多星发射上面级姿态变结构控制方法研究
2011-09-18 02:32:04张凤宁余薛浩王建清
上海航天 2011年2期
张凤宁,余薛浩,王 鹏,王建清
(上海航天控制工程研究所,上海 200233)
0 引言
多星发射上面级多颗卫星并联布置,逐次分离,分离后包含主动段、滑行段、调姿段和分离后效段。上面级存在控制耦合和惯量耦合。传统设计采用比例积分微分(PID)控制律,通过忽略飞行器各通道间耦合,强制解耦成俯仰、偏航和滚动3个通道,分别对各通道进行控制系统设计[1]。该设计方法的优点是简单,缺点是由于上面级的3通道间存在强耦合,通过加入补偿去耦会出现较大的误差,强制解耦后设计的控制器存在理论缺陷[2]。变结构控制方法能自动适应强耦合的对象特性,具对内部和外部不确定性的强鲁棒性,易满足系统的瞬态响应指标,算法简单可靠、设计过程简单,特别适于上面级姿态控制系统此类有强耦合、变系数特点的对象[3]。但不连续的非线性变结构控制律会产生抖振,可采用准滑动模态和趋近律等方法有效减轻变结构抖振。
为此,本文采用变结构方法对多星发射上面姿态控制进行了研究。
1 数学模型
上面级主动段刚体姿态动力学简化模型可表示为
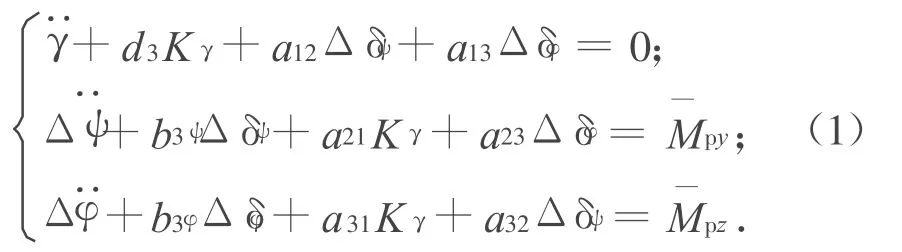
