单点源模拟多点源诱偏仿真试验方法的研究*
2011-08-10 09:22王雷钢申绪涧崔建岭张晓芬
舰船电子工程 2011年11期
王雷钢 申绪涧 崔建岭 张晓芬
(63892部队 洛阳 471003)
1 引言
反辐射导弹是一种硬杀伤的电子战武器,目前已经成为战场雷达的主要威胁,基于此,多种对抗反辐射导弹技术措施也相继被应用。有源诱偏是一种相对简单有效的抗反辐射导弹方法,能够使来袭导弹无法瞄准目标或诱饵,从而保护目标雷达。许多国家为保护技术先进、造价昂贵的雷达系统还研制了专门的诱偏系统,我国自越南战争中美军使用百舌鸟反辐射导弹开始,就开始重视抗ARM技术的研究,主要集中在雷达关机和雷达诱偏两个方面。针对反辐射导弹的抗诱偏能力评估,多采用全数字仿真方法,同时针对具体的仿真过程,提出了空间分离点概念[1],但如何在辐射式仿真系统进行半实物仿真试验,尚未作具体分析。
2 辐射式仿真系统开展诱偏仿真试验分析
2.1 反辐射导弹闭环仿真试验过程
反辐射导弹工作过程是由导引头获取目标信息,经处理输出为角度偏差信号,经制导装置形成控制信号来驱动操纵舵面,从而改变空气动力和力矩控制导弹的飞行姿态,通过姿态的变化来控制飞行轨迹,最终将导弹引向被攻击目标。
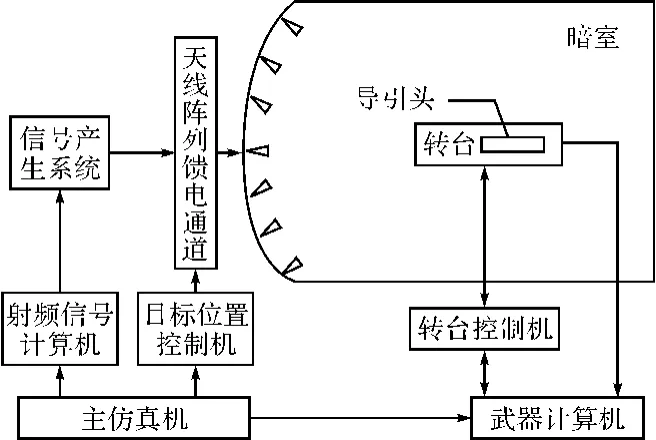
图1 反辐射导弹半实物闭环仿真试验示意图
在辐射式仿真系统内开展仿真试验时系统构成如图1。根据设定的战情,天线阵列和馈电控制系统辐射出一个包括诱饵的逼真目标信号,三轴转台模拟反辐射导弹的角度姿态;反辐射导弹对被攻击目标进行跟踪,在该阶段由导引头测量目标的位置,并由制导系统根据所测雷达位置,产生对舵伺服系统的控制信号,该控制信号经I/O适配计算机送入武器计算机,由武器计算机的舵伺服系统、空气动力学、运动学、动力学及惯性传感器实体/数学模型产生反辐射导弹的六自由度运动姿态数据,其姿态信息送导弹转台控制计算机。图2为反辐射导弹半实物闭环仿真试验信息流。
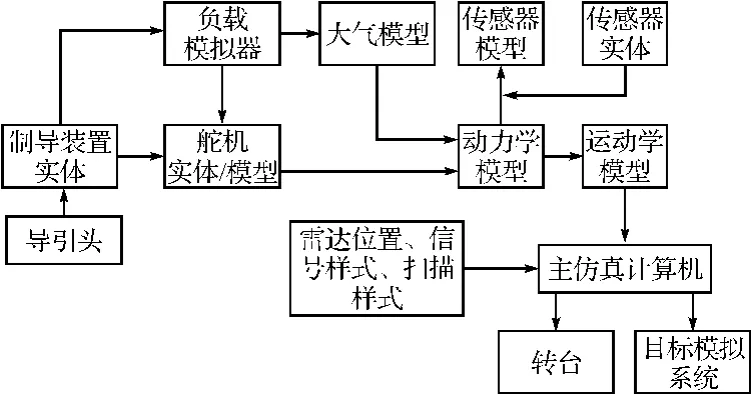
图2 反辐射导弹半实物闭环仿真试验信息流
2.2 内场开展诱偏仿真试验局限性
反辐射导引头既要实现跟踪又要搜索,所以一般采用超宽带天线,目前反辐射导引头覆盖频率为2~18GHz,所以灵敏度较低,随着反辐射导弹逼近目标,视场角在不断扩大,表现在辐射式仿真系统中就是模拟目标及诱饵的喇叭天线与转台之间的立体角度越来越大,这就需要很多的喇叭天线参与。目前的辐射式仿真系统多采用天线阵列的三元组天线合成来模拟目标信号/回波,通常导引头视场角在60°左右,分辨角在12°以内[2],所以就反辐射导弹仿真试验而言,就要求天线阵的范围不能过大也不能过小,同时天线阵内的天线数目也不能过稀(会使角模拟精度低),考虑到传播中的大气衰减以及馈线、元器件衰减,因此在每个天线后端都需要加功放器,这也将直接增加仿真试验系统的经济成本。
