
采用弹簧和行星齿轮传动的阶梯攀登机器人的开发
2011-07-06 03:25IHAN,介眉
传动技术 2011年1期
1 引言
实际移动的机器人必须可以走险要路段,能攀登栅栏和建筑物的楼梯。大多典型的移动机器人的运动机构为轮型,履带型和腿型,轮型运动机构面对像栅栏和楼梯这类障碍时,它的运动将受到限制[1]。对于圆车轮,当障碍的高度高于运动机构的质心和根据最小滑动来选定运动机构时,它前进是十分困难的[2]。实际上,在不同的障碍环境内,长距离阶梯运动,高度和斜度保持最大的障碍,对于小尺寸的机构具有很广的活动范围,为这个原因,已经有很多研究工作用放大车轮尺寸来克服障碍[3,4],用适当的阶梯爬行机构的设计[5,6]或用行星传动的结构[7,8]。
一种爬行型与轮型相比,它是在前进后履带下落覆盖车轮,然而它可以用单一轮驱动,把功率传到所有车轮,因为已经弥补了有关其轮间间隙的弱点,故它攀越障碍的能力最佳。但它一直存在着由于摩擦力不足而造成高滑动的风险,如车轮在阶梯实现履带边缘接触,采用一个马达可发生一大的转矩。而且一般它必须有一个大的车轮,否则它的运动是困难的,除非一车轮采取至少分三步通过一个阶梯[9],但如两履带速度不同,则它可能从障碍或阶梯上落下来[10]。
腿型是一个模仿人或动物的脚步的型式,和轮式相比较在效能方面落后,同时由于其机构复杂和慢的运动速度,它还有控制困难的缺点,然而它多方面极佳地形的适应性和简单的克服障碍能力[5]。另一方面,采用轮和腿的配合,这样一运动机构可比一个简单的腿或轮更容易爬楼梯,它可以比一轮型运动机构爬较高的楼梯[11]。目前研究趋于企图综合利用各机构的强点[12-14]。
本文提出一新型的运动机构,它采用与其他现有运动机构不同的传感器爬楼梯。通过动力学仿真分析,已设计出一个具极佳行驶能力的轮腿步阶爬行机构,并制造出实验模型证实了该设计的有效性。
2 弹簧和行星齿轮
可以说一个轮型机器人用于粗糙路面差于腿型和机器人,因为轮型全部时间都要与路面接触。如果轮型可用于粗糙路面以及平直路面,它应更实际地用于所有类型的地形,因为它的机械结构和控制简单,它具有高的效性。开发敏感步阶爬行器采用两重要的元件:其一是柔性机构(弹簧)而另一是行星齿轮。