式中:φ,ψ,γ分别为俯仰角、偏航角和滚动角;Δδφ,Δδψ分别为俯仰和偏航等效摆角;Kγ为开关工作状态,取-1,0,1时分别表示姿控喷管负开、关闭和正开;d3,b3ψ,b3φ分别为主动段滚动、偏航和俯仰控制力矩系数;aij为主动段运动方程耦合系数;分别为主发动机结构偏差干扰力矩系数;Δψ,Δφ分别为ψ,φ的偏差。此处:i=1,2,3;j=1,2,3。俯仰和偏航通道的执行结构为摇摆发动机,模型可表示为

式中:ξ,ωn分别为发动机模型的阻尼和频率;s为拉氏算子;X(s)为伺服机构。摇摆发动机存在常值偏差0.2°,发动机摆动角速度≤20(°)/s。
滚动通道的执行机构为姿控喷管,纯延迟为0.02 s,最短间隔时间30 ms。
2 控制耦合分析
由上面级主动段刚体姿态动力学简化模型可知:各通道控制力矩存在控制耦合。各通道的耦合度可用kφ/γ=a13/d3,kγ/φ=a31/b3φ绝对值的大小表示。分析实际参数可知,俯仰、滚转通道间的耦合为3个通道间控制耦合中的最强者。取点火时刻为参考时刻,所得耦合度见表1。
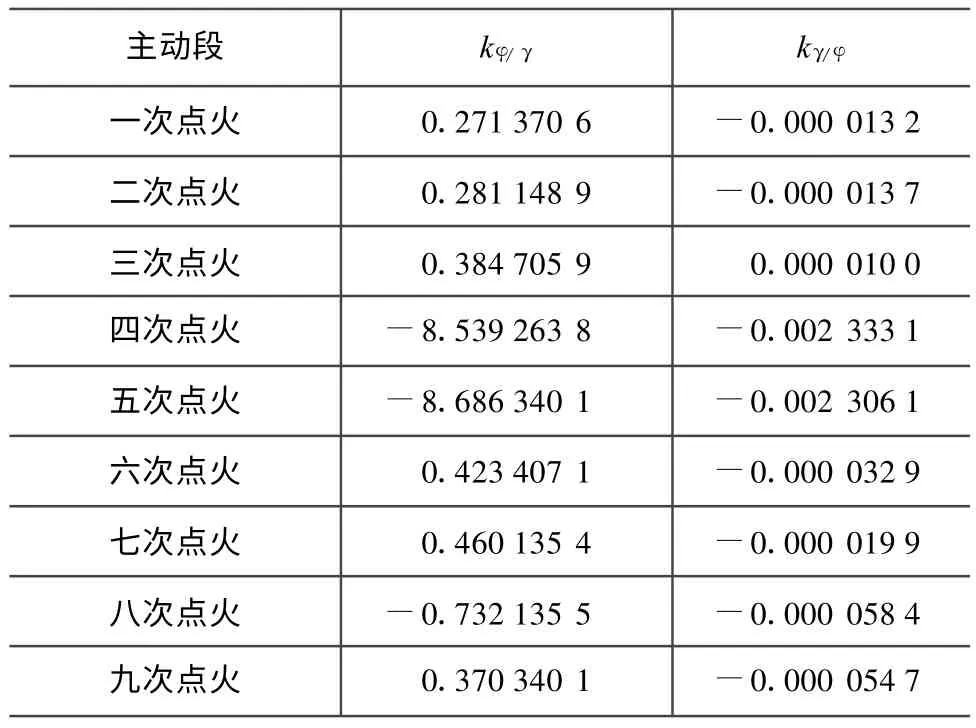
