
水下设备与水下机器人的研究与应用
2011-09-03 10:50:18刘志忠
黑龙江科学 2011年3期
刘志忠
(黑龙江省科学院高技术研究院,黑龙江哈尔滨150090)
2007年8月,俄罗斯在北冰洋4300多米的海底插上了一面钛合金国旗的消息引起了世界各国广泛关注。俄罗斯科学院远东分院的科学家新研制的无人水下自动设备“古钢琴-1”也参与了此次北冰洋插旗活动,据俄专家称,这是世界上最好的可在寒冷条件下工作的水下设备。水下研究与机器人技术是俄罗斯远东地区优势科研领域之一,特别是俄罗斯科学院远东分院在该领域的科研工作形成了完整系统,具有明显特色。
1 海洋技术问题研究所[1]
该所位于海参崴,成立于1988年,现有161名工作人员。其中,科研人员39名,通讯院士1名,博士7名,副博士10名。
1.1 主要研究领域
无人水下机器人及其系统;
海洋环境结构研究,采用声学及其它方法对研究海洋的技术设备进行开发;
生态与监测;
研究海洋能源及其它可再生能源并研制其利用技术。
该所在无人水下自动设备研制领域处于世界领先地位,不仅从事水下机器人的理论研究,还进行无人水下设备的试验工作。无人水下自动设备已有10多个型号,可进行海底研究、地形拍照、寻找和探测沉没目标、测量环境参数,下潜深度达水下6000米。无人水下自动设备在完成科研和搜索工作、地质勘探及海洋监测方面具有很高效率。与美国、法国、中国和韩国都曾有合作项目。
在水文物理方面,该所主要是通过声学方法对大范围非均质性(水质分界线前部区域、气象旋流和水流)和小范围非均质性(浮游物、小气泡聚集)进行研究。非均质性的非固定性和非线性诊断原理研究,可以获得其在空间和时间上的变化数据。
为了预报海洋水产养殖的生态系统的动态,研究产量指标,控制经营过程,研制了海洋种群、鱼类、动物和软体动物群落的数学模型,开展建立生态研究自动化系统和水环境监测的工作。
该所还研究获得可再生能源的方法和技术设备,包括太阳辐射能、风能、海波能等。
1.2 组织结构
该所下设4个部,2个独立实验室以及相应辅助部门。
水下机器人部(控制系统实验室,执行设备和遥控系统实验室,传感器信息处理导航系统实验室);
实验设计和试验工作部 (水下技术设备的系统和装置实验室,测试和试验研究实验室);
应用水声部(水声导航系统实验室,声呐系统实验室,声学天线实验室);
生态系统监测部(生态系统实验室,生物技术系统实验室);
非传统能源独立实验室;
系统保障与计算技术独立实验室。
1.3 无人水下机器人的各种型号

表1 该所研制的各种型号无人水下自动设备的技术指标Table 1 The technological index of unmanned underwater auto-equipments manufactured by this institute
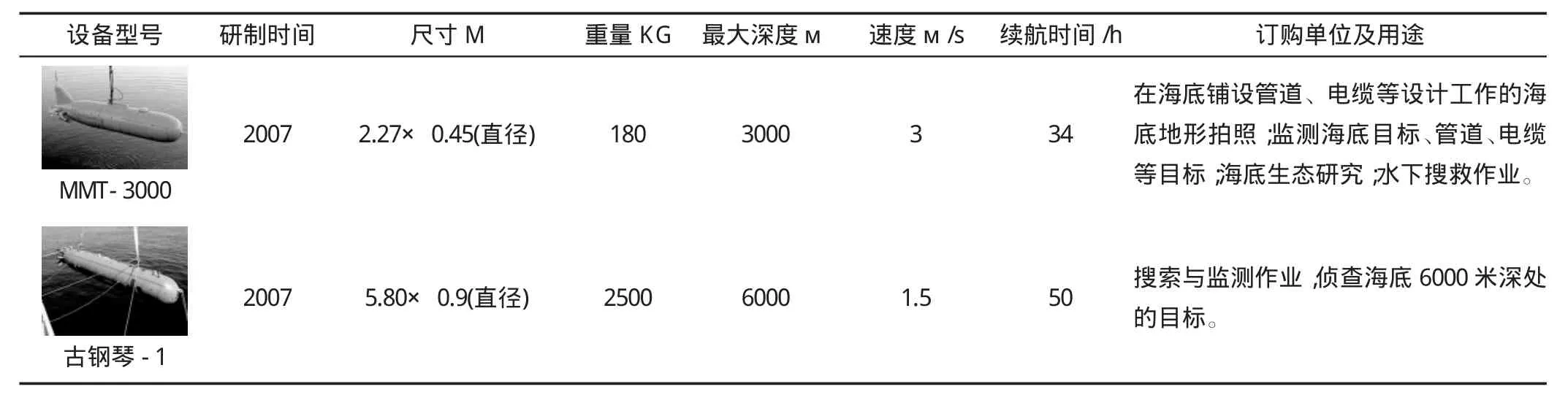
设备型号 研制时间 尺寸M 重量KG 最大深度м 速度м/s 续航时间/h 订购单位及用途2007 2.27× 0.45(直径)180 3000 3 34 MMT-3000在海底铺设管道、电缆等设计工作的海底地形拍照;监测海底目标、管道、电缆等目标;海底生态研究;水下搜救作业。古钢琴-1 2007 5.80× 0.9(直径)2500 6000 1.5 50搜索与监测作业,侦查海底6000米深处的目标。
