
基于微处理器的精密长程连续检测仪的研制
2011-09-03 10:50:12罗向东徐晓秋赵孝文
黑龙江科学 2011年3期
罗向东,徐晓秋,赵孝文
(1黑龙江省科学院科技孵化中心,黑龙江哈尔滨150090;2黑龙江省科学院技术物理研究所,黑龙江哈尔滨150086)
随着科技的不断发展,自动化水平的不断提高,工业过程控制中对物位监测及自动控制的要求越来越高,国内物位控制仪表研究人员对可实现闭环控制的连续物位控制仪表进行了大量的研究。目前国内应用的连续物位监测仪表主要有射线式,电容式,雷达式,超声波等几类,因其使用功能、环境、应用领域的不同存在各式各样的局限性。射频导纳物位仪表是从电容式物位测量技术发展起来的,该类仪表具有防挂料、可靠性高、测量准确、应用广泛等特点。
1 测量原理
检测仪的测量结构如图1所示。物位的确定是由探头和步进电机两部分综合决定的。长短双射频导纳传感器探头根据逻辑关系确认物位的界面;步进电机通过变速器、线轮带动探头运动,步进电机与线轮的转数比是一个常数,线轮的周长也是一个常数,故而探头移动的距离(也就是物位)只与步进电机运动的步数相对应。因此确定了按表1的数字逻辑关系控制探头运动,并计算步进电机运动的步距数,即可达到随动测量物位的目的。
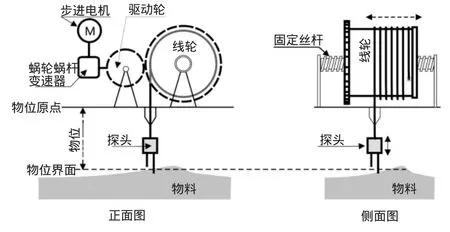
图1 测量原理示意图Fig.1 Schematic diagram of measurement
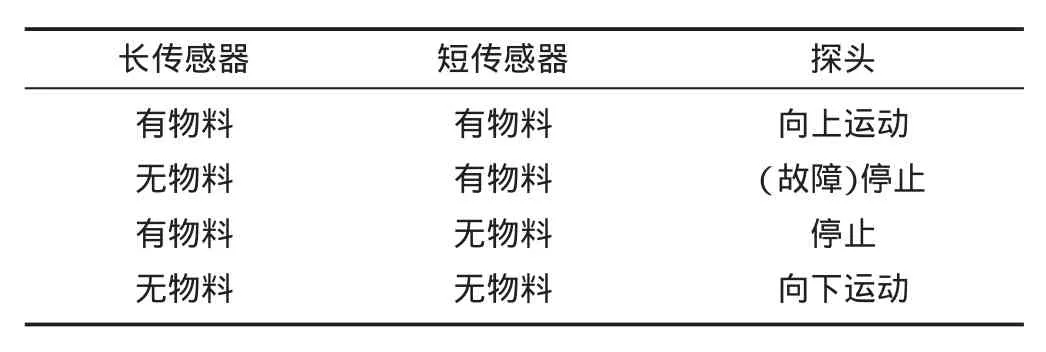
表1 传感器状态与探头运行的关系表Table 1 Therelationshipbetweensensorstatusandtheproberunlist
2 仪表设计