表1 主动段控制耦合分析Tab.1 Activephase control coupling analysis
由表1可知:第五次点火时刻控制耦合影响最大,故针对主动段第五段设计变结构姿态控制律。
3 变结构姿态控制律设计
3.1 控制系统方案
变结构姿态控制系统采用捷联惯组+计算机+滚动姿控喷管+俯仰/偏航摇摆发动机方案,系统如图1所示。
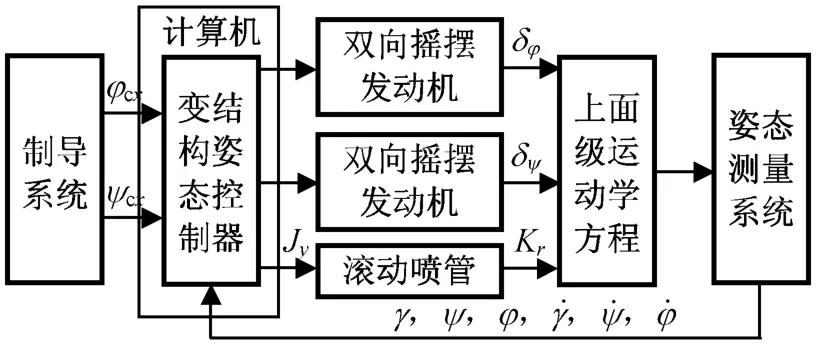
图1 变结构姿态控制系统原理Fig.1 Variable structure attitude control system block diagram
3.2 控制律
对上面级主动段刚体姿态动力学简化模型式(1),取状态变量

取控制量

整理后得上面级主动段刚体姿态动力学简化方程的状态空间模型为
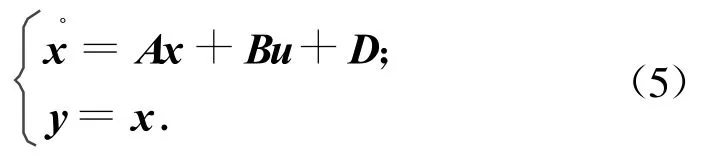
式中:
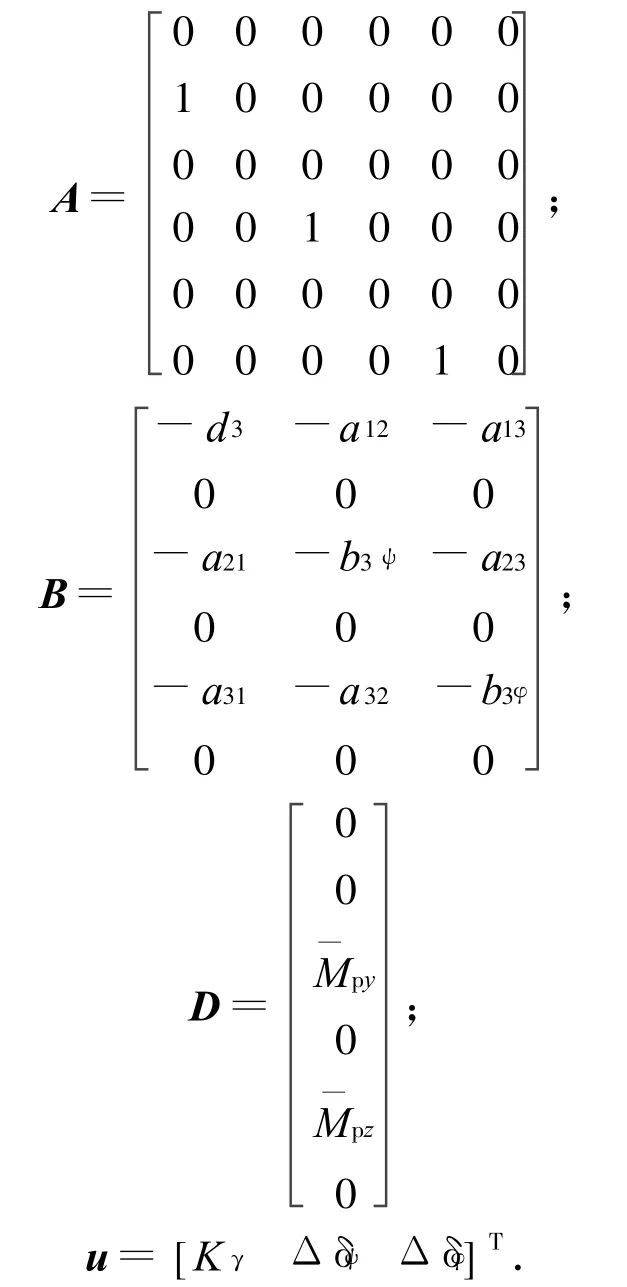
根据姿态控制的要求和变结构控制规律设计要求,取系统的参考输出信号为
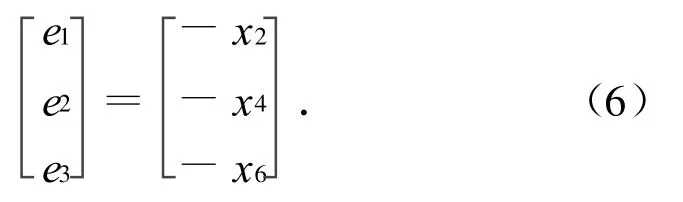
为实现输出跟踪,取切换函数为