2.1 弹簧机构
如图1(a)所示,当一可动两轮机构和墙壁突然碰撞时,它少许反跳弹回并再撞到该墙壁,由前轮和墙壁的摩擦力使攀登力矩发生,但是前轮攀登的牵引力很快下降,因为碰撞分开。在相同时间,后轮不能再向前运动并开始打滑,因此后轮的牵引力也降低。
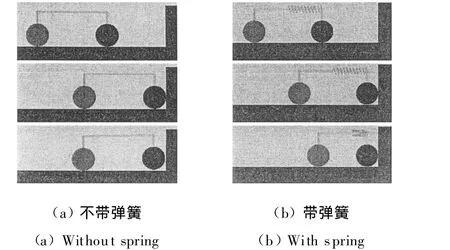
图1 两轮之间弹簧作用Fig.1 The effect of spring between the wheels
如果配合元件如一弹簧安装在两轮之间,如图1(b)所示。后轮可保持滚动到一确定的长度而避免牵引力快速降低,因此,它的前轮开始攀登墙壁的垂直面[11]。图 2示后轮滑动比(=1-ν/rω)的变化[15],弹簧压缩作用下后轮自转。当滑动比接近1.0时,该轮的牵引力减少,但当弹簧常数太高时,它不再爬楼梯,如果根据仿真分析,它具有一合适的弹簧常数,该轮可保持转动,后轮可维持合理的摩擦力。

图2 后轮滑动比的变化Fig.2 The change in slip ratio of the rear wheel
图3示双轮移动机构的步阶爬行在ADAMS仿真中的图解仿真。已经证实当两轮间附加弹簧时改进了其楼梯攀爬能力。它可以克服无弹簧的步阶高约为8厘米,而具有弹簧的移动机构很明显其步阶高于轮的直径(=10厘米),还能发现其不固定或稍低的爬行高度最大为17厘米。
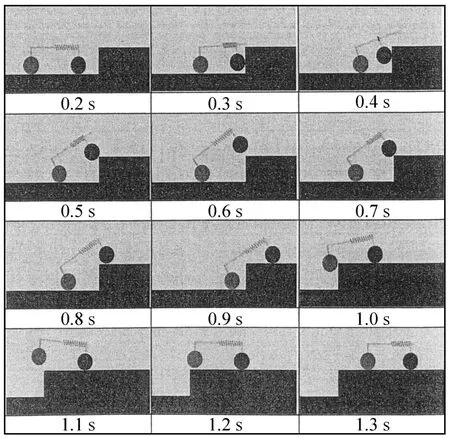
图3 双轮移动机构的楼梯爬行仿真Fig.3 Stair climbing of two-wheel mobile mechanism in simulation
2.2 轮的形状和尺寸
一般,楼梯爬行机构的制造为满足其功能,或者对明显大的障碍如楼梯放大诸轮的尺寸,或附加一附属装置使其和楼梯保持接触。通过该楼梯如标准楼梯,它的轮大,对移动机器人小型化是困难的。
一移动机构仅依从于附加机构弹簧表示阶梯爬行的最大原因,但当有一弹簧的机构攀登高的阶梯时第一轮子有倒翻的危险,后轮在举升的过程中它行驶不稳定和接触墙壁分离。因此,为移动机构保持和楼梯接触,图4示设计了一行星传动轮型机构,用它使各轮和各腿协作,它能比采用一简单的轮或腿攀爬阶梯更简便。行星传动轮型机械模式,因为它结构和控制简单,效率高,成为更实际的能在各种地形行驶的机器人。设计了一个在平地上行驶的12轮机器人,采用驱动轴通过齿轮传递转动功率使其上坡或下坡。同时4个臂各支承三轮,当碰到阶梯或障碍时,由臂转行走通过。