检测仪按结构可分为双极射频传感器探头和主机两部分。主机和探头之间通过1条4芯的电缆连接。当系统工作后,探头内的微处理器分别将两个传感器接收到的工作频率信号直接采集后,通过485接口输出到总线上,传感器接收到的信号经定时采样后,送主控板进行数据处理,处理的结果经逻辑判断控制步进电机的转动状态,根据步进电机转动的角度计算传感器位移的距离,LED显示计算结果和4~20mA输出。
2.1 探头设计
探头内部主要由两个射频传感器、微处理器和接口芯片组成。
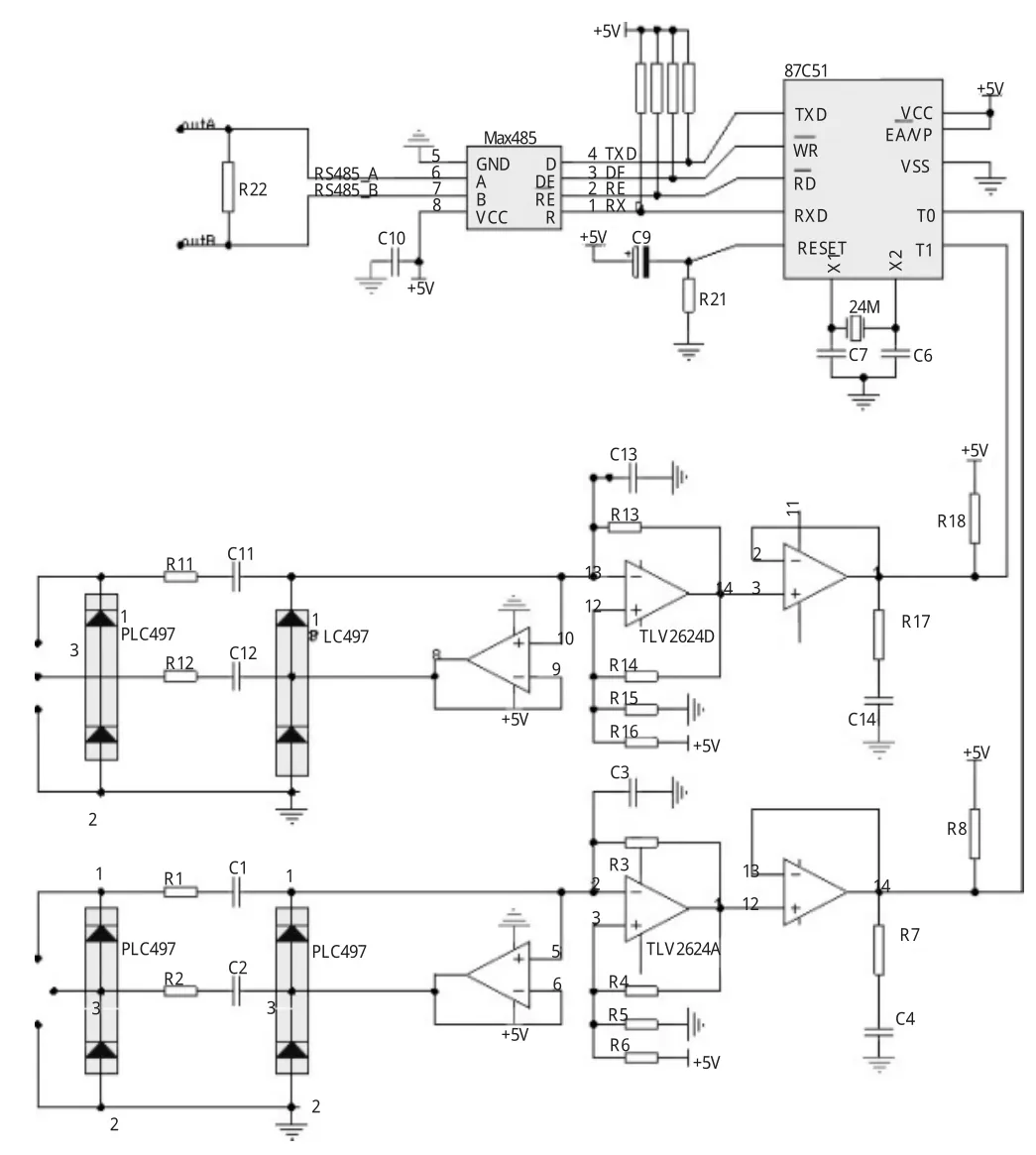
图2 传感极电路原理图Fig.2 Sensing pole circuit diagram
图2所示为传感极电路原理图,PLC497、R1、R2、R11、R12、C1、C2、、C11、C12是考虑电磁兼容而设计的,因传感器有时会在带有强静电场所应用,抑制消除这种干扰是很必要的;运算放大器TLV2624、R3、R4、R5、R6、R13、R14、R15、R16、C3、C13组成两个桥式振荡器,正反馈支路的电阻R阻值相同,负反馈支路是RC网络,当震荡器稳定工作后,产生波形的占空比为1∶1;4个射极跟随器分别将信号相互隔离;芯片89C51通过编程将两路频率信号分别定时采集处理后发送出去;C6、C7、24M组成时钟电路;C9、R21是通电复位;芯片MAX485、R22是总线收发器,通过它将CPU送来的信息发送到485总线上。
2.2 主机设计
主机由主控器、步进电机和电机驱动器、减速器和机械传动系统等组成。如图3,后面分别介绍。
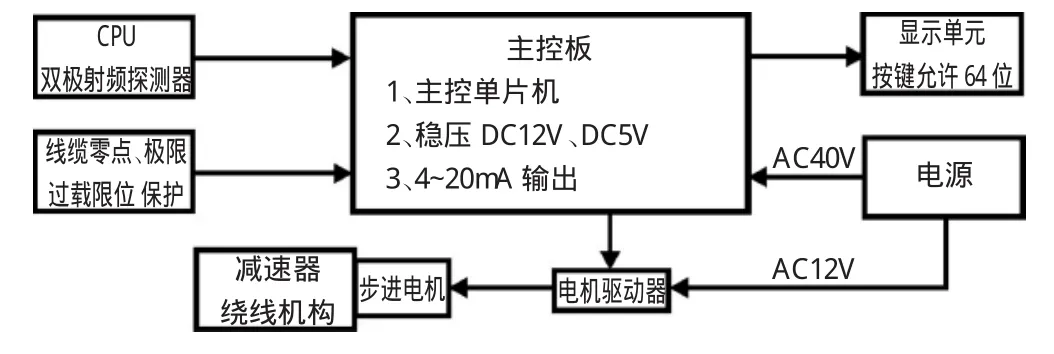
图3 主机结构示意图Fig.3 Schematic diagram of the host
2.2.1 主控板