式中:c1,c2,c3为大于零的实数。
为削弱抖振,保证在有限时间内到达设计的滑动模态,选指数趋近律
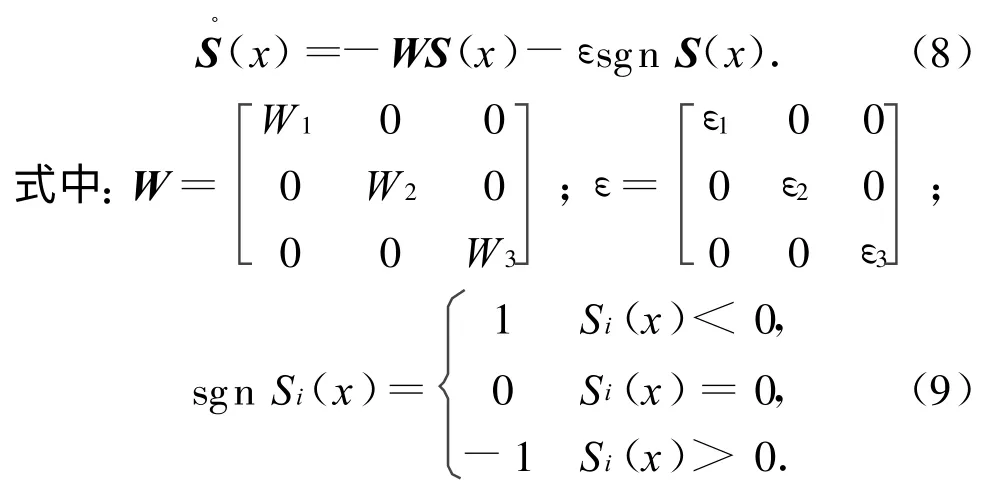
此处:W1,W2,W3,ε1,ε2,ε3为正实数[4]。因,由式(7)、(8)可得

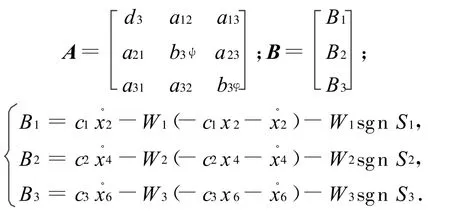
由式(10)可解得控制量

式中:
至此,设计的姿态控制规律既保证系统状态在有限的时间内到达滑动模态,又满足上面级姿态控制系统的设计要求。
4 仿真
4.1 仿真环境与条件
在Matlab软件中仿真。取控制周期40 ms,变步长仿真,仿真时间64.5 s。上面级姿态控制的初始参数见表2。在参数额定和参数有摄动两种条件下进行仿真。参数摄动为d3,b3ψ偏差-15%,,a13,a31偏差+15%。
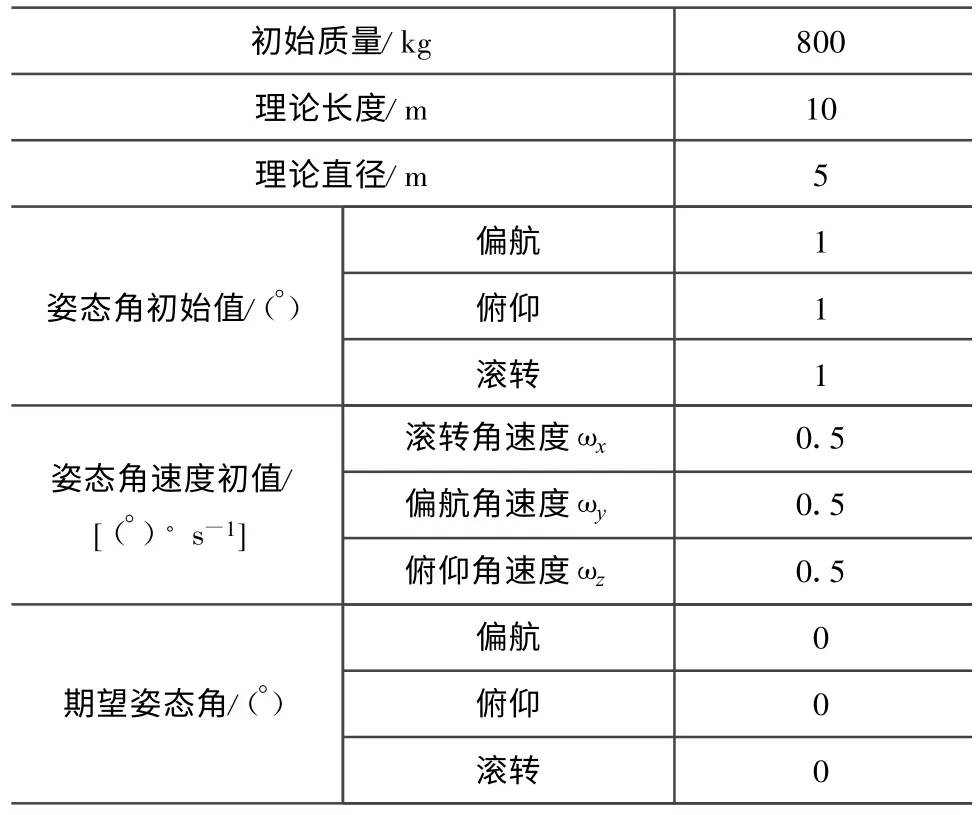
表2 初始参数Tab.2 Initial parameter
4.2 仿真结果
额定状态的仿真结果如图2~7所示。参数摄动状态的仿真结果如图8~13所示。两种状态的通道数据和喷管工作参数分别见表3、4。
