点状视标(图22-c)。检测时双眼同时注视中央圆形视标,产生充分融合。双眼所分别见到的分视单线视标像存在着微量视差,上方两单线视标像存在散开视差,有散开性融像倾向,以圆形点状视标为参照平面,上方视标显示为凹陷的单一线条像,深度量值约为2.1’;下方两单线视标存在集合视差,有集合性融像倾向,以圆形点状视标为参照平面,下方视标显示为凸起的单一线条像,深度量值约为1.1’(图22-d)。

图22 二视标立体视觉的检测
③异常结果分析与中央点状参照视标相比,下方的线条融合为单一线状视标像,但不显示凸起,立体视锐>1.1’,上方的线条融合为单一线状视标像,但不显示凹陷,立体视锐>2.1’。若在检测时上方的线条延迟凹陷≥10sec,表现为上方仍为双线视标像,下方显示为凸起的单一线条像,提示双眼不能动员散开性融像,存在隐性内斜视(图23-a);若下方的线条延迟凸起≥10sec,表现为下方仍为双线视标像,上方显示为凹陷的单一线条像,提示双眼不能动员集合性融像,则提示双眼存在隐性外斜视(图23-b)。
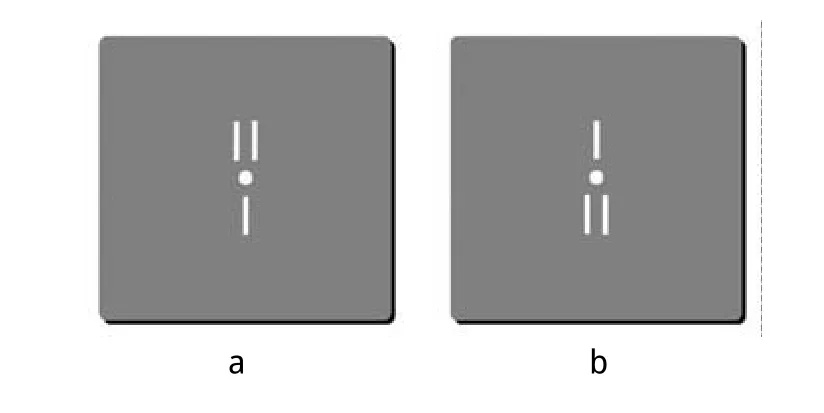
图23 二视标立体视觉检测的异常结果分析
6.2.2 四视标立体视检测
① 检测原理 四视标立体视检测仍然是利用上述双线视标的原理,在双眼偏振分视后,采用多个视标定量模拟集合性视差,从而对能诱发立体视觉的最低双眼视角差进行定量分析,之所以仅定量分析双眼集合性视差,是因为双眼的散开性融像范围远小于集合性融像范围。
② 检测方法 视标构成为上下左右各有两条纵向等长线状视标,每组线条的间距按上、右、下、左依次增大,称为检测组视标。中央为一圆形点状视标,上下左右分别有加号、正方型、三角形和五角星形视标,称为参照组视标(图24-a)。双眼戴偏振滤镜,右眼看到所有检测组视标的左侧线条像和所有参照组视标像(图24-b),左眼看到所有检测组视标的右侧线条像和所有参照组视标像(图24-c)。

图24 四视标立体视觉视标组成
检测时双眼所见到的各组分视视标像均发生集合视差,4组双线视标形成4条凸起的单一线条像,集合视差越大凸起程度越大,凸起程度按上、右、下、左依次增大(图25)。

图25 四视标立体视觉检测所见
③ 异常结果分析与参照组视标相比,若4组双线视标均成4条凸起的单一线条像,立体视锐≤1’;若上方的线条融合为单一线状视标像,但不显示凸起,立体视锐>1’;若上方和右方的线条融合为单一线状视标像,但不显示凸起,立体视锐>2’;若上方、右方和下方的线条融合为单一线状视标像,但不显示凸起,立体视锐>5’;若4组双线视标融合为单一线状视标像,均不显示凸起,立体视锐>10’。
6.2.3 多尔曼(Dolman)深径觉计
综合验光仪定量测定完全正常的立体视觉锐度至少大于1’,而已知立体视觉锐度正常值应≤11”,故对于绝大多数综合验光仪四视标立体视检测正常的测试者,还必须进行更为精细的立体视锐度定量分析。立体视匹配游标测定法是精细立体锐度的定量方法之一,其中以多尔曼(Dolman)深径觉计最为常用。
如图26所示,测试距离为6m,嘱被检者双眼平视直立的固定黑色柱形目标,然后通过定滑轮牵拉移动另一根形状相同的可移动黑色柱形目标,直至被检者认为两黑色柱形目标与注视眼的距离相等为止。

图26 多尔曼(Dolman)深径觉计
分析两黑色柱形目标的前后相差距离,从刻度尺上可以读出长度单位换算为以弧度秒为单位的双眼视差角,即为立体视锐度(表1),人群正常值统计学分析,两黑色柱形目标的前后距离>30mm,即立体视锐度>11”,为立体视觉异常。
6.2.4 Titmus立体觉检查图
利用偏振光原理设计,在自然光或灯光的投照下,起偏图板可以发出两组相互垂直的线偏振光,被测试者戴上偏振滤镜,可实现双眼目标分视,系列分视目标的视差不等,并已量化分级为以弧度秒为单位的双眼视差角,共分为9个级别(图27),在双眼注视图片时,被检眼能分辨出立体视觉的最小级别即为其立体锐。

图27 Titmus立体视觉检查图
(全文完)
猜你喜欢
计算机工程(2022年3期)2022-03-12
小型微型计算机系统(2022年1期)2022-01-21
小哥白尼(趣味科学)(2020年3期)2020-07-27
天津大学学报(自然科学与工程技术版)(2018年6期)2018-05-30
军营文化天地(2018年2期)2018-04-20
小学生时代·大嘴英语(2017年1期)2017-03-20
现代计算机(2016年3期)2016-09-23
中国眼镜科技杂志(2013年5期)2013-09-08
中国眼镜科技杂志(2013年1期)2013-09-08
中国眼镜科技杂志(2012年11期)2012-09-14