一类T-S模糊双线性系统的鲁棒控制
2011-07-23 00:28:32马进峰俞纯权
山东理工大学学报(自然科学版) 2011年6期
马进峰,俞纯权
(山东协和学院经济管理学院,山东济南250107)
近年来,双线性系统及其研究被广泛地应用于许多领域,如生物工程、生化工程、社会经济学等方面.双线性系统是一类比较特殊的非线性系统,介于线性系统和非线性系统之间,其数学模型的非线性部分通常为系统的状态和输入的双线性函数.一般而言,双线性系统模型比一般的非线性系统结构简单、动态特性简单,同时描述对象的近似程度往往比线性系统要高的多[4].
非线性是工业控制中普遍存在的的现象,对于非线性系统的研究是控制理论中一个十分重要的课题.基于T-S模型的模糊控制是研究非线性系统比较成功的方法之一,应用T-S模型对非线性系统进行稳定性分析和控制器设计方面,已有很多成果面世.同时,由于不确定的存在,鲁棒性问题也成为带有不确定模糊系统所研究的热点问题.但是目前很多T-S模糊模型中,模糊规则的后件部分多是一个线性函数.文[1] 研究了一类模糊双线性系统的鲁棒稳定性问题,其模糊规则的后件部分是一个双线性模型,但是在其给出的系统稳定LMI条件中,要求已知控制器的增益,很显然这个条件约束性太强.
综上分析,本文研究一类用T-S模型表示的模糊双线性系统鲁棒H∞控制问题.针对模糊双线性模型,研究其鲁棒稳定的条件,并且根据并行分布补偿算法给出了鲁棒控制器的设计,控制器可由一组线性矩阵不等式的解给出.本文和文[11] 相比,其不同之处在于:①控制器的增益可以通过线性矩阵不等式直接解出;②研究了系统的性能鲁棒性.最后,由数例仿真验证了结果的有效性.
注1:在本文中,Rn表示n维Euclidean空间,P>0(P≥0)表示是一个正定(正半定)实对称矩阵.在矩阵表达式中,用“*”来表示对称项,用diag{…}来表示对角阵.如果不做特别说明,矩阵均表示合适维数的矩阵.‖‖2表示欧氏范数.用来表示用来“I”来表示单位阵.如果不做特别说明,矩阵均表示合适维数的矩阵.
以下给出在证明中要用到的引理:
引理1[12]设M,N和F(t)是维数适合的实矩阵且满足FT(t)F(t)≤I,则对于标量ε>0,有如下不等式成立:
MTF(t)N+NTFT(t)M≤εMTM+ε-1NTN.
引理2[13]设A,D,E,F是合适维数的实数矩阵,且FT(t)F(t)≤I,则有矩阵P>0,对于标量ε>0满足εI-HTH>0时,有如下不等式成立:
(A+DFE)TP(A+DFE)≤ATPA+ATPD(εIDTPD)-1DTPA+εETE
1 系统的模型描述
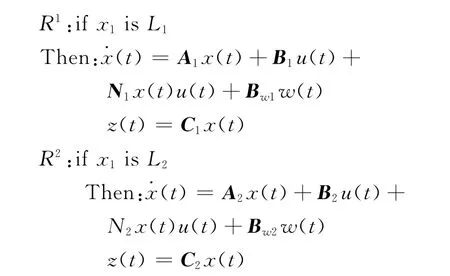
由T-S模型描述的不确定模糊双线性系统,它的第i条规则可描述如下:
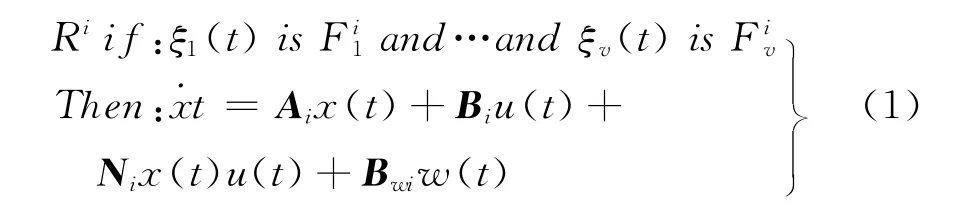
z(t)=Cix(t) i∈I:={1,2,…,s}
假设:前提变量ξ(t)和控制变量及扰动变量无关;
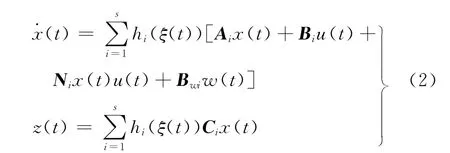
通过单点模糊化,乘积推理和中心平均反模糊化方法,模糊控制系统的总体模型为
根据文[11] 的思想,根据并行分布补偿算法,考虑模糊控制器:
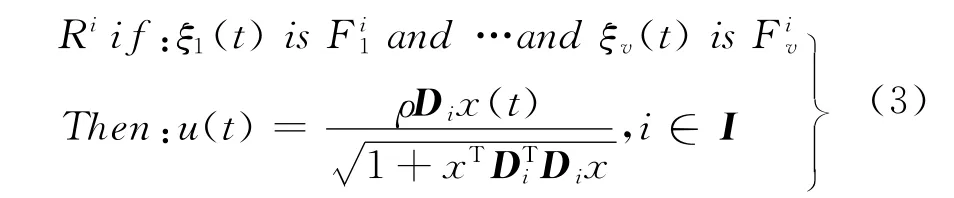
则整个系统的状态反馈控制律可表示为
这里
Di∈R1×n是待定的控制器增益,ρ>0是待求的标量.
在控制律(4)的作用下,整个闭环系统的方程可表示为

定义1 对于给定的常数r>0,以下条件满足:
①ω(t)≡0时,闭环系统(5)是渐近稳定的;
②在零初始条件下,对任意非零ω(t)∈L2[0,∞),满足‖z‖2<r‖w‖2.
则称系统(5)在H∞性能指标r下鲁棒稳定.
本文目标:设计反馈控制律(4),使得系统(5)在H∞性能指标r下鲁棒稳定.
2 鲁棒稳定性分析和控制器设计
定理1 对于给定的r>0,ρ>0和常数ε1i,ε4i,εkij,k=2,3;i,j∈I.如果存在着矩阵P>0,Di,i∈I满足下面矩阵不等式(6),则闭环系统(5)是H∞性能指标r下鲁棒稳定的.