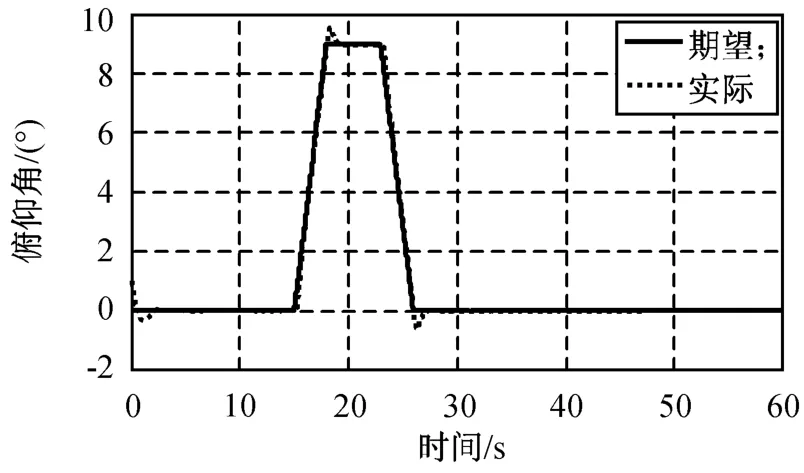
图2 俯仰角跟踪结果Fig.2 Pitch angle tracking result
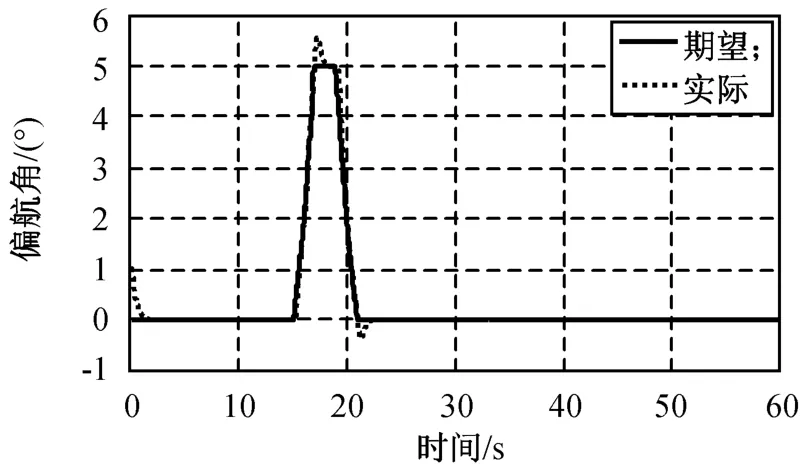
图3 偏航角跟踪结果Fig.3 Yaw angletracking result
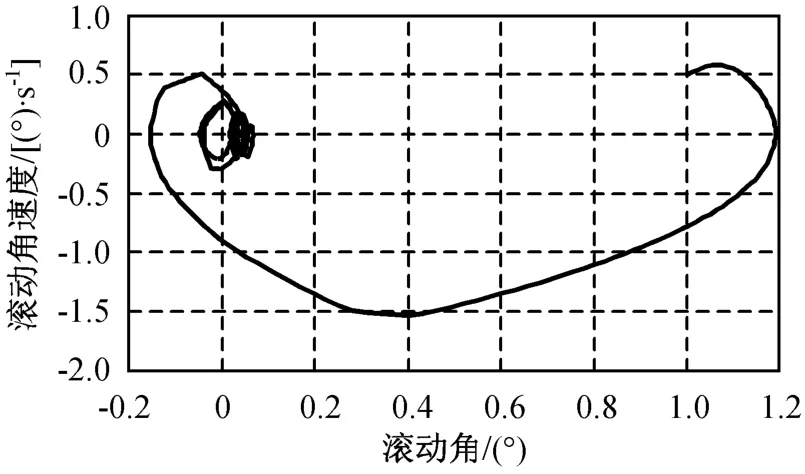
图4 滚动通道相轨迹Fig.4 Roll channel phase trajectory
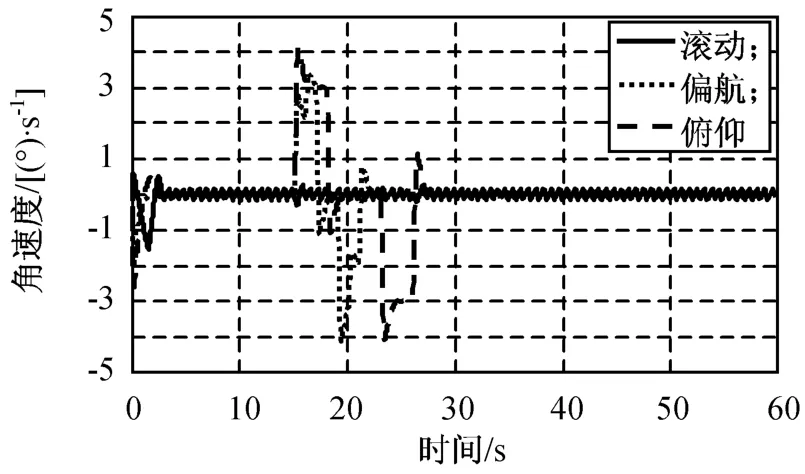
图5 三通道角速度Fig.5 Three-channel angular velocity
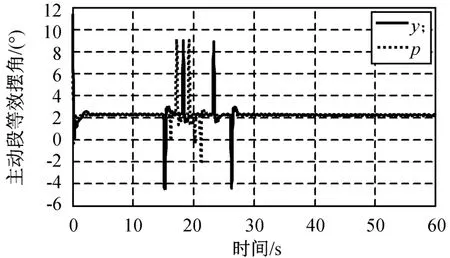
图6 俯仰和偏航通道等效摆角y,pFig.6 Pitch and yaw channel equivalent rudder angle
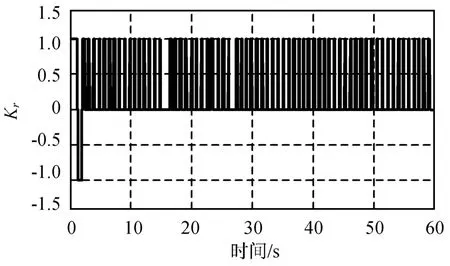
图7 滚动姿控开关Fig.7 Roll attitude control switch