无人水下自动设备是自行走研究仪器的载体,能够下潜到指定海洋区域,深度达到6000米,根据程序轨道运动,完成所需要的工作,程序结束后可以返回到供给船上或岸边基地。该装置在水下自动工作,无需连接电缆。指令的传送和信息提取是通过水声通讯系统完成的。水声导航系统与船载集成导航系统一起来联系确定装置的位置,而船上的操作人员随时跟踪其运动轨道。该装置的水下连续工作时间取决于设计要求和能源的形式,可达几十个小时。作为研究仪器,在该装置上安装了环境参数测量仪器、照相摄相仪器、扫描声呐、地球物理仪器(地磁仪,轮廓仪,重力仪)。该装置的结构采用了模块技术,可以很容易根据合同的要求来改进该装置。
该装置比船具有很大的机动性,运动参数稳定的高精确度(包括在复杂海底地貌条件下),操作简单,效率高,与深度无关。这些试验样机完成了多次实际工作任务,结果表明,在探测海底矿床、监测环境污染、寻找和侦察核潜艇都有很大的优势。
该装置的主要应用领域包括:海洋研究和水环境监测;海洋地质勘探;水下工程设施和管道检查;环境保护和水产养殖等。
2 太平洋海洋学研究所[2]
该所位于海参崴,成立于1973年,现有646人。其中,科研人员291人,包括院士1人,通讯院士1人,博士30人,副博士123人。
2.1 主要研究领域
对海洋水体及其物理场(声场、光场、电磁场、温度场),某些特点(海波、洋流、涡流、内浪、冰盖),质能交换,海洋、大气和海洋生态系统状况相互影响等进行流体物理学、水化学和水生物学的综合研究;
太平洋及其矿产资源的地质、地球物理、地质化学的研究;
研制新方法并建立研究海洋和大气的技术设备,开发和应用遥控方法,建立海洋学数据库并进行分析。
2.2 组织结构及研究方向
该所有9个部,2个海上实验站。
普通海洋学部(物理海洋学实验室,水文过程与气候实验室,古海洋学实验室,核海洋学实验室,信息学和海洋监测实验室,冰间研究实验室,水文测量组);
海洋声学部(陆圈物理学实验室,统计水文声学实验室,声海洋学实验室,海洋声学探测实验室);
海洋和大气物理学部(非线性动态体系实验室,水文物理实验室,地质物理流体动力实验室);
生物化学技术部(生物物理实验室,生物化学实验室);
地质化学和海洋生态学部(海洋生态毒理学实验室,北极研究实验室,污染研究与生态实验室,水文化学实验室,物理化学分析实验室);
海洋研究技术设备部(海洋技术实验室,声学层析摄影实验室,声学噪音实验室,试验系统研制组,试验系统设计组);
地质和地球物理部(地质物理场实验室,地震研究实验室,区域地质学和构造物理学实验室,地质形态实验室,气体地质化学实验室,海洋矿石构成实验室);
信息技术部(海洋信息综合分析实验室,科技信息实验室,电子通讯组);
卫星海洋学部(卫星海洋学实验室,海洋大气相互作用研究实验室,激光光学和光谱学实验室)。
该所的海洋声学部、海洋研究技术设备部,与水下技术设备研制密切相关,水下声呐系统是这两个部门的强项。如“远距离作用范围水下机器人的导航与遥控水声系统”(图1),可以实现对500公里以外活动范围的水下机器人发送遥控信号。

图1 Fig.1
3 自动化及控制过程研究所[3]
该所位于海参崴,成立于1971年,现有306名工作人员。其中,科研人员124名,院士1名,通讯院士3名,博士22名,副博士64名。
3.1 主要研究领域
连续介质力学的数学问题及控制过程;
信息技术软件的理论和应用问题,包括多处理器计算系统的并行计算;
基于硅的亚单层微结构物理学。基于超高真空技术的新型半导体仪器及材料的研制。
3.2 组织结构及研究成果