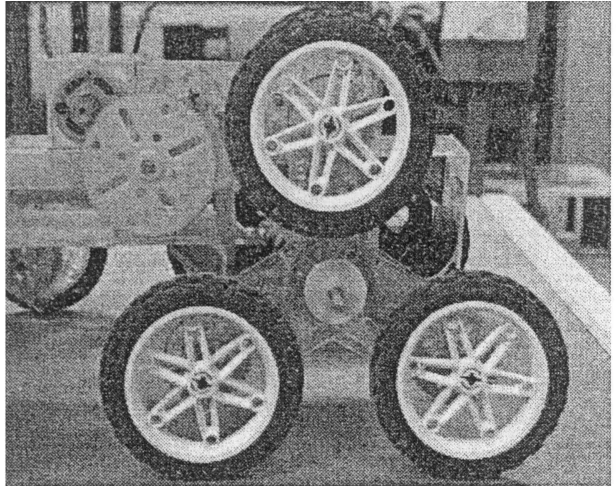
图4 行星轮Fig.4 Planetary wheel
图5示图3只有轮的模型变为带行星轮的仿真结果。考虑步阶高18厘米而不考虑步阶的宽度,该改进机构初始行驶在平面上,再碰到一阶梯的凸缘,该机构由于其附属机构在碰撞后仍保持接触,而后因前臂转动,使轮可安全通过踏步的边缘。以后前轮和阶梯间摩擦,因后轮推力轻易爬上阶梯。当前轮爬上阶梯,弹簧恢复并推前轮和后轮转动,许可和阶梯继续接触,如此安全进行阶梯爬行。

图5 阶梯爬行的行星轮机构Fig.5 Stair climbing of planetary wheel mechanism
本文提出的附属机构和行星轮的组合可使机构小型化,以及与文献[1]比较不采用一个传感器对行驶环境有很大的适应性(图6),它采用传感器在平面行驶,攀登阶梯能和人的行走相同。对于图6移动机构,大于10厘米半径的轮可以通过标准尺寸18厘米的阶梯。另一方面,可开发用轮半径为6厘米通过标准尺寸阶梯的机构模型。

图6 攀登阶梯的另一种行星轮机构Fig.6 Stair climbing of other planetary wheel mechanism
3 机构设计和动力特性分析
如图7所示行星传动轮型爬行机构的基础设计,已基于Dalvand[1]提出的分析方法和已用Pro-e模型一三维设计程序和采用ADAMS软件进行仿真分析,以及进行机构的动特性分析。
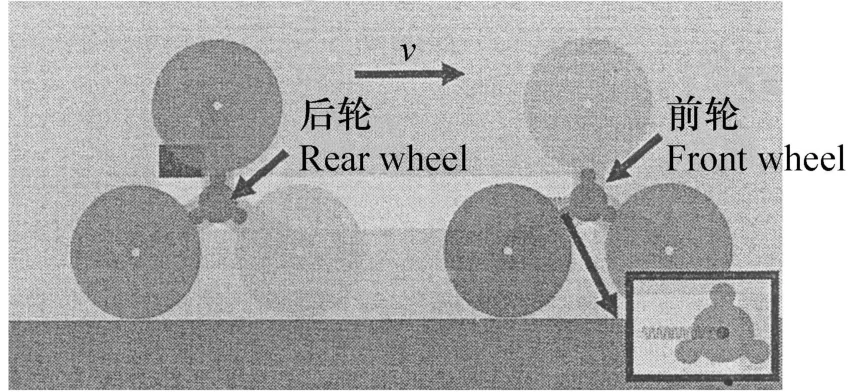
图7 开发爬行机构的基础设计Fig.7 Basic design of developed climbing mechanism
3.1 机构的设计
有很多不同的变量确定阶梯爬行模型的性能,但其中马达转距是一个重要的变量,它不仅可确定模型的性能,还能选择马达用于实际的模型。因此,马达的转矩必须改变以仿真来检验模型性能的变化,按照变化的值并找到合适的数值。