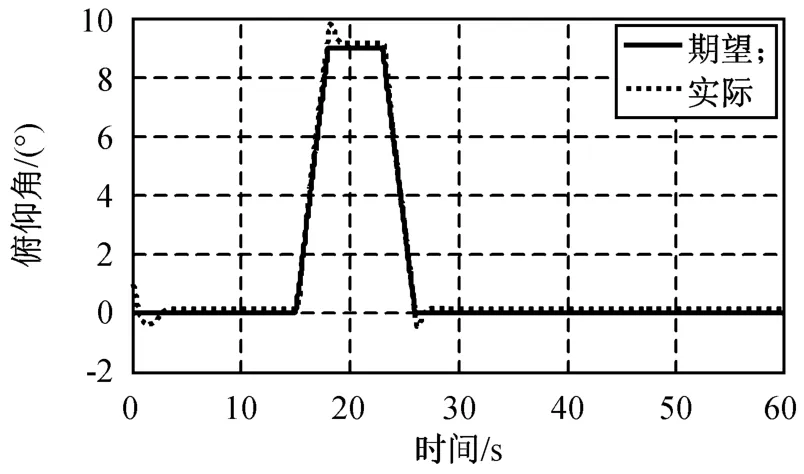
图8 俯仰角跟踪结果Fig.8 Pitch angle tracking result
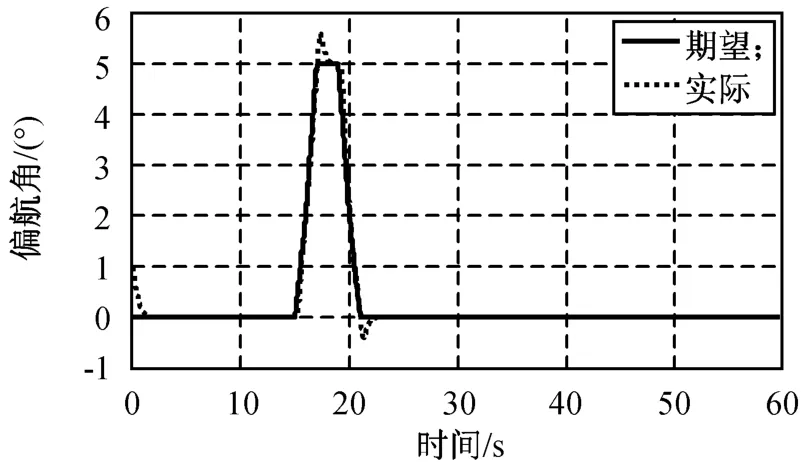
图9 偏航角跟踪结果Fig.9 Yaw angletracking result
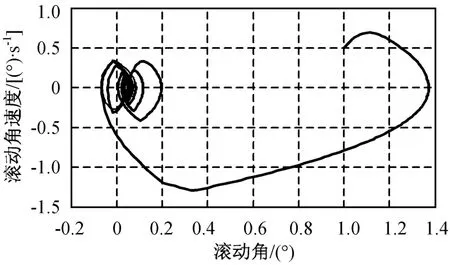
图10 滚动通道相轨迹Fig.10 Roll channel phasetrajectory
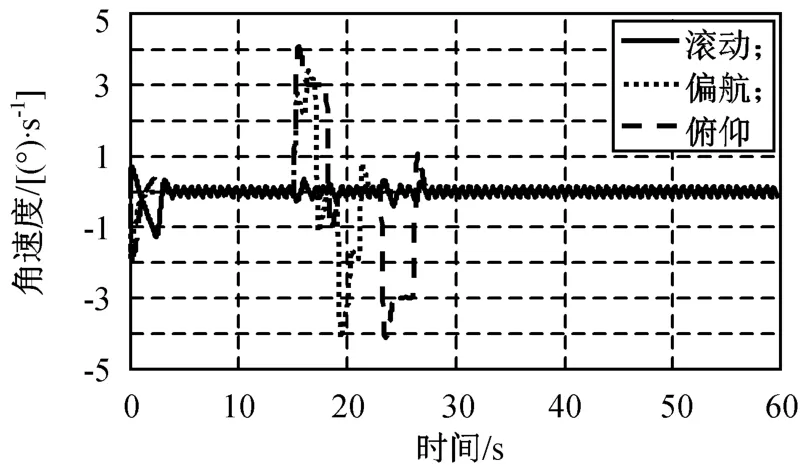
图11 三通道角速度Fig.11 Three-channel angular velocity
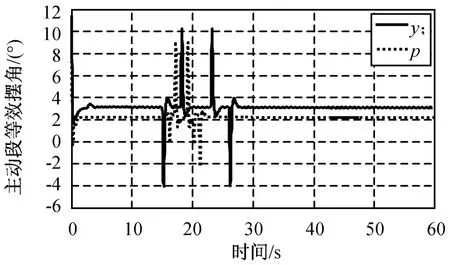
图12 俯仰和偏航通道等效摆角Fig.12 Pitch and yaw channel equivalent rudder angle
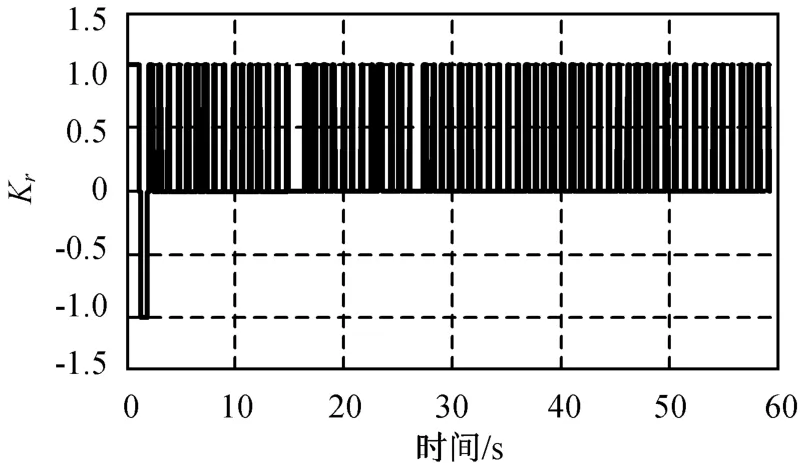
图13 滚动姿控开关Fig.13 Roll attitude control switch
