基于AIS的船舶交通流量统计方法研究
2011-08-17 09:37:36李红祥
武汉理工大学学报(交通科学与工程版) 2011年4期
李红祥 方 逊
(武汉船舶职业技术学院1) 武汉 430050) (武汉理工大学航运学院2) 武汉 430063)
目前已有一些研究船舶交通流量统计方法,但据调查,现有的船舶交通流量统计系统存在不稳定、重复统计和漏统计等问题.本文提出了一种基于AIS的船舶交通流量的统计方法,该方法构建一个船舶交通流量统计系统,无需人工到航道现场观测,工作人员在岸上的监控中心即可实时观测到航道内船舶密度和船舶通过状况,既可以人工记录也可以自动记录某一时间段内船舶通过航道某一断面的数量.通过理论研究和模拟软件实验的方法证明了基于AIS的船舶交通流量统计系统的可行性.
1 船舶交通流量统计系统原理
1.1 系统的构成
系统由通过某一观测断面的船载AIS、岸台AIS及开发的应用软件组成,其构成框图如图1所示[1-2].船载 AIS可以提供船舶的位置(经纬度)信息,岸台AIS可以接收该信息,开发相关应用软件使其具有船舶交通流量的自动统计功能就可以在电子海图上实时统计船舶通过某一断面的交通流量.应用软件主要是基于VB,Map X控件,MATLAB和Microsoft Office Access数据库而开发的.
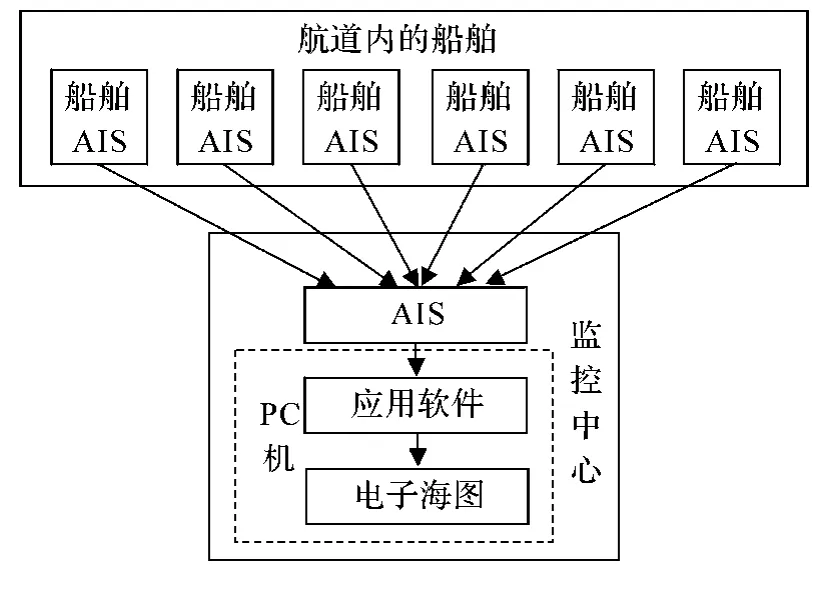
图1 系统构成框图
1.2 系统的工作原理