表1列出54次仿真的总结果,当攀爬楼梯的阶梯时,检验机构的动特性。采用O,M和X表示结果的评估;O表示稳定爬行;M表示前轮和后轮与楼梯脱离接触的不稳定爬行;X表示不可能攀爬楼梯的最恶劣情况。根据这些结果,发现后轮转矩较小,楼梯的实际攀爬能力减弱。故由后轮提供的推力对楼梯的攀爬是重要的。另一方面,发现如果前轮转矩较小,它将成为大的不稳定性。基于仿真结果分析模型的最佳转矩范围是:前轮为36-40 Nm,后轮为42-48 Nm,可能攀爬阶梯。
仿真确定在转矩范围内用不同的弹簧常数检查前轮攀爬楼梯的时间如表2所示,当弹簧常数为150 N/m时,时间最短。如表3所示,采用的弹簧常数阶梯爬行或多或少不稳定,但攀爬的阶梯最高。阶梯爬行所需时间不同的主要原因似乎由于弹簧的恢复时间的差异造成的。基于以上仿真所示,具有最短时间和可攀爬楼梯阶梯最高的弹簧常数可确定为最佳值。

表1 满足阶梯爬行的转矩值Table 1 Torque values for satisfactory stair climbing
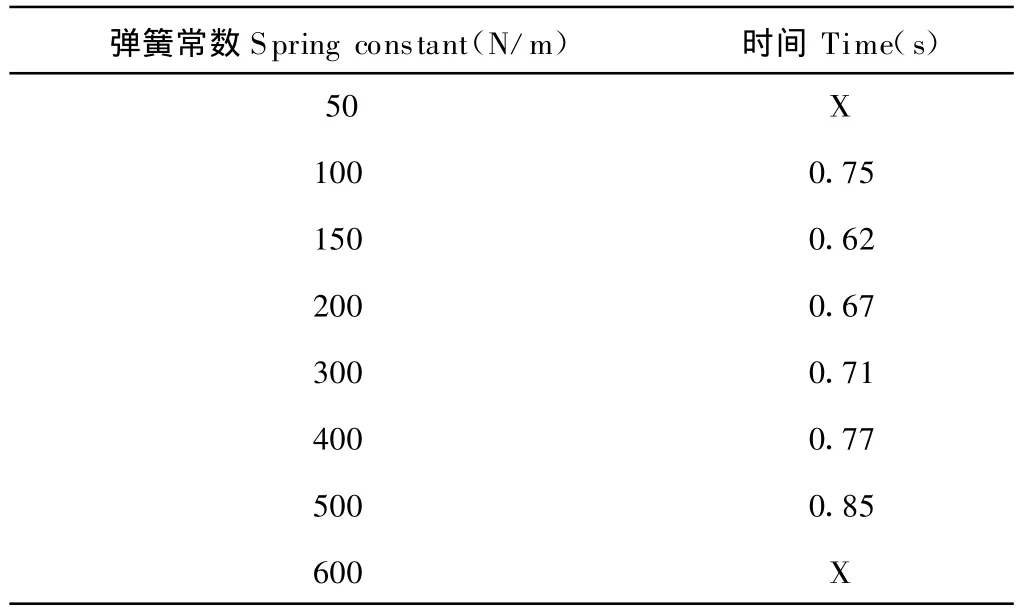
表2 具有各种弹簧的阶梯爬行时间Table 2 Stair climbing time for springs

表3 具有各种弹簧的可能爬行阶梯高度Table 3 Possible stair heights for springs
3.2 动态仿真分析
图8(a)和(b)示具有弹簧附件和简单的行星传动轮型模型爬行高10厘米阶梯楼梯时的结果比较。表4列采用于仿真和前轮和后轮要求的各转矩的参数小型化,采用前节要求的最佳转矩。有弹簧的模型以稳定状况攀爬楼梯,而无弹簧的模型则爬行楼梯后前轮臂转动不稳定。图9示攀爬楼梯时有弹簧和无弹簧模型功率消耗。比较前轮和后轮要求的功率消耗,虽然差异不大,但有弹簧的模型消耗较低。而前轮的能量消耗大于后轮。

图8 阶梯高为10厘米的仿真结果Fig.8 Simulation results for step height of 10 cm
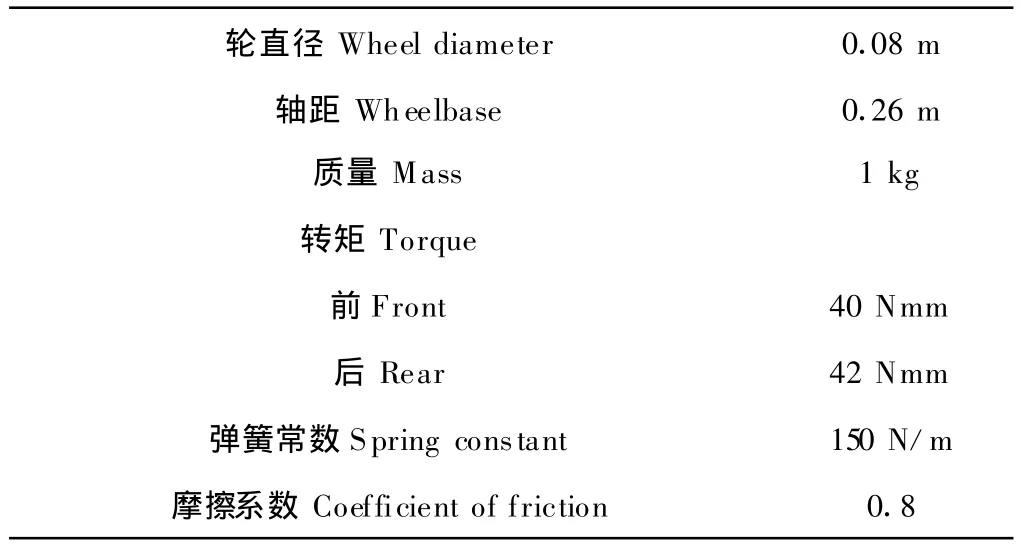