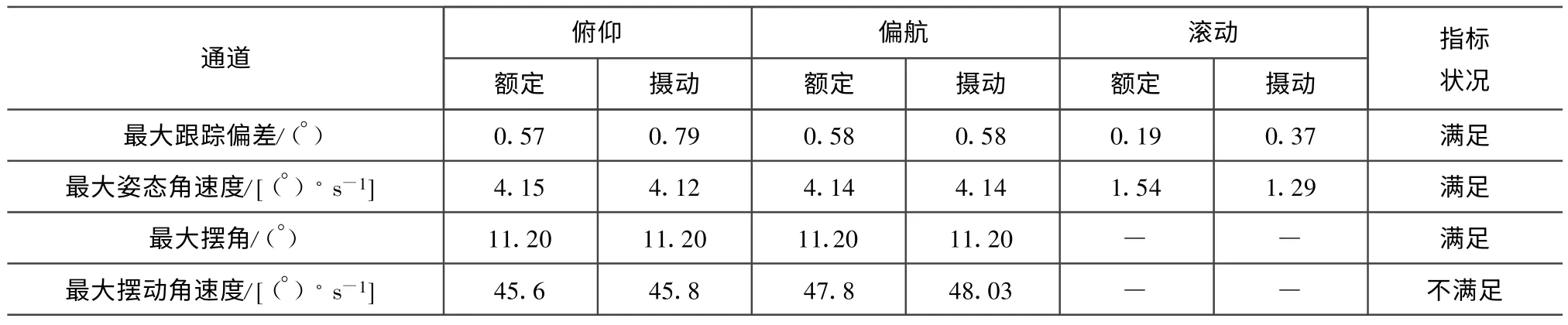
表3 三通道数据Tab.3 Three-channel data

表4 主动段滚动姿控喷管工作参数Tab.4 Activephaseroll nozzle operating parameters tables
由仿真结果可知:在额定状态和参数摄动条件下,俯仰角和偏航角均能满足跟踪精度要求,跟踪过程平稳迅速,滚动通道迅速进入极限环,同时由姿态角跟踪结果可知抖振被较好地减轻,控制效果较理想;参数摄动状态下,因常值干扰变大,稳态跟踪效果稍差(0.15°),且滚动开关工作时间变长;两种状态的起控时刻伺服机构摆动角速度均较大,可达48(°)/s;导引过程中,起导及止导时刻摆动角速度亦较大,达到25(°)/s。
5 结束语
本文对多星发射上面级姿态变结构控制方法进行了研究。结果表明:当存在耦合恶劣和参数摄动时,变结构姿态控制律能实现姿态快速稳定,跟踪过程动态性能好,抖振较小,变结构控制律合理,具鲁棒性,但还存在起控、起止导时段等效摆动角速度较大、常值干扰引起稳态偏差等不足,需对控制律设计作进一步优化,以满足工程应用要求。
[1]徐延万.控制系统(上)[M].北京:宇航出版社,1991.
[2]贺有智,张晓宇.模糊变结构在三滑块移动质心再入弹头系统上的应用[J].系统工程与电子技术,2005,27(2):292-334.
[3]陈宏钧,王卓军.飞行器变结构姿态控制的研究[J].哈尔滨工业大学学报,1997,29(6):11-13.
[4]高为炳.变结构控制理论[M].北京:国防出版社,1990.
猜你喜欢
装备制造技术(2021年1期)2021-05-21 07:54:44
学生天地(2020年3期)2020-08-25 09:04:16
汽车观察(2018年9期)2018-10-23 05:46:40
中国自行车(2018年8期)2018-09-26 06:53:44
自动化学报(2018年2期)2018-04-12 05:46:05
中学生数理化·高一版(2017年3期)2017-07-08 11:55:27
通信电源技术(2016年4期)2016-04-04 02:57:36
火控雷达技术(2016年1期)2016-02-06 02:18:01
中国铁道科学(2015年4期)2015-06-21 06:46:06
空间控制技术与应用(2009年2期)2009-12-20 08:30:17