主控板是整个仪表的核心,由微处理器、RS485接口芯片、数据掉电保存芯片、电机数字逻辑控制电路、输入和输出光电隔离、4~20mA输出、电源转换等功能模块组成[1]。
其中微处理器完成电机控制、探头信号的输入和计算、物位结果的显示和输出、参数的输入等功能。微处理器采用ATMEL的89C55单片机芯片[2]。
电机数字逻辑控制电路具有根据上下限位行程开关的状态,从硬件上保证步进电机的驱动信号正确的输出。如:当探头向上运动时,如果触发上限位保护的行程开关,则步进电机向上的脉冲信号无法发出,不过电机向下运动的脉冲信号依然可以发出。电机数字逻辑控制电路由3片数字逻辑门电路74LS04、74LS32、74LS08组成。
光电隔离模块是提供将主控板与各外部功率元件连接起来,并有效隔离干扰的必备部分。
电源转换提供给系统DC5V和DC12V的电源。
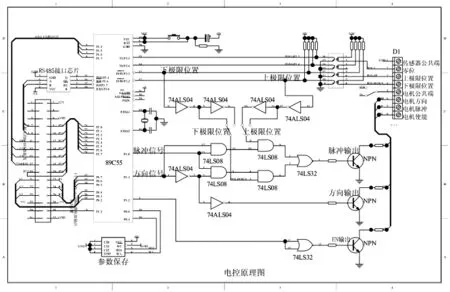
图4 主控板电路原理图Fig.4 C ontrol board circuit diagram
2.2.2 步进电机及相关设备
步进电机选用了34HS300CZ二相混合式步进电机,最大静转矩4.0N·m,最大空载起动转速252r/min;驱动器选择MS-2H090M二相电机驱动器,细分数分为16档,最小步距角0.009°,最大步距角0.9°,电机工作时步距角为0.09°。减速器为10∶1的蜗轮蜗杆铝合金减速器。单片机的工作频率为24M。
本课题中,步进电机、减速器、驱动器和单片机的工作频率的选取是极为关键的。这几个设备相互关联,直接影响到仪表的测量精度、跟踪速度、负载能力、工艺体积、产品成本等关键的性能。下面就这几个关键设备的选取进行说明。