该所有5个部,7个独立实验室。其中,机器人技术系统独立实验室是该所专门从事水下技术设备的部门,有7名工作人员,包括,博士3人,副博士3人。
机器人技术系统独立实验室的主要研究方向有两个,即,控制未知和(或)变化参数的非线性复杂多回路动态目标系统,研究其适应性和自调节的合成新方法;多环节机械手和自动水下设备控制系统的研究,以便在未知及变化的环境中和在各种不同程度运动之间相互作用的条件下,快速准确地沿着复杂的空间轨道进行移动。
例如,2006年,该独立实验室研制了控制自动水下机器人主发动机方向的设备和系统(图2),具有噪音小、运动能量消耗小和移动速度快等特点。

图2 Fig 2
4 海洋研究自动化设备专业设计局[4]
该局位于南萨哈林斯克,成立于1978年,现有56名工作人员。其中,科研人员20名,博士2名,副博士4名。
4.1 主要研究领域
海洋学领域的基础和应用研究;水声学、水文物理学、流体力学过程的研究;大气、海洋、海上危险现象以及航行安全等相互关系的研究;
海洋科学仪器制造,以完成海上特别危险现象的研究任务和解决国民经济和国防问题。
4.2 组织结构及研究方向
该局设有计算流体力学和海洋学实验室,流体物理学实验室,太平洋研究技术设备研制部,试验生产基地,莫斯科代表处(深水结构的自动化设计组、通讯系统组、水声测量系统实验室),圣彼得堡代表处(水声监测理论和应用问题实验室)等。
该局可从事综合性探索研究和试验设计工作,包括制造和试验专业海洋设备新型样机,海洋大气状况遥测信息搜集自动化系统的样机等,包括:
建立海洋信息计算系统,解决海洋区域监测和监控任务;
危险海上现象的自动化观测系统;
流体力学的三维张量计算试验数学;
在俄罗斯远东海域的风暴航海性能的研究;
海洋科学仪器制造领域的试验设计工作;
在固定的海上试验场上对水文物理和水文声学场进行研究。
4.3 主要研究成果
2006年,该所主要完成了以下研究试验工作并准备实际应用。
自动水声站。首次建立了装有多部件数字水声天线的自动水声站。该天线由240个接收部件组成,每个部件都进行由声信号向数字电信号的转换。利用可保证初始信号最小失真的网络技术进行数字信息的传递和存储。
深水自动海底地震站。研制了5台深水缆索地震站,采用波折射方法研究海底。数字记录仪可将信息记录在存储SD图上。地震站放置深度3千米,结构小、耗能少、可靠性高,现代化微型处理器。地震站所采用的器件不贵,这就可在海底地震研究方面得到广泛应用,进行批量生产。
小型自动流体物理船(图3)。建立了遥控自动流体物理船的试验样机,排水量20公斤,可以携带记录航行能力、摆动量、海深和海面水温的测量仪器,保证连续传送遥测数据到岸上或船上的无线电通讯数字通道控制站。
通过上面的介绍可以看出,俄罗斯科学院远东分院在水下研究和机器人技术领域拥有相当的实力,一大批专家在这里从事基础研究和应用研究并取得了许多科研成果。据悉,该分院在海洋领域的科研工作量占其总科研工作量的9%,仅次与生物领域和地质领域,居第三位,可见其重要性。

图3 Fig.3
海洋资源是具有战略意义的新兴开发领域,而水下机器设备作为海洋资源勘探开发的重要手段越来越引起世界各国的重视。2002年,俄罗斯总统普京在访问海参崴时参观了俄罗斯科学院远东分院海洋技术问题研究所的无人水下自动设备。2003年,俄罗斯政府海洋委员会通过了关于在海参崴建立“水下机器人设计、制造和认证中心”的决定,项目投资7.5亿卢布(当时相当3000万美元),均从国家预算拨款。经过设计和论证,该项目已经开工建设,预计2011年投入使用。据俄罗斯科学院远东分院的资料显示,该中心实际上是“联邦水下机器人技术中心”。而联邦级的技术中心设在远东地区是不多见的,这再次证明了俄罗斯科学院远东分院在整个俄罗斯水下机器人技术领域拥有国家级的实力和水平。