表4 仿真参数Table 4 Simulation parameters
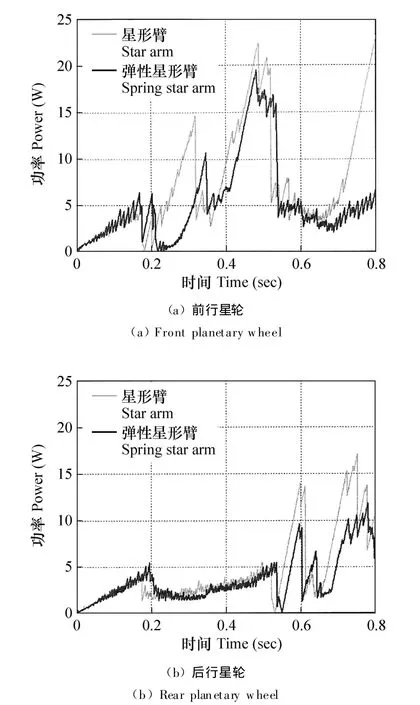
图9 爬行阶梯高为10厘米的楼梯的功率消耗Fig.9 Power consumption for step height of 10 cm
另一方面,图10示爬行阶梯高15厘米的阶梯的仿真结果。该有弹簧的模型以稳定状态攀爬阶梯,但无弹簧模型在爬行阶梯脱离接触,而在爬到末端反方向转动,它在很不稳定的状态。这种状况出现的原因是它与有弹簧模型的不同方面是爬升到阶梯的边缘后反作用力突然降低,因前轮和阶梯间反作用力是由后轮推力保持的。
4 楼梯爬行试验
已开发的有弹簧和行星传动轮型阶梯爬行机构如图11(a)所示。设计的机构使其轮和腿协调一致保持它和楼梯接触,为了攀爬楼梯比仅仅只采用腿或轮更加容易。设计的移动机构通过各马达工作后由齿轮使轴转动驱动前轮和后轮。同时图11(b)是一真实尺寸的三维模型,为辅助开发模型的仿真试验采用Pro-e。
图10 爬行阶梯高15厘米的仿真结果Fig.10 Simulation results for step height of 15 cm

图11 开发的机构Fig.11 Developed mechanism
无障碍平面上行驶时用8轮和地面接触的移动机构如图11所示。此外当表面具有阶梯或障碍时,其附属机构就在阶梯的起始部分起作用,如图12所示。后轮因在其弹簧的作用下移动,而避免在摩擦力作用下降速,它可保持推力垂直于楼梯凸缘,前轮开始攀爬。而如图13所示,用前轮的诸轮转动,由4轮与阶梯凸缘接触,实行滚动,行走和跳跃的功能后,它通过了阶梯和障碍。

图12 附属机构的作用Fig.12 The effect of the compliant mechanism

图13 行星轮的转动Fig.13 Rotation of the planetary wheel
当攀爬的阶梯凸缘高于轮的直径时,如图14所示,移动机构接近阶梯,然后它的一些轮子碰到阶梯的起始点,而如前轮诸轮转动,所有4轮开始接触阶梯。而后用后轮的推力,前轮由于前轮和阶梯间摩擦力而攀爬阶梯。同时后轮转动使所有8个后轮保持和阶梯接触并避免由地面分离。因而,机构稳定的通过(向上和向下)障碍台阶。这样方法开发的机构可用各轮柔性转动和保持与地面接触很容易攀爬阶梯或障碍。