第一.步进电机的负载能力(即所需要的扭矩)。为简化计算,以探头和轮盘的惯性重量合计估算为10kg(以拉力秤在轮盘上快速拉动测出);线轮的圆周为1m,则力臂长度为0.16m。
扭矩=拉力×力臂=1.6N·m
第二.步进电机的最高运行转速。以在3min之内运动15m测量距离计算,1r为1m,
转速=15/3=5r/min
为了选取合适的电机(电机越大,价格越贵),还要考虑加配减速装置,表2为加配减速器后对电机性能的要求:
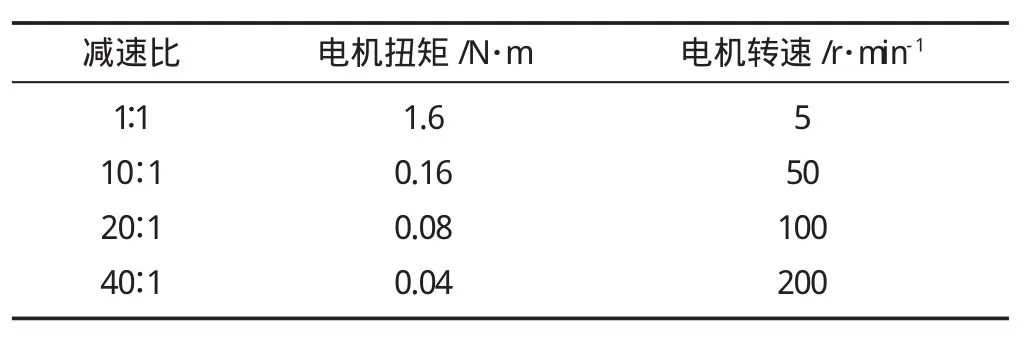
表2 电机性能表Table 2 Motor performance table
第三.测量精度的保证。步进电机是一种作为控制用的特种电机,它的旋转是以固定的角度(称为“步距角”)一步一步运行的,其特点是没有积累误差,所以广泛应用于各种闭环控制。本项目采用步进电机目的也在于在一个长距离的测量范围内保持测量精度。粗步概算一下,如果步进电机的步距角0.09°,减速比合计为20∶1,绕线轮直径为1m,则有探头每运动1m,步进
电机行走数为 360°/0.09°×20/1=80000。
传动误差可忽略,误差为1000/80000=12.5nm,可以看出检测仪的测量精度是相当高的。
第四.跟踪速度。仪表除了要满足测量精度外,跟踪物位的速度也很关键。由于控制电机的转速是由单片机完成,除此之外单片机还要完成其他控制功能,故而电机程序的系统占用率不宜太高,相应的步进电机步距角就不能太小。表3为单片机控制MS-2h090驱动器在不同的细分条件下所能达到的步进电机的极限频率。
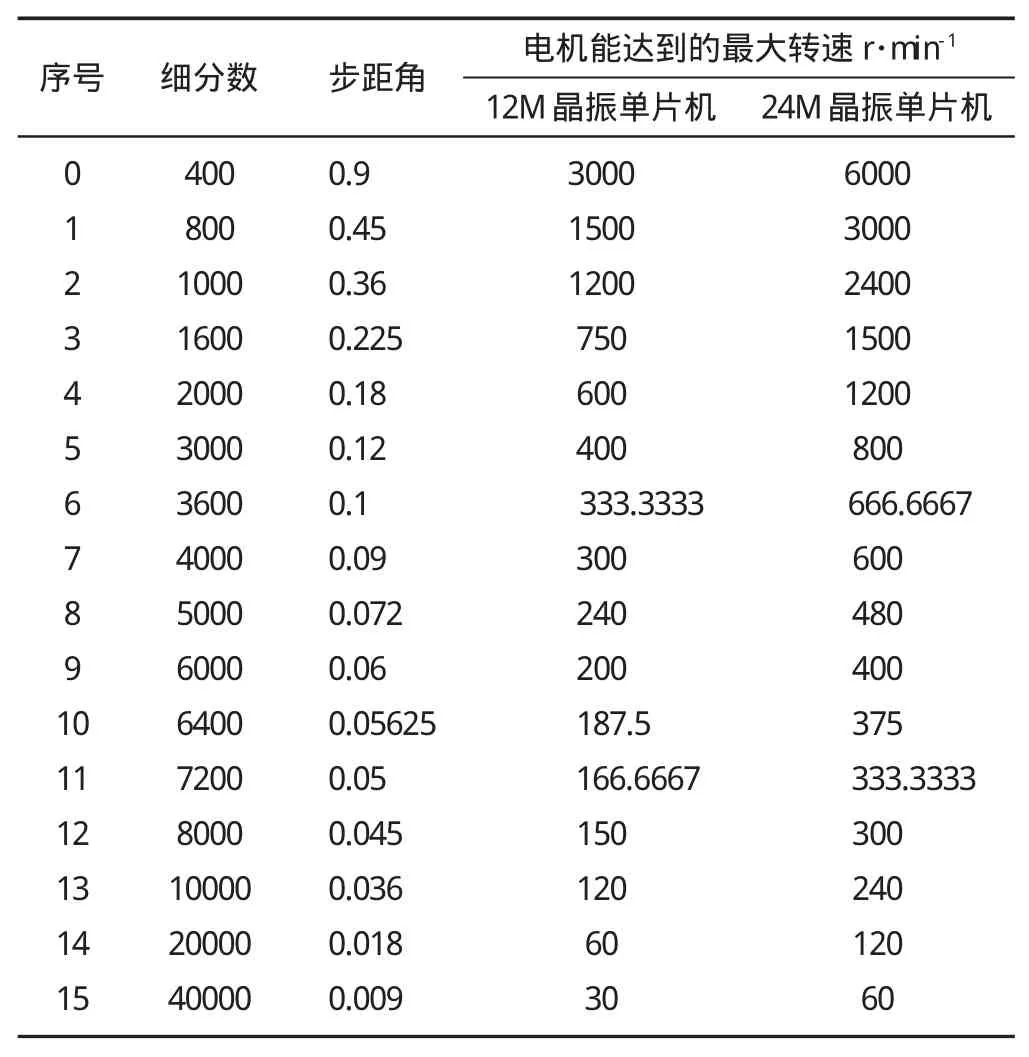
表3 电机最大转速与单片机晶振频率的关系Table 3 The relationship between the microcontroller crystal frequency and the maximum motor speed
