飞航导弹协同作战信息化体系构建及分布式仿真
2011-08-22 08:26万建平
教练机 2011年4期
万建平
(海装驻武汉地区军代局,湖北武汉430011)
飞航导弹协同作战信息化体系构建及分布式仿真
万建平
(海装驻武汉地区军代局,湖北武汉430011)
分析了空/天平台与多导弹协同的作战信息化体系,提出了全体系下信息化协同作战典型作战使用流程,且利用HLA-RTI建立了信息化体系四导弹协同作战的仿真系统,并进行了信息化体系的多导弹协同作战侦察、指挥与控制功能演示。为多导弹协同作战信息化体系建设提供参考。
信息化体系;多导弹协同作战;HLA-RTI仿真
0 引言
未来的战争是系统与系统、体系与体系之间的对抗,信息战和电子战将贯穿战争的始终。精确制导武器在现代战争中扮演着重要的角色,在这种情况下,单个武器已经不能充分发挥其应有的作用,多武器协同作战将变得越来越重要。在信息化武器协同应用上,俄罗斯л-700“花岗岩”超声速反舰导弹[1],可将陆、海、空基传感器,卫星获得的信息融合,实现目标信息共享。国内学者[2]提出导弹在信息化体系下的时间协同、空间协同、功能协同和平台协同方案。多弹齐射战术攻击航母战斗群,领弹攻击、“静默”攻击是典型策略,多导弹协同作战是今后战争的重要发展趋势[3]。采用HLA的技术进行大规模的多对多/部队对部队、战略原则研究和演练仿真,可提供多武器系统的体系攻防对抗和武器性能评估仿真[4]。
本文通过国外武器协同作战能力分析,总结了信息化体系下多导弹协同对抗大型舰艇编队的信息化协同作战流程,通过高层体系结构HLA进行了多导弹协同仿真。有效的验证了多导弹协同算法,摸索了信息化数据传输量与多导弹协同的关系,将对信息化体系建设的需求方向提供有益参考。
1 多导弹协同对海作战信息化体系构建
1.1 协同作战信息化需求分析
未来海战中,单艘水面舰艇很少独自进行作战,而是多艘舰艇组成一定规模的编队 (如驱护舰艇编队、航母编队等)进行作战。如:日本海上自卫队“八·八”舰队和编入“宙斯盾”防空导弹驱逐舰后提出了“九·十”舰队[5];印度“维拉特”号[6]能与“戈尔什尼科夫”号组成航母编队,实施编队作战。
大型舰艇编队具备1 000 km以上的防空探测能力,飞航导弹武器系统须具备目标指示满足其长时间机动的位置变化;具备多信息融合的多导弹协同攻击能力,满足舰载突防。因此,信息化协同远程精确打击是飞航导弹对海攻击的必然趋势。信息化体系构建主要研究适合多导弹协同作战样式下的目标侦查、目标指示以及在线任务更改等指挥控制一体的信息传递体系,实现未来空/天平台与多导弹的战术协同。
1.2 空/天平台与多导弹协同的信息化体系(图1)

图1 多导弹协同信息化体系
多导弹协同作战主要有卫星、临近空间飞行器、长航时无人机/高空预警机等空/天平台[3]。信息化体系信息流程传递如下:
1)处理侦查信息,空/天平台所获得的海上目标图像回传到地面情报信息处理中心进行处理;
2)信息上传下达,指挥控制中心主要指阵前指挥所,接收上级指挥所下达的指示和战场态势信息,并定期向上级汇报作战进程,负责向编队内各个指挥所下达作战指挥信息、目标指示信息,并监控各艘舰艇导弹发射情况。
3)各发射平台接收到指挥控制中心下达的作战任务后,进行导弹发射准备,向导弹装订发射参数等工作,必要时可以进行监控导弹的飞行状况等信息。
4)飞行的导弹可以向通信中继平台回传飞行状况和目标图像信息等。
1.3 信息化体系下的协同作战流程(图2)
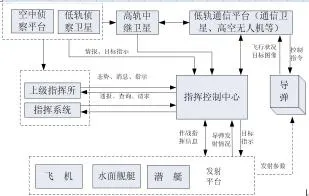
图2 信息化体系作战信息流程示意
信息化体系下协同可以利用空/天平台进行多导弹协同作战,其可能的作战使用流程如下:
1)协同作战规划,通过空/天侦察平台获取目标舰艇编队信息;指挥当局规划作战地点、时间以及导弹协同作战部队;指挥者协调战斗区域和时间,分发目标舰艇编队到达区域、多导弹中心规划航迹和编队形式。
2)导弹协同发射,导弹根据协同规划确定自身平台发射导弹时间和网络编号,完成发射该导弹。
3)协同飞行,导弹惯性/卫星组合导航飞行,指挥控制中心与导弹互通,确立导弹角色,并施行高低飞行策略,导弹任务策略;在卫星不可靠情况下,进行弹间通信、弹间测距、测角,完成编队组织,编队纵向、横向距离调节。
4)协同目标搜索,多导弹到达末制导雷达开机时刻,搜索导弹进行协同搜索,共享目标信息,目标信息融合,目标列表在弹间信息共享。
5)协同目标分配,领弹进行目标分配,向网络内成员下发目标分配信息。网络内成员从弹接收目标分配信息动态规划末制导航路,进行策略目标攻击。
6)毁伤评估,导弹命中目标的最后几幅图像回传指挥控制中心,用于目标毁伤评估。
2 基于HLA-RTI分布式仿真设计
2.1 HLA-RTI仿真构架及仿真开发形式