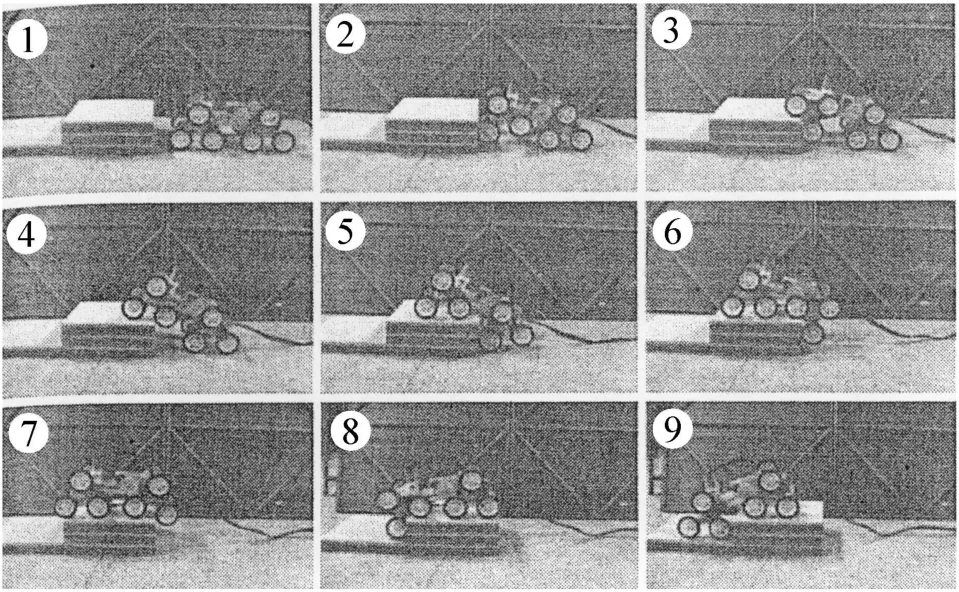
图14 开发机构的步阶爬行(高 12厘米)Fig.14 Step climbing of the developed mechanism(height:12 cm)
当攀爬的阶梯凸缘高度低于轮的直径时,该移动机构接近阶梯如图15所示,在阶梯起始点,其前轮碰到阶梯,如前轮各轮转动,贴近的轮子与阶梯立刻接触。在阶梯宽的支撑面上,该机构很容易靠4个后轮的推力和4个前轮的拉力爬上阶梯。即使阶梯有连续的台阶(图15所示),该移动机构可以像人步行一样稳定的攀爬,这就是一个行星轮型机构的特点。

图15 开发机构攀爬标准阶梯Fig.15 Standard stair climbing of the developed mechanism
5 结论
本研究开发了一新的阶梯爬行机构,有很好地阶梯爬行能力和低的能量消耗,所开发的模型是一个具有弹簧和行星轮机构。采用ADAMS软件完成了仿真分析,采用弹簧作为一个可保持垂直阶梯凸缘推力的装置,表明前轮开始爬升。同时开发具有行星轮结构的机构,用轮的柔性转动和地面保持接触可很容易在各种地形上爬行。基于大量仿真分析结果构成的模型已经进行了详细的设计和试验,同时通过爬行阶梯的实践证实所建立的试验模型是正确的。在实验中,开发的机构不仅在平地而且通过阶梯和障碍都能稳定高效行驶。
感谢
作者在休假年(2007—2008)离开Hongik大学时准备了本文,而本研究是由2006 Korea Sanhak提供了部分赞助,最后作者感谢Hongik大学的大学生B.Kim和H.Yang他们在准备本文中的支持和帮助。(介眉译自Proc.IMechE 2008 Vol222 Partc:J.Mechanical Engineering Science)
[1]Dalvand,M.M.and Moghadam,M.M.Stair climber smart mobile robot(MSRox).Auton.Robots,2006,20(1),3-14.