图2 交通流观测现场图
为了使研究具有实际应用价值,取武汉长江大桥作为观测现场,观测通过大桥处航道断面的船舶交通流量,如图2所示.由于现在通过武汉长江大桥的船舶大多数尚未安装AIS,为了证明系统的可行性,在应用软件中用模拟数据代替AIS的接收数据.
AD为观测断面,XYRS为上行航道,L MNP为下行航道,取上下2个航道断面中点O2,O1为观测中点,画一个覆盖航道大小的圆形观测区,模拟软件将目标船的位置、船名、航向、MMSI等信息作为字段、每一艘船作为一条记录保存到数据库中作为船舶的基本信息,将此数据库与电子海图捆绑在一起.在电子海图中建立船舶层,通过船舶的位置、航向信息将船舶在电子海图的相应位置上显示出来.模拟软件每隔一定周期,采取船舶的信息,并利用MMSI字段将船舶的信息更新到对应船舶的记录中去.利用两次采样的位置差值实现船舶在电子海图上的移动.
船舶在航道中移动,正常情况下一定会经过圆形观测区,模拟软件利用电子海图的空间分析函数Search within Distance判断是否有船舶进入圆形观测区,如果有船舶进入,经过分析、识别船舶后,将船舶流量统计值加1,并将船名记入记录文档以备校验,避免重复计数、漏计数现象出现,从而实现对该航道船舶交通流量的自动统计.
当然,由于信号的不稳定、GPS天线的遮挡、AIS网络堵塞及SOTDMA限制等原因,船舶在通过圆形观测区的过程中可能出现自动交通流量统计中的漏跟踪问题.解决该问题的方法是扩大检测范围提高接收船舶AIS信号的概率,虽然电子海图中的Search Within Rectangle函数可以扩大检测范围,但是对于指定区域难以建立矩形区域,船舶是否通过观测断面分类困难,在此引入感知神经网络快速分类校验的方法.以观测航道断面为分界线,建立一个矩形感知神经网络区域,如图2中下行航道所示,一边为未通过航道断面区域TZNP,另一边为已经通过航道断面区域L MZT,很显然矩形区域面积远大于圆形区域,可以提高对船舶接收AIS信号的概率.当船舶进入感知神经网络区域时即对船舶进行分类处理,对分类后进入通过区域的船舶进行计数记录校验,核对记录文档,该船舶通过圆形区域时是否被记录,如果通过了而未被记录则补充记录.整个校验过程快速、准确、实现了可视化监控,形象逼真.
2 船舶交通流统计具体实现方法
2.1 地物层的建立
首先在电子海图上将观测区域的点、线、圆归入一个层,并显示在电子海图上[3-4],将观测区域的实际位置的经纬度采集下来,如表1所列.

表1 观测区域各点的经纬度
在VB中调用Map X控件,制作地物图层.
REM将一条直线中的点加入点集
land_wpts.Add XY p_x,p_y
REM将点集中的点连接成线段
land_line.Parts.Add land_wpts
REM将线段加入地物层
Map1.Layers.Item(“land”).Add Feature land_line
REM将圆的中心点赋值给点图元
t mp_wpt.Set 114.283456,30.551805
REM画一个60 m半径的圆
Set ftr=Map1.FeatureFactory.CreateCircular Region(mi Circle TypeScreen,t mp_wpt,60,mi Unit Meter,300,Map1.Default Style)
REM将圆加入地物层
Set ftr new= Map1.Layers.Item(“land”).Add Feature(ftr)
在电子海图中建立的观测区域如图3所示.

图3 电子海图上的观测区域
2.2 船舶层的建立
岸台AIS接收到船舶信息经过解码处理后将其保存到 Access数据库中[5-6],取其位置经纬度、航向数据在电子海图上以△符号代表船舶显示出来,△的旋转方向取航向值.
rs.MoveFirst
REM循环读数据库中的船舶位置数据
Do While Not rs.EOF
pt New.Set rs.Fields(“x”),rs.Fields(“y”)
REM在对应的位置显示船舶符号
Set ftr new = ff.CreateSy mbol(pt New,Map1.Default Style)
REM加入船舶层
Set ftr new =lyr New.Add Feature(ftr new,r vs)rs.Move Next Loop
建立的船舶层如图4所示,同样将2次采样之间的位置差值作为偏移量,使用obj.Offset△X,△Y可以实现船舶在电子海图上的移动.本模拟软件则是在航道中取的位置值代替实际接收的位置值.

