作战方案智能推演技术研究*
2011-08-10 09:22张路青
舰船电子工程 2011年11期
张路青
(武汉市74223信箱 武汉 430074)
1 引言
为了明确作战任务,分析作战方案,检验作战计划,预估作战效果,在作战行动实施之前,有必要进行作战方案模拟推演,以提供科学可靠的辅助决策建议。但是现行的预先制作的作战方案规划无法将人的因素、动态环境因素、任务目标与系统能力之间的协调因素完全容纳,因此在作战任务计划出来后,如何确保作战任务计划的有效完成,如何保证相关指挥人员和保障部门对任务计划的关键部分进行操练和协同执行,这都是预先作战计划无法保证的,这时就需要针对作战任务计划进行在线模拟推演。
上世纪80年代以来,美军就在其武器装备系统中嵌入推演模拟模块,并用于辅助决策以及在线仿真训练,并取得了较好的效果。其陆军的推演模拟系统在美军中被广泛应用,该系统包含一些大型的、复杂的计算机模型,这些模型可模拟营、旅、师、军和军以上的作战行动,主要用于各级指挥所的训练和演习。美军涉及到推演模拟训练具体的型号系统主要有旅营战斗模拟系统(Brigade and Battalion System,BBS)、军团战役模拟系统(Corps Battle System,CBS)、“两面神(JANUS)”模拟系统等。
近年,我国对作战模拟和智能化在线推演评估与辅助决策方面的研究投入也很大,并取得了一定的进展,同时建成了一批作战模拟训练系统。例如,国防大学研制的“SDS2000战略决策综合集成研讨与模拟环境系统”和南京陆军指挥学院等院校联合研制的“分布交互式作战指挥训练模拟系统”。但在海军指控系统领域的发展还比较落后,目前的作战方案编制过程复杂,实时性与智能化程度不高,方案拟制与当前态势脱节,方案优选只能由指挥人员自己主观定性判断,而且没有形成多台位甚至多平台的方案同步推演、优化与合作决策体系。因此研究一个开放、灵活的作战方案在线推演体系,可以支持对作战方案优选和优化的支持,提高方案的可信度。
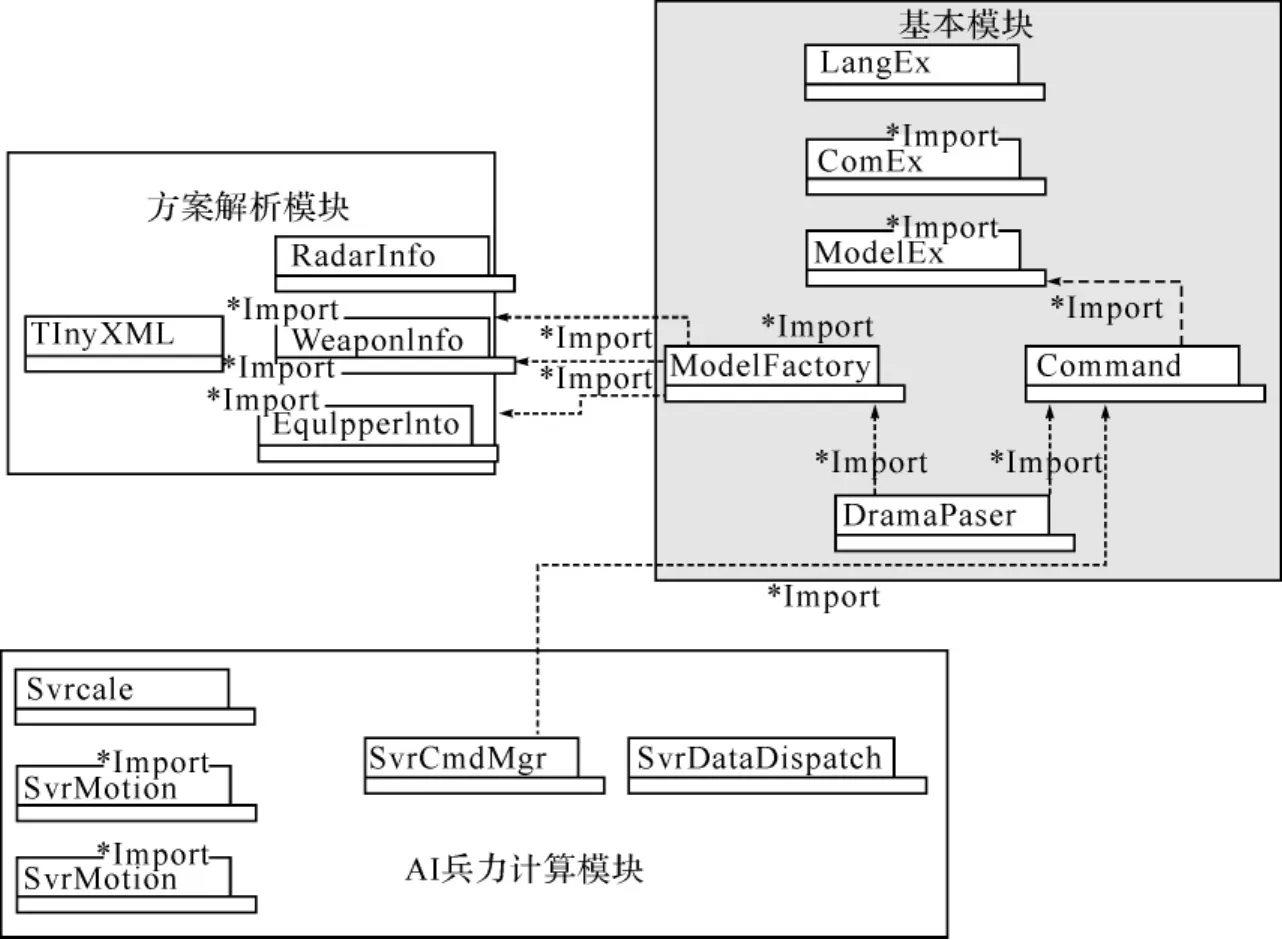
图1 作战方案智能推演体系架构
2 智能推演技术总体架构
作战模拟推演是指在作战行动实施前或实施过程中,按作战计划意图、方案、顺序和进程,对后续各个作战阶段中作战部署和作战行动所造成的状态进行演练分析的过程。
方案智能推演是基于作战模拟和智能兵力的方式对作战方案进行推演预测,利用战术规则知识、基于知识的推理和面向任务的决策支持(Decision Support,DS)等技术为指挥人员提供作战分析、方案优选时的智能化辅助决策。