综合考虑各个因素,并通过试验,工作时步进电机运行速度最高300r/min、步距角0.09°、扭矩0.16N·m,单片极工作频率24M。从现场使用情况看,仪表的各项性能都达到了设计目的。
2.2.3 机械结构和原点行程开关
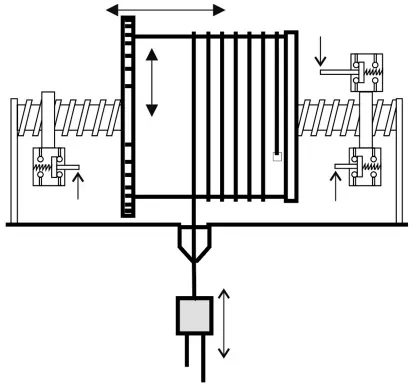
图5 行程开关位置示意图Fig.5 Schematic position limit switch
检测仪的机械结构如图5所示。线轮的左侧为齿轮,受步进电机的传动齿轮驱动。线轮中间套扣,与中间的固定丝杠咬合在一起。按图5示位置,线轮转动时,除了带动探头上下运动外,还沿着固定丝杠水平方向移动。
此种机械结构设计有三个好处:
①保证了线轮到出线口的连线始终与固定丝杠相垂直,从而使得探头的连线均匀的绕排在线轮上;
②由于出线口位置固定,仪器的防尘很容易设计,有效解决了防尘的工艺问题;
③线轮的水平方向移动使得各个行程开关的安装相当的容易,如图所示,无需在仪表外部添加任何设计即可安装好行程开关。
3 软件设计和人机操控界面
软件以C语言作为编程语言,采用模块化程序设计。主要是完成电机升降控制、数据的采集、分析、运算。对仪表中各个器件的初始化、数据显示、按键的处理、以及数据存储等等[3]。
具体见程序流程图:
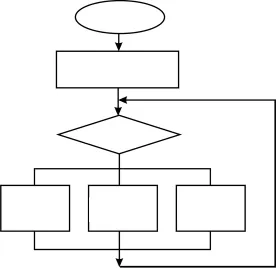
图6 主程序流程图Fig.6 The main program flow chart
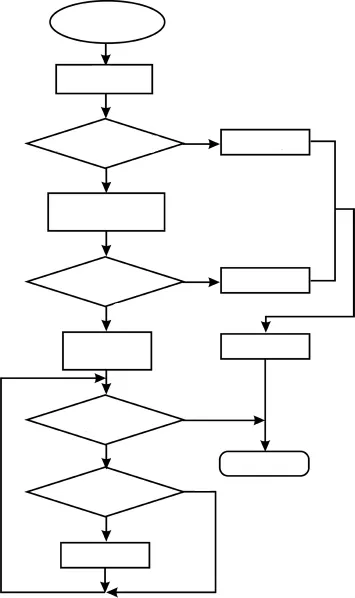