[1]INSTITUTE OF MARINE TECHNOLOGY PROBLEMS.Underwater Robotics[C].Report on the scientific and organizational activities of the Far Eastern Branch of Russian Academy of Sciencesin 2006,2007:24~30.
[2]PACIFIC OCEANOLOGICAL INSTITUTE.Sonar Navigation System and Remote Control for Underwater Robots Long-Range[C].Report on thescientific and organizational activities of the Far Eastern Branch of Russian Academy of Sciencesin 2006,2007:122~135.
[3]INSTITUTE OF AUTOMATION AND CONTROL PROCESSES.Control Mechanism of Spatial Orientation of High-Speed Propulsion and Highly Maneuverable Autonomous Underwater Robo[C]t.Report on thescientific and organizational activitiesof the Far Eastern Branch of Russian Academy of Sciencesin 2006,2007,8~16.
[4]SPECIAL DESIGN BUREAU FOR AUTOMATION OF MARINE RESEARCH.Small Self-Contained Module Hydrophysica[C]l.Report on thescientific and organizational activities of the Far Eastern Branch of Russian Academy of Sciencesin 2006,2007,136~139.
猜你喜欢
海洋学研究(2023年2期)2023-07-27 13:44:32
清华大学学报(哲学社会科学版)(2022年2期)2022-03-26 09:25:34
海洋通报(2020年5期)2021-01-14 09:26:58
电子竞技(2019年22期)2019-03-07 05:17:26
电子竞技(2019年21期)2019-02-24 06:55:52
电子竞技(2019年20期)2019-02-24 06:55:35
电子竞技(2019年19期)2019-01-16 05:36:09
当代音乐(2018年4期)2018-05-14 06:47:13
时代英语·高二(2017年4期)2017-08-11 18:04:36
琴童(2017年7期)2017-07-31 18:33:48