方案智能推演技术的研究目的是能够解析态势整编计算机软件下发的推演方案,并能进行有一定的仿真精度并且可控的模拟推演。图1是作战方案智能推演体系架构图。
作战方案智能推演主要包括基本模块、方案解析模块和AI兵力计算模块。其中AI兵力计算模块包括实体模型和实体运算模块;方案解析模块包括实体解析模块和命令解析模块。当接收到作战方案后,方案解析模块将方案解析为兵力实体和命令分解,兵力实体将由AI兵力计算模块进行驱动推演,在推演过程中基本模块将控制推演的进程,并将命令以类似“事务处理”的方式进行命令回压,以“分解”产生的“动作”来驱动推演过程。本架构的可扩展性和可控性较强,推演过程完全按照推演方案的内容来执行,在推演过程可以很简单地通过回压新的“命令”来改变推演行为。
3 智能推演关键技术研究
3.1 实体模型和实体工厂
实体模型是软件内部使用的运算对象模型,对应现实中的各种作战平台,如:“战斗机”、“驱逐舰”、“核潜艇”等。实体模型的属性配置是以XML格式进行部署。其实体模型的具体设计如图2所示。
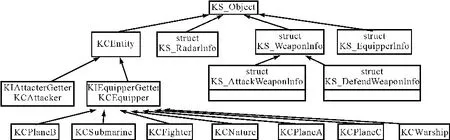
图2 实体模型
我们将实体模型分为传感器模型、武器模型、平台模型和装备模型。各模型又派生出其他模型,如武器模型可以派生攻击武器模型和防御武器模型,装备模型可以派生出飞机模型、舰船模型等。
实体工厂负责对某一个实体进行“装配”。当解析到一个实体的时候,实体工厂将根据解析进行模型选择,获取到系统需要的实体。如我们在作战方案中解析到一艘舰船,我们将选择“平台模型”赋予它运动特性,然后选择相应的武器模型和传感器模型,最终我们获得了这艘舰船的实体。
3.2 实体运算
实体运算主要涉及到运动平台的运动学模型、导弹弹道模型、传感器探测模型以及毁伤模型等。本文主要介绍平台运动学模型和传感器探测模型,这两个模型主要驱动平台的运动解算和和传感器探测解算。
1)实体运动解算
本文采用MMG运动数学模型来建立实体运动解算。MMG(舰艇操纵运动数学模型)算法建立和描述舰艇的运动动力学模型。这种模型能很好的响应各种因素对运动的影响,尤其是外部环境对运动的影响。
MMG算法建立在双坐标系体系下。如图3所示。
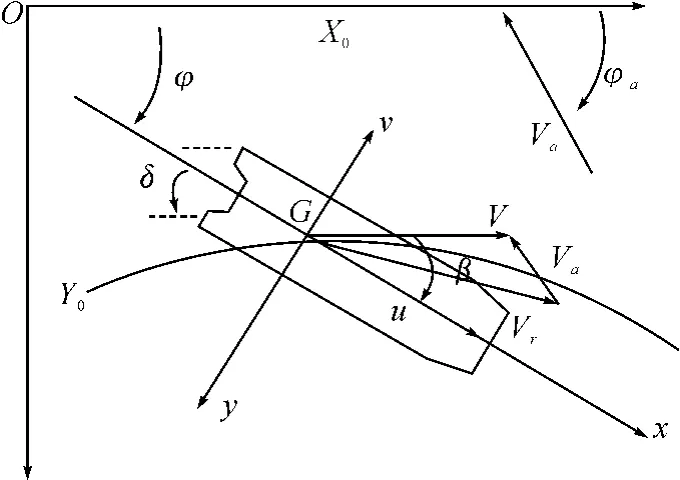
图3 MMG算法坐标系
如图所示,一个坐标系是固定于地球的固定坐标系Oo-xoyozo,如图中正东和正南坐标系;是与船体一起运动的O-XYZ,坐标原点与舰艇重心重合,如图中船体所处的坐标系。