2.3 单点源实现多点源可行性
反辐射导引头因受工作模式和体积限制,天线尺寸较小,分辨角大,当在其分辨角范围内有多个有源诱饵时,它将跟踪辐射源的能量中心而偏离辐射源,所以如果不考虑信号样式和体制,仅从能量合成的角度来讲,反辐射导引头的瞄准轴总是要指向各个辐射源在反辐射导弹导引头处合成电场强度的等相位面的法线方向,所以如果假定导引头动态角度分辨力处于理想状态,对导引头而言,在每个时刻导弹、雷达之间的方向是确定且惟一的,所以在辐射式仿真系统中用单点源来辐射的雷达及诱饵系统的合成信号是可行的。
在ARM飞行过程中,起初反辐射导弹与目标的距离很远,各个点源都在导弹的视场角内,在运动过程中导弹的分辨角依次将诱饵(或雷达)分辨出,并最终从剩余的两个辐射源中分辨出一个进行攻击[1]。在整个过程中描述的要素有:导弹速度矢量、导引头指向、导弹位置,参与合成的辐射源。导弹当前速度及位置决定过载及下一时刻导弹位置、是否有诱饵被分离,导弹位置与辐射源合成场决定合成场的法线方向,法线方向又与过载量决定下一时刻导弹速度方向。
在辐射仿真系统中以转台中心、单点源间的固定方向来等效模拟时刻变化合成场在导弹处的法线方向,通过转台姿态的变化等效构建合成雷达在弹体坐标系位置角度状态,可以开展诱偏仿真试验来考核反辐射导弹性能以及诱饵布局方案效果。
3 内场实现方法
导弹逼近目标的运动过程可分解为平动和转动,在辐射式仿真系统中利用单点源开展多点源的诱偏的整个过程中反辐射导弹速度、位置是时刻改变的,但这只能在数学模型内进行这种平动描述;每一时刻,由于安装反辐射导弹的转台位置固定,所以内场所能模拟的电磁波阵面在导弹处的法线方向是无法改变的,而在实际的导弹飞行过程中这一法线是时刻改变的,而辐射式仿真系统中能改变的只有导弹的姿态,所以要将所有的改变都转化到转台的姿态变化中以构成一个相对的位置关系,导弹的导引头和制导装置感知这一角度信息,形成舵机控制指令,经过空气动力学模型,输出下一时刻导弹姿态角度。内场就是构建导引头实际指向与导引头实测目标指向之间的一种相对关系,如图3所示。
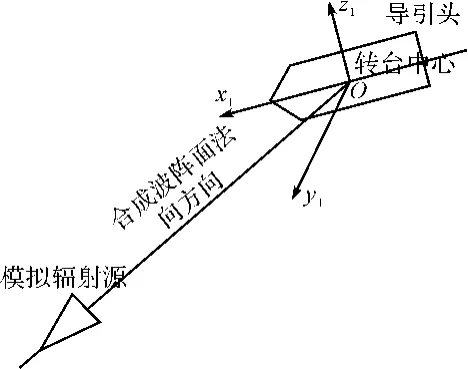
图3 导引头方向与合成波面法线方向关系示意
在整个仿真试验过程中,每个仿真周期内都要完成两方面仿真要素的解算:
1)计算在每个周期Tk时刻导引头处合成电场强度等相位面的法线向量λk,并由此确定下一周期时刻速度方向。
(1)合成场的阵面法线λk
合成场法线计算:假定每个点源在ARM导引头处的电场强度为[3]:

则有源诱饵系统在ARM导引头处合成电场强度的相位为:
导引头处合成电场强度等相位面的法线向量为:

空间分离点计算:它与合成场的法线与导弹位置、导弹瞄准轴有关。假设雷达(xR,yR,zR)及诱饵站位置(xi,yi,zi)(i为诱饵个数),反辐射导弹某一时刻Tk位置(xk,yk,zk),以上均为空间大地坐标系内坐标,可以由此计算出雷达及诱饵与反辐射导弹之间的空间矢量Li,此时导弹瞄准轴方向为λk,判断此时的arccos(Li,λk)是否存在小于导引头分辨角Δθ/2的目标,如果有则剔除并重新合成余下的雷达站和诱饵。
(2)导弹速度方向确定
计算λk与导弹速度方向夹角,如果其大于在当前速度Vk和最大过载Nmax下在仿真周期ΔT内的可转动最大角度θmax=NmaxΔT/Vk,那么在下一时刻的速度方向不能指向λk,而只能以最大过载所能转动角度量靠向λk,作为导弹运动学模型的输入量,直接关系下一时刻导弹位置。整个过程与计算流程如图4。
图4 空间分离点与导弹速度方向计算流程
2)计算λk在弹体坐标系内与三个坐标轴夹角
为了表述这种关系,将这些元素统一转换到弹体坐标系进行描述,这就涉及到大地坐标系、空间直角坐标系,地面坐标系。通常雷达、诱饵、导弹的位置在大地坐标系内描述,导弹姿态在地面坐标系内描述,描述参数有偏航角ψ、俯仰角ϑ、横滚角γ、速度、角速度都是相对于此坐标系来衡量的。
(1)大地坐标系转化到空间大地直角坐标系:
式中:RN为地球曲率半径,e为第一偏心率,L,B,H为经纬度、高程。
(2)空间大地直角坐标系转化到地面坐标系:
假设地面坐标系原点(B0,L0,H0),坐标系X轴沿水平面指向正北,Y轴沿铅锤线方向指向地球外,Z轴在水平面内与X轴垂直。

式中:
(3)地面坐标系转化到弹体坐标系:

在某一时刻假设弹体位置M为(Bjti,Ljti,Hjti),在导引头实测目标方向导引头处合成电场强度等相位面法向线λk上取一点T空间大地坐标系(X0,Y0,Z0),则目标T在弹体坐标系内坐标为:

进而可以求出合成场法线方向与导弹弹体坐标系的角度关系,偏航方向上:Cαi=atan(Yjt/Xjt),俯仰方向上
在内场开展仿真试验,可以通过转台的转动来改变导弹的弹体坐标系,如果单点源在转台初始零位坐标系内角度为(Cα0,Cβ0),那么在仿真试验过程中转台指令角度为(Cαi-Cα0,Cβi-Cβ0),从而实现导弹姿态与目标之间角度关系的模拟构建。
4 结语
通过对辐射式仿真系统内场进行诱偏仿真试验过程及特点分析可知利用单点源模拟多点源进行诱偏仿真试验是可行的,并提出了具体的实现方法,这种方法是假定导引头有理想的动态角度分辨力,它可以用于导弹的制导控制系统以及诱饵布局设计方案的考核。由于转台姿态的变化是为了等效构建合成目标在于弹体坐标系内的方位俯仰信息,而非导弹在空中的真实相对大地的航向角、俯仰角,这样如果敏感部件实体也为试验考核对象,则还要进一步研究解决其在转台上的安装问题。
[1]阎晓蕾,李军,龙方.基于空间分离点的似点源诱偏性能研究[J].现代雷达,2007,29(2):29~31
[2]任刚强.雷达有源诱饵系统对抗反辐射武器仿真研究[D].西北工业大学硕士论文,2005,3
[3]闵涛,姜文利,周一宇,等.诱偏反辐射导弹三点源诱饵系统布站研究[J].航天电子对抗,2003(3):13~15
[4]吴迪军,侯慧群,李彦志,等.三点源诱偏抗反辐射导弹合成场计算与仿真[J].电光与控制,2008,15(5)
[5]刘兴堂.精确制导、控制与仿真技术[M].北京:国防工业出版社,2006,2
[6]肖卫国,尔联洁.雷达制导半实物仿真误差分析[J].系统仿真学报,2007,19(11):259~p263
[7]李萍,许家栋,张麟兮,等.射频仿真系统目标驱动方法研究[J].计算机仿真,2006,23(11):54~65
[8]刘延斌,金光,何惠阳.轴仿真转台指向误差的建模研究[J].哈尔滨工业大学学报,2005(5):701~704
[9]王雷钢,杨黎都,傅亦源.射频仿真系统中的弹目偏角修正方法研究[J].舰船电子工程,2010,30(4)
[10]黄隽,张浩然,胡云安,等.基于 MPI与OpenMP的飞机电磁软杀伤动态评估分析[J].计算机与数字工程,2010,38(12)
[11]赵军仓,樊红社,等.射频仿真系统中目标的研究[J].陕西理工学院学报,2006,22(2):19~22
猜你喜欢
装备制造技术(2022年5期)2022-09-06
科普童话·神秘大侦探(2022年4期)2022-05-26
作文小学高年级(2022年2期)2022-03-03
数学教学通讯·高中版(2018年11期)2018-01-15
现代防御技术(2016年1期)2016-06-01
制导与引信(2016年3期)2016-03-20
大众文艺(2016年23期)2016-03-02
火控雷达技术(2016年1期)2016-02-06
弹箭与制导学报(2015年1期)2015-03-11
弹箭与制导学报(2015年1期)2015-03-11