证明 选取如下Lyapunov函数:

其中:P>0是待求的正定对称矩阵.
首先,考虑w(t)≡0时系统(5)的渐近稳定性.
在w(t)≡0时,系统(5)可改写为
沿着系统(9)的轨线,对V(t)求导,可得到
由引理1可知
把式(11)带入式(10),可得
由定理1中式(6)可知:˙V(t)<0,所以可知系统(5)是渐近稳定的.
以下考虑零初始条件ω(t)≠0时的系统(5)的鲁棒H∞性能.沿着系统(5)的轨迹对V(t)求导,可得到

考虑
由引理2可知
式(15)和式(13)相结合,可以得到
由定理1中式(6)可知

对式(17)积分可得到
对式(18)取极限,令t→∞则可以得到:‖z‖2<r‖w‖2.从而闭环系统(5)在H∞性能指标r下是鲁棒稳定的.
3 算例分析
为了进一步阐述前面的方法和结论,考虑如下双线性模糊系统:
其中:

则正定阵及模糊增益矩阵分别为
分别选取初始值为[-0.8 -1.5] ,[-1.1 1.2] ,w(t)=e-0.2t(sint),利用MATLAB仿真,图1是系统变量x1和x2的状态响应,图2是控制律变化过程.由仿真结果可以看出,系统状态变量在22s后趋于平衡点.
[1] Li T H S,Tsai S H.T–S fuzzy bilinear model and fuzzy controller design for a class of nonlinear systems[J] .IEEE Trans.Fuzzy Syst.,2007,3(15):494-506.
[2] Yang J,Jiao H N.Optimization and simulation of a fuzzy controller based on stochastic bilinear systems[J] .2010International Conference on Electrical and Control Engineering,2010:1434-1438.
[3] Chiou J S,Kung F C,Li T S.Robust stabilization of a class of singularly perturbed discrete bilinear systems[J].IEEE Trans.Autom.Control,2000,45(6):1187-1190.
[4] Elliott D L.Bilinear systems in encyclopedia of electrical engineering[M].New York:Wiley,1999.

图1 系统分别在初始状态:[-1 1.6] (实线)、[-2-1.6] (长划线)下的状态响应曲线

图2 系统分别在初始状态:[-1 1.6] (实线)、[-2-1.6] (长划线)下的控制曲线
[5] Zhou S S,Lam J.Control design for fuzzy systems based on relaxed nonquadratic stability and H-infinity performance conditions[J] .IEEE Trans.Fuzzy Syst.,2007,15(2):188-198.
[6] Tanaka K,Sugeno M.Stability analysis and design of fuzzy control system[J] .Fuzzy Sets and Systems,1992,45(2):135-156.
[7] Kim E,Lee H.New approach to relaxed quadratic stability condition of fuzzy control systems[J] .IEEE Ttans.Fuzzy Syst,2000,8(5):523-533.
[8] Wu H N,Li H X.New approach to deladependent stability analysis and stabilization for continuous-times fuzzy systems with time-1varying delay[J] .IEEE Trans.Fuzzy Systems,2007,15(3):482-493.
[9] Chen B,Liu X P.Fuzzy guaranteed cost control for nonlinear systems with time-varying delay[J] .IEEE Trans.Fuzzy Syst,2005,13(2):238-249.
[10] Tanaka T,Ikeda T,Wang H O.Robust stabilizationof a class of uncertain nonlinear systems via fuzzy control:quadratic stability H-infinity control theory,and linear matrix inequalities[J] .IEEE Trans.Fuzzy Syst.,1996,4(1):1-13.
[11] Li T H S,Tsai S H.T-S fuzzy bilinear model and fuzzy controller design for a class of nonlinear systems[J] .IEEE Trans.Fuzzy Systems.2007,3(15):494-505.
[12] Tsai S H,Li T H S.Robust fuzzy control of a class fuzzy bilinear systems with time-delay[J] .Chaos,Solitons and Fractals,2009,1(19):796-801.
[13] Wang C W,Wang W Y,Chan M L.Design of sliding mode controllers for bilinear systems with time varying uncertainties[J] .IEEE Trans.Syst.,Man Cybern,2004,3(4):639-645.
猜你喜欢
数学物理学报(2022年4期)2022-08-22 04:06:44
石油沥青(2021年1期)2021-04-13 01:31:08
数学物理学报(2020年3期)2020-07-27 01:19:56
自动化学报(2019年6期)2019-07-23 01:18:18
自动化学报(2017年4期)2017-06-15 20:28:54
数学物理学报(2016年5期)2016-08-24 07:38:40
制冷技术(2016年4期)2016-08-21 12:40:30
测绘科学与工程(2016年4期)2016-04-17 06:51:14
数学物理学报(2016年6期)2016-04-16 04:40:58
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:42