图7 运行测量流程图Fig.7 The operation flow measurement
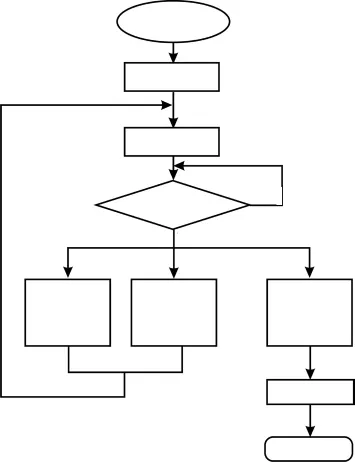
图8 修改参数流程图Fig.8 Modification parameters flow
4 结束语
精密长程连续检测仪采用双射频导纳传感器、光电信号传输、微处理器、电机跟踪传动、软件编程等各种技术相结合,实时跟踪被检测物位。双极探测和步进电机随动跟踪技术的有机结合及机电一体化的应用。使该仪表具有很高的灵敏度,测量范围长、抗干扰性强。仪表已于发电厂的灰库进行了实际应用,取得了很好的应用效果。
[1]马忠梅,籍顺心,张凯,等.单片机的c语言应用程序设计[M].北京:航空航天大学出版社,1999.
[2]ATMEL 89C52用户手册[Z].Atmel Corporation,2010.
[3]姜志海,赵艳雷.单片机的c语言设计程序设计与应用[M].北京:电子工业出版社,2008.
猜你喜欢
计测技术(2021年2期)2021-07-22 09:17:24
铁道建筑技术(2021年4期)2021-07-21 05:33:28
西安电子科技大学学报(2021年2期)2021-04-30 02:16:24
环球市场(2021年11期)2021-01-15 23:24:45
化工自动化及仪表(2021年3期)2021-01-05 21:44:35
新商务周刊(2019年24期)2019-12-22 05:47:21
商品与质量(2019年7期)2019-07-24 09:19:20
数码世界(2018年6期)2018-07-12 01:08:04
精密制造与自动化(2015年1期)2015-12-06 02:47:32
自动化博览(2014年7期)2014-02-28 22:32:25