仿真平台采用分布式构架,由RTI服务器、仿真控制平台、指挥控制模拟平台、导弹模拟平台、显示与评估平台组成。仿真系统中采用有线及无线两种网络,如图3所示,无线网络描述多导弹组网信息传递、指挥控制模拟;有线网络实时下传导弹仿真数据、模拟导弹发射任务规划、仿真时间同步以及仿真任务控制。利用D-Link DWA-130 802.11n无线网卡将指挥控制模拟平台、目标模拟平台以及导弹模拟平台组成无线网络,用于模拟数据的传输。仿真系统软件开发环境采用Windows server 7,开发环境Visual stdio 2008,使用语言C++,图形引擎DerictX9.0运行支撑环境BH RTI2.4。
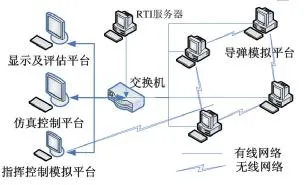
图3 仿真方案网络拓扑结构
2.2 HLA-RTI仿真库算法
2.2.1 RTI服务器
在基于HLA的分布式虚拟环境中,使用RTIRTI交互协议进行通信。RTI服务器负责管理其它各平台上运行的RTI节点,负责分布式环境中全局数据的处理,是各个RTI节点的协调中心。
2.2.2 仿真控制平台
负责管理整个仿真系统的运行/停止、暂停/恢复等,同时协调其它所有平台之间的同步运行以及控制仿真时间的推进。仿真控制平台除完成以上功能之外,同时负责配置和装载各平台的初始化参数,是仿真系统的控制中心。主要交互数据:
1)导弹状态,数目、编号、经度纬度高度、发射时间、发射平台性质;
2)导弹队形,导弹角色、战术队形、调整时间、编队区域;
3)目标及威胁,威胁中心、威胁半径、威胁特性、目标特性;
4)弹目关系。
主要算法:
1)协同任务规划,采用“中心航迹”思想,以导弹编队为单位,规划一条航迹,使导弹编队中处于中心位置的导弹沿此航迹飞行,其他导弹根据相对于中心位置导弹的位置自动生成航迹点;
2)多平台协同发射,考虑各战斗平台的到达预定发射区域的时间窗口T、位置区域窗口(λ,L)约束、导弹在平台的发射任务准备时间和发射扇面约束。同时,载机、水面艇和潜艇均为运动平台,可以在一定范围内进行发射位置区域窗口与时间窗口转换,表达各运动平台的协同发射窗口的转换。
2.2.3 指挥控制模拟平台(图4)
指挥控制模拟平台负责实时显示导弹、目标的运行信息以及战场态势,并向导弹模拟平台下达作战任务以及任务调整,它是对战场环境中指挥控制中心的模拟。主要交互数据:
1)飞行控制,指挥台多导弹任务更改数据;
2)任务控制,多导弹协同飞行任务调整;
3)空/天平台模拟,数据传递信息量、信息速率;
4)弹间数据管理,传递导弹实时数据。
主要算法:
1)在线任务更改;
2)巡逻待机任务。结合运动目标速度和初始目标位置,判断是否为目标更改;结合更改后目标位置和剩余航程估计能否进行目标更改;接收到目标更改位置和更改切入点,进行直线航路规划或盘旋待机。
2.2.4 导弹模拟平台
导弹模拟平台的主要功能是综合虚拟周边环境及导弹初始化参数,对作战任务进行弹道解算,并接收任务调整指示,与其它导弹模拟平台交互,组成作战编队,共同完成作战任务。主要交互数据:
1)弹道初始化;
2)弹道解算,导弹飞行六自由度飞行;
3)任务数据监听;
4)战场态势融合。
主要算法:
1)自主编队飞行,依据网内导弹的通信范围和信道质量优势进行网络网管优选;弹群队形调整通过导弹位置、速度共享,计算自身位置与领弹水平投影纵向距离,对比战斗队形,再计算出弹群速度调节周期和调节速度。速度调节采用某型航空涡扇发动机模型,调速以9.5 s为周期,6.5 s为调速模值,发动机点火达到正常工作转速时间为47.5 s,调速选择范围为正常转速的10%,相互调节时间19 s。
2)目标协同搜索算法,对大型舰艇编队目标采用主动+被动雷达形式协同搜索[7],在区域协同下,在被动导引头视场内多个目标,对导引头阈值加权组合形成的协同被动信号。
3)目标分配算法,构造与军舰防空、攻击导弹飞行高度、攻击弹弹目距离、目标群组合方位相关的,多导弹对舰艇编队的突防广义末制导距离,进行整数分配。
2.2.5 目标模拟平台
目标模拟平台集成在仿真控制平台中,通过初始化参数模拟目标的运动,并实时发布目标运动信息。舰艇编队初始位置、速度以及航向进行运动仿真,仿真中可以加入舰队巡逻、停止等防御与攻击状态。
2.2.6 显示评估平台
显示评估平台通过3D场景及特定对象的三维模型构造虚拟战场,实时、直观地显示战场态势、弹间协作以及对作战效果进行评估。
3 仿真演示
系统仿真条件为:4枚导弹,2个目标,导弹射程2 000 km,飞行速度0.75 Ma;导弹六自由度飞行计算,10 ms计算周期。导弹典型作战过程为:弹群进行任务规划→编队区→编队飞行→巡航飞行→被动导引→目标区域→目标搜索→目标分配→协同攻击,如4所示。同时目标进行40 kn机动,编队飞行后多导弹通过卫星进行任务回传,同时高空无人机、卫星进行目标侦查 (仿真数据双向传输),侦查信息/导弹群信息回传指挥控制模拟平台。指挥控制模拟平台发出多导弹组网信息、目标更改信息,周期5 min。仿真计算数据格式按16字节双精度,相同数据传输3遍。