假定船体运行在无限深广水域,船体为刚体,自由液面为静水面,并且忽略舰艇摇荡的影响,其基本运动方程为
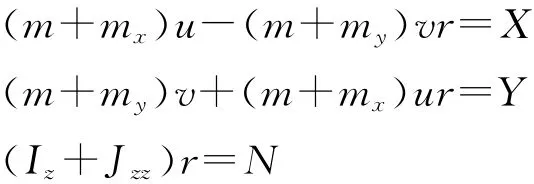
其中,m是舰船的质量、mx,my是x和y方向的附加质量、Iz是z轴上的转动惯量、Jzz是z轴上的附加转动惯量。u和v表示喘振和摇摆速度,而r表示偏航角速度。X和Y是在参照系中作用在舰船上的外力向量F的分量,而N是z轴的动量。
2)传感器探测解算
传感器探测解算主要是指传感器发现目标的概率解算。传感器探测概率或称雷达截获成功概率定义为雷达从发现目标或接收目标指示至转入稳定跟踪的过程具有概率或统计特性,在规定的指示精度条件下转入跟踪成功的概率。通常,雷达的照准概率服从正态分布,即满足以下表达式:

式中:Pt为目标落入搜索区域的概率;Pdi为第i次与目标接触时的发现概率(1≤i≤n)。
几点说明:
1)目标落入搜索区域的概率
目标落入搜索区域的概率Pt在许多情况下为1,但有些情况下小于1。例如,按上级指示搜捕目标,由于存在各种观测误差与随机扰动,所指示的目标位置不能准确无误,这时按所指示的目标位置确定的搜索区域不一定能覆盖住目标,对其落入概率要进行分析计算,可由战前积累的先验知识估出。
2)接触条件下的发现概率
接触条件下的发现概率即目标落入视场被探测到的概率取决于雷达系统的类型以及战术技术性能。
3.3 基于XML的方案解析
XML是一种带标签的解析型语言和文件格式,以易编辑和易读性著称,而且也屏蔽了平台差异。我们采用XML解析技术,将运动模型、武器模型、雷达模型等属性参数,以XML的格式嵌入到系统中,通过对XML文件中各种参数的修改来调整各种模型,使得模型的可扩展性得到极大的提升。
方案解析是用来对“输入”的作战方案进行分析,对“兵力”相关信息调用“实体模型和实体工厂”生成“实体”,并临时保存在态势实体结构中。对于方案中非“兵力”信息的内容就会以“命令”的方式进行解析,“命令”如下:
1)指挥控制类:攻击、防御、改变防御模式、改变雷达状态、改变干扰状态、报告命令、口头指令等;
2)运动干预类:改变速度、改变高度、改变水平方、改变垂直方向、移动命令、水平航向修正、垂直航向修正等;
3)演练过程干预类:演练状态、时序、阶段改变命令、合理性调整等。
4 结语