图4 二种特殊情况的船舶通过模拟图
2.3 船舶交通流量的统计方法
在如图3所示的圆形观测区域,当有船舶经过该区域,系统将会自动对该船进行识别,并记录该船名,船舶流量统计值加1.
当船舶正常通过圆形区域时,使用语句:
center_point1.Set 114.283456,30.551805
Set mon_down_ship= Map1.Layers.Item(“ship”).Search Within Distance(center_point1,60,mi Unit Meter,miSearch TypePartially Within)
根据mon_down_ship的值可以判断观测圆形区域内是否有船舶存在,为了准确记录通过观测断面的船舶,选定的圆形观测区域不能太小,否则可能无法覆盖航道,且对于速度较快的船舶容易出现前后两次采样时船舶均不出现在观测圆形区域的情况,即跳跃过观测圆形区域,造成漏统计;当然也不能太大,否则会出现采样时多艘船舶同时出现在观测圆形里面的情况,造成重复计数.
结合该航道船舶的速度,将观测区域选定为半径60 m的圆形区域较合适,如图3中⊙所示.
正常情况下每次采样时mon_down_ship=0或者1或者2,如果采样时mon_down_ship=1,即观测圆形区域内只有一艘船的情况,则检查记录文档中该船舶是否被记录,如果已经被记录则无需记录,否则记录数加1,并且将其船舶名字记录到记录文档中.
如果采样时mon_down_ship=2,即观测圆形区域内同时有两艘船舶的情况,则检查记录文档中有没有前面一艘船舶的记录,如果已经被记录则无需记录,否则记录数加1,并且将其船舶名字记录到记录文档中.
为了模拟mon_down_ship=2情况,将上行航道的观测圆形区域的半径设置为160 m,如图4所示,△4,△5同时出现在一个观测圆形区域内,多次试验证明该方法记录准确,没有出现重复计数的情况.
为了模拟因为接收不到AIS信号等原因造成的漏统计情况,在下行航道中使用一艘速度较快的船舶、前后两次采样时船舶均不出现在观测圆形区域,即跳过观测圆形区域的情况,如图4中△7船.
模拟试验表明,本方法无法记录△7船跳过观测断面这种特殊情况,造成漏统计现象.因此,为了避免漏统计现象,必须对交通流量的统计数据进行核实校验,补充漏掉的记录数值.
3 交通流量统计值的校验
3.1 感知神经网络的建立
为了有效的校验统计的船舶交通流量,提出一种利用感知神经网络的校验方法,船舶交通流量的统计是以航道断面作为分界线,船舶分为未通过、通过两类,属于典型的线性可分问题,使用单层感知器即可处理船舶的分类问题.通过建立一个感知神经网络区域,选取合适的样本值来调整权值和阀值,使分界线恰好位于观测交通流量的航道断面,船舶进入该感知神经网络区域,船舶的位置作为输入样本数据,感知神经网络可以快速将其分为未通过船舶和通过船舶.
单层感知器的数学模型为:设输入向量X=(x1,y1)T,则2个输入分量在几何上构成一个二维平面.输入样本(船舶)可以用该平面上的一个点表示.节点的输出为

如图5中的L MZNPT为所建立的感知神经网络区域,由于实际观测位置决定了该区域不是一个沿经纬线建立的矩形区域,直接使用样本空间值归一化较困难,所以采取先将其旋转到经纬线上,再进行归一化处理的方法.

图5 建立的感知神经网络区域
该区域6个点位置经纬度如表2所列.

表2 感知神经网络区域位置点
通过计算,该区域需围绕TZ中点O1(114.283 455 555 556E,30.551 805 555 555 6N),顺时针旋转57.49°,从而得到一个新的区域,如图5中的L′M′Z′N′P′T′.该区域满足L′,T′,P′,M′,Z′,N′各自在同一经度线上;L′,M′,T′,Z′和P′,N′分别在同一纬度线上.旋转后的各点坐标如表3所列.

表3 旋转后各点位置信息及归一化结果
旋转后得到的是一个对应于经纬线的标准矩形区域,横坐标对应于经度,纵坐标对应于纬度,从而可以容易地对该区域内的样本数据进行归一化 处 理, 如 L′(114.289 325 000 000E,30.552 344 444 444 4 N)对应于XY坐标轴中的L′(1,1),区域各边界点L′M′Z′N′P′T′归一化后的值见表3,而船舶的实际位置值经过旋转、归一化处理后可以容易地被分类.
3.2 感知神经网络的程序实现
MATLAB是一个具有强大功能的数学处理软件,神经网络工具箱是Matlab环境下开发出来的许多工具箱之一,它以人工神经网络理论为基础,应用Matlab语言构造典型神经网络的传递函数,并针对特定的网络结构进行网络设计、学习、训练和仿真.
REM选择合适的样本空间数据P,按T规则分类

