
机械混合驱动车辆:飞轮载体车用回收能量吸收装置的研究
2011-07-06 03:25U.Diego-Ayala,P.Martinez-Gonzalez,N.Ncglashan等
传动技术 2011年1期
1 引言
混合电驱动车辆(HEVS)已成为常见的可使行驶平顺性良好的车辆,具有普通的变速箱车辆特性(今后称之谓普通车辆),在都市环境内行驶时,它具有两个有吸引力的特点:显著降低了燃油消耗和低排放。这些车辆的典型的动力系组成是:一台内燃机提供基本的驱动功率,而电池和电马达提供辅助加速度,低速驱动和制动能量回收[1],它的改进性能是由于许多因素,但关键性的是其动力系能和辅助动力源(电池和相连马达—发电机)联合工作。这种辅助动力源许可发动机更高效工作并防止恶劣的瞬态动力要求。同时该发动机还可关闭并立即再起动。此外,还能储存部分回收的能量[2-4]。
HEVS给出的性能表明,制造商提出用它们去代替普通的车辆,但是相对于节约的燃油消耗它们的高成本而削弱了它们的商业可行性。和普通车辆比较成本的差异,一定程度特别是由增加的动力系部件给出的,这些是电池和辅助动力变换器,它们是HEVS的所谓典型的辅助能量储存器。尽管研究者们和制造商们的最大努力,与车辆配合应用的现代化电池的成本一直很高[5-7]。除它们的价格高外,电池还存在的缺点有:如低的功率对重量比、低的能量密度、对温度控制要求高和对车辆使用寿命的不确定性等[8,9]。为了要实现HEVS所要求的电池,提出了是否可能采用另一个辅助能量储存的型式,应用高速飞轮就回答了这个问题。已经有很多研究者[10-13]推荐了在混合驱动车辆中采用飞轮,其中典型的包括采用马达—发电机传递飞轮的功率。但这种装置存在效率缺陷,因为它的能量转换要求由机械能—电能—机械能。一种不同的方法是采用机械变速器给出一机械混合驱动车辆的新概念(见图1)。这种方法的特征可以很容易在一普通车辆动力系中实现。在飞轮载体机械变速器文献中少数研究发现,这些要求实际上修改动力系适应于采用飞轮去扩大发动机的工作。例如瑞士联邦技术研究所制造的混合驱动动力系[14],当要求高功率时采用飞轮来补充发动机的功率输出,但只在短时间内可回收制动能量。类似的Eindhoven大学开发的混合驱动变速器[15-17],飞轮用以提高功率,并防止发动机由低部分负荷效率运行,仅限于企图有限回收制动能量。

图1 机械混合驱动车辆(IC,内燃机)仅制动和CVT制动型简图Fig.1 Schematic diagrams of the brake-only and CVT-brake versions of the mechanical hybrid vehicle(IC,internal combustion)
本文将讨论一机械能储存装置的工作原理,其有效回收能量大部分的收集能力。本文还介绍了该装置的试验论证,以及讨论了该装置在普通车辆中的两种可能的方案,再用计算机模型评估了该混合驱动车辆的有关性能。
2 机械能量储存装置
所设计的机械能量储存装置避免变更一普通的动力系,它的设计保持一个简单的并和一普通的变速器和发动机并联组合。该装置的大多数部件呈机械联接,高速飞轮作为能量储存元件,而一行星齿轮装置(PGS)用来作为动力控制器和变速元件。
图1示两型动力系结合成的机械能量储存装置和PGS将在本节讨论。
1.仅制动系统采用它在一PGS的圈齿轮机械制动以控制功率流。
2.无级变速器(CVT)—制动装置,它是仅制动装置PGS和输入轴之间加—CVT,从而扩大了能量储存装置的工作范围。
飞轮基于实际设计由Shah[18]开发的,它是一个0.11 kg m2的多层斜向碳纤维缠绕成的现代化飞轮。该飞轮藉助于非接触式磁流环密封在真空状况下工作。它已经在真空下转速超过22000 r/m成功运转试验。
飞轮的角速度与车辆速度无关,它可以由零变到每分钟几万转。这就要求飞轮与车辆终传动能高速和无级变速联接,它可以由用一个两级PGS来完成。这种装置的运行工作将在节2.1中表述。飞轮的高速是该置的最重要特性之一。例如,由Eindhoven大学推荐的动力系中,因为直接受发动机影响使飞轮在低速工作。反之,这里所推荐直接在终传动运转,飞轮高速转动与车辆采用初始推进元件无关。
如图1所示,第一级行星轮与驱动车轮的输入轴相联接(后面指为行星架),第二级的太阳轮与飞轮相联接(后面指为太阳轮),而两级共同的圈齿轮或与摩擦的制动器或与制动器和CVT装置相联接,这些部件与齿圈联接将对通过装置功率流加以控制。
两混合驱动动力系有相同的工作模式,如下述:
1.回收制动。在此模式中,飞轮回收车辆减速的运动能量。
2.飞轮辅助加速。在此模式中,采用由飞轮消除能量来加速车辆。
3.空档。在此模式中,装置的各个部件自由转动,飞轮和车辆间不发生任何能量转换。
因为能量储存装置与普通动力系并联安装,故混合驱动车辆保留了普通车辆的全部能力,要实现这种工作模式,混合驱动动力系只要简单地在空档模式运转。
2.1 行星齿轮传动的工作原理
混合驱动动力系的心脏是PGS,它控制了飞轮和车辆间的能量流。采用普通型的变速器,要求它能在紧凑空间具有高