针对现有指控系统中辅助决策存在的自动化和智能程度较低、作战计划生成与方案优选能力较弱、缺乏在线推演与评估功能等问题,本文开展了作战模拟推演技术研究,通过对AI兵力生成技术和在线作战推演等技术的研究,建立了一个可扩展和可控的作战方案智能推演系统,为作训参谋提供一个快速的演示作战计划的平台,通过对作战计划快速、灵活的推演,以直观的方式对推演进程进行干预,辅助作训参谋查找和发现计划中的缺陷,进而对计划进行修改和完善。本系统可辅助参谋人员检验和完善作战计划,从而代替传统的沙盘推演和图上推演,为方案制定的合理性以及跨平台方案协同会商等提供了基础技术支撑。
[1]KunJin Kang,SunYoung Kim,YoonRak.Choi“Seakeeping and Maneuvering Performances of the 2,500 Tons Class Trimaran”[C]//Proc.of Workshop IWSH'2001,Wuhan,China,2001:38~44,2001
[2]Air Force Task List(AFTL).Air Force Doctrine Document 1-1[Z].1998
[3]王小非,陈炜,等.海军作战模拟理论与实践[M].北京:国防工业出版社,2010
[4]胡晓峰.战争模拟引论[M].北京:国防大学出版社,2004
[5]杨凡,常国岑,段瞍,等.分布式作战方案自动生成系统策略协同研究[J].系统工程与电子技术,2005,27(3):467~47
[6]罗勤,陈炜,等.海战场作战仿真中的兵力实体建模研究[C]//中国造船工程学会电子技术学术委员会年会论文集,2009:242~244
[7]庞国峰,郝爱民,梁晓辉.计算机生成兵力系统自治实体行为描述原语[J].系统仿真学报,2000,12(4):296~300
[8]陈欣.基于XML的仿真想定标记[J].系统仿真学报,2004,16(9):1928~1930
[9]罗玉臣,陈炜,陈云秋.海军作战模拟的模型体系设计[C]//中国造船工程学会电子技术学术委员会年会论文集,2006:377~379
[10]李殿璞.船舶运动与建模[J].哈尔滨:哈尔滨工程大学出版社,2005
猜你喜欢
中学生数理化·高一版(2021年4期)2021-07-19
科教导刊·电子版(2020年24期)2020-10-21
中国外汇(2019年18期)2019-11-25
当代陕西(2019年5期)2019-03-21
语文世界(小学版)(2018年3期)2018-03-22
商周刊(2017年12期)2017-06-22
领导决策信息(2017年9期)2017-05-04
领导决策信息(2017年9期)2017-05-04
福建中学数学(2016年7期)2016-12-03
航空知识(2001年4期)2001-06-07