[2]Lamon,P.,Krebs,A.,Lauria,M.,Siegwart,R.,and Shooter,S.Wheel torque control for a rough terrain rover.In Proceedings of the IEEE International Confer-ence on Robotics and Automation,New Orleans,LA,2004,pp.4682-4687.
[3]Agrawal,S.K.and Yan,J.A three-wheel vehicle with expanding wheels:differential flatness,trajectory planning and control.In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems,Las Vegas,NV,2003,pp.1450-1455.
[4]Yah,J.and Agrawal,S.K.Rimless wheel with radially expanding spokes:dynamics,impact,and stable gait.In Proceedings of the IEEE International Conference on Robotics and Automation,New Orleans,LA,2004,pp.3240-3244.
[5]Low,K.H.,Loh,W.K.,Wang,H.,and Angeles,J.Motion study of an omni-directional rover for step climbing.In Proceedings of the IEEE International Conference on Robotics and Automation,Barcelona,Spain,2005,pp.1585-1590.
[6]Chugo,D.,Kawabata,K.,Kaetsu,H.,Asama,H.,and Mishima,T.Development of a control system for an omni-directional vehicle with step-climbing ability.Adv.Robot.Int.J.Robot.Soc.Japan,2005,19(1),55-72.
[7]Kim,Y.H.,Jang,J.,Lee,C.H.,Woo,C.K.,Kim,M.S.,and Kwak,Y.K.Stair climbing analysis of wheeled mobile robot.In Proceedings of the Korea Society of Automotive Engineers Autumn Conference,Daegu,Korea,2000,pp.778-783.
[8]Hong,Y.H.,Kim,D.H.,and Yim,C.H.Design of autonomous stair robot system.J.Control Autom.Syst.Eng.,2003,9(1),73-81.
[9]Mo,H.,Huang,P.,and Wu,S.Study on dynamic stability of a tracked robot climbing over an obstacle or descending stairs.In Proceedings of the IEEE International Workshop on Electronic Design,Test and Applications,Kuala Lumpur,Malaysia,2006,pp.210-213.
[10]Eiji,N.and Yoji,S.Mechanism and control of a wheeled mobile robot for rough terrain.In 24th International Symposium on Industrial Robots,Tokyo,Japan,1993,pp.437-444.
[11]Velimirovic,A.,Velimirovic,M.,Hugel,V.,Iles,A.,and Blazevic,P.A new architecture of robot with‘wheels-with-legs'(WWL).In International Workshop on Advanced Motion Control,Coimbra,Portugal,1998,pp.434-439.
[12]Huang,B.,Sun,L.,and Luo,Y.Statically balanced stair climbing gait research for a hybrid quadruped robot.In Proceedings of the IEEE International Conference on Mechatronics and Automation,Ontario,Canada,2005,pp.2067-2071.
[13]Takahashi,M.,Yoneda,K.,and Hirose,S.Rough terrain locomotion of a leg-wheel hybrid quadruped robot.In Proceedings of the IEEE International Conference on Robotics and Automation,Orlando,FL,2006,pp.1090-1095.
猜你喜欢
汽车维护与修理(2022年5期)2022-09-06
小学生学习指导·爆笑校园(2019年6期)2019-09-10
人大建设(2017年12期)2017-08-15
幸福(2016年9期)2016-12-01
学苑创造·B版(2016年4期)2016-04-14
红蜻蜓·低年级(2015年11期)2016-02-02
汽车文摘(2015年3期)2015-12-11
中国自行车·骑行风尚(2014年4期)2014-10-10