图5表明,在空/天平台完备情况下,四导弹协同时指挥控制模拟平台传输数据流量。在导弹仿真飞行时,导弹数据流量约500 kbps,满足仿真显示需求;在10 min中流量增大且持续时间为6 s,此时导弹组网成功,并回告指挥控制中心组网后各导弹状态;在50 min处,导弹处于战术队形调整中,仿真数据流量持续在500 kbps,并且战术队形调整到位后,每隔5 min进行导弹状态回传和目标指示,此时仿真网络的数据量将增大至620 kbps左右;在105 min点数据流量在700 kbps,此时弹目距离约150 km,被动导引头开机并协同搜索目标,导弹与通信卫星以及指挥控制模拟平台通信;约130.5 min,导弹协同目标分配后,进行最后2幅图像回传,图像为200 k图片,数据流量达到1 300 kbps。因此,多导弹协同需要信息化提供相应数据流量的支持。

图4 指挥控制模拟平台

图5 指挥控制模拟平台数据流量
4 结语
从多导弹协同对抗大型舰艇编队典型作战模式出发,构建了融合空/天平台的侦查、指挥与控制的全体下的信息化体系,并对全体系下的信息化多导弹协同作战进行了分布式仿真。分布式仿真有效的验证了信息化体系功能,并且考察了信息流量与多导弹协同关系。
[1]刘桐林.库尔斯克核潜艇与花岗岩反舰导弹[J].飞航导弹,2002,(3):34-37.
[2]林涛,刘永才,关成启,关世义等.飞航导弹协同作战使用方法探讨[J].战术导弹技术,2005,(2):8-12.
[3]肖增博,雷虎民,夏训辉.多导弹协同作战关键技术研究与展望[J].飞航导弹,2008(6):24-26.
[4]Kuhl F,Weatherly R,Dahmann[J].计算机仿真中的HLA技术[M].北京,国防工业出版社,2003.
[5]何川,日本的“八·八”舰队[J].电子对抗技术,2005,20卷(2):45-46.
[6]杜朝平,梁桂华.重出江湖的印度航母维特纳[M].名舰档案,2008.
[7]刘颖.主/被动雷达双模导引头[J].航空科学技术,2009:6-8.
>>>作者简介
万建平,1961年出生,本科,高级工程师,现从事装备质量管理工作。
Construction on Information System and Distributed simulation for Cruise Missiles Cooperative Engagement
Wan Jianping
(Navy Representative Office in Wuhan,Hubei Wuhan 430011)
The construction on information system is analyzed for cruise missile cooperative engagement with space flight and aviation platform.It was suggested that the campaign usage procedure used in the information system with cruise missile cooperative engagement.At the same time,constituted four missiles cooperative engagement simulation system using HLA-RTI.The information system function was demonstrated reconnaissance,command and control.This research can be use in the information system constructed with the cruise missiles cooperative engagement.
Information System;Cruise Missiles Cooperative Engagement;HLA-RTI simulation
2011-10-28)
猜你喜欢
小哥白尼(军事科学)(2021年1期)2021-07-16
科学与财富(2021年36期)2021-05-10
小哥白尼(军事科学)(2020年12期)2021-01-18
军事文摘(2020年14期)2020-12-17
兵器知识(2019年1期)2019-01-23
北京航空航天大学学报(2017年3期)2017-11-23
北京航空航天大学学报(2017年10期)2017-04-20
军营文化天地(2017年12期)2017-03-01
军事运筹与系统工程(2016年4期)2016-07-10
海军航空大学学报(2015年4期)2015-02-27