REM使用newp函数建立一个感知器神经网络,默认使用硬限幅传递函数har dli m,感知器权重及偏置.
net=newp([-1 1;-1 1],1);
REM在已绘制的图上加上感知器分类线
handle= plotpc(net1.iw{1},net1.b{1});
REM利用样本点训练网络并绘出得到的分类线
REM adapt是神经网络自适应函数,sse是网络平方和误差函数
E=1;
while(sse(E))
[net,Y,E]=adapt(net,P,T);
Handle=plotpc(net.iw{1},net.b{1},handle);
end;
REM将船舶位置数据shippoints进行分类并得到结果
ans=sim(net,shippoints)
MATLAB与Visual Basic语言接口可以采用DDE(Dynamic Data Exchange),DDE允许 Microsoft Windows应用程序通过交换数据实现彼此间的通信.
在本模拟软件中,VB通过DDE将进入感知神经网络的船舶位置数据传递给MATLAB并发出分类的指令,MATLAB将分类的结果通过DDE传递给VB,并将分类结果以图形的形式显示出来,如图6所示,可以清楚地看到上行航道感知神经网络中一艘船通过、两艘船未通过的情景,分类结果为[0 0 1],这和电子海图上的船舶通过情况完全一致.
3.3 船舶交通流统计数据的校验
只要船舶进入感知神经网络区域内,就被分类为未通过、通过两类,如图6所示在下行航道感知神经网络区域内的△3、△7船舶均为通过类型.
对于在感知神经网络中被分类到通过类的每一艘船,则核对记录文本中船名是否被记录,如果被记录则属于在通过圆形观测区域时被正确记录的船舶,如果未被记录,例如图6中的△7,则是因为其通过圆形观测区域时跳过了该区域而未被记录,属于漏记录情况,在此需要补充上统计值记录,同时将船名记录到记录文本中.
在正常情况下船舶经过圆形观测区都会被记录.该软件在实际应用时,虽然实际环境更为复杂,存在不同的船舶尺度、航速和船舶类型,但由于感知神经网络的区域远大于圆形观测区,即使是在特殊情况下漏记录,也会被感知神经网络校验.在实际应用中,可以取1 d、1周、1月等时间段统计船舶交通流量的值,根据撑握的数据还可绘出该地段交通流量的规律(如泊松分布、正态分布等),以更好的为海事管理部分服务.

图6 感知神经网络校验过程图
4 结束语
由于内河大多数船舶暂时还没有装载AIS,采用了模拟的方法来证明基于AIS的船舶交通流量统计系统的可行性.基于长江干线的AIS网络正在建设中,由于本模拟环境是以实际场景作为背景,很容易与AIS网络连接,具有一定的现实意义.
基于AIS的船舶交通流量统计系统如在海事部门进行推广,将为海事部门大大节省人力资源,特别是在天气恶劣的情况下,系统可能效改善船舶流统计工作者的工作环境,减小统计工作者的工作强度,提高统计的准确度.
[1]孙文力,孙文强.船载自动识别系统[M].大连:大连海事大学出版社,2004.
[2]张 勋,许文海,唐文彦.浅海航道水深实时监测方法研究[J].仪器仪表学报,2006,27(6):361-363.
[3]杨春金,潘 玲.Map X在电子海图中的应用与实现[J].船海工程,2006,35(6):116-118.
[4]朱恩亮,王 勇,王光耀.基于Map X的电子海图显示系统开发[J].船海工程,2008,37(5):127-129.
[5]徐志京,周薇娜.AIS输出信息的采集及处理技术研究[J].航海技术,2006(2):29-31.
[6]吴建华,陶德馨.自动船舶识别系统的信息解码技术研究[J].武汉理工大学学报:交通科学与工程版,2007,31(4):595-598.
猜你喜欢
航海(2020年4期)2020-08-17 16:13:40
建材发展导向(2019年11期)2019-08-24 06:34:56
少林与太极(2018年9期)2018-09-28 08:37:34
中国交通信息化(2018年7期)2018-09-14 02:54:54
广东第二课堂·小学(2017年9期)2017-09-28 16:17:38
儿童故事画报·发现号趣味百科(2016年7期)2017-02-08 09:08:39
小雪花·成长指南(2016年11期)2016-12-07 06:29:51
孙子研究(2016年4期)2016-10-20 02:38:06
数学大王·低年级(2016年1期)2016-09-10 07:22:44
工业设计(2016年11期)2016-04-16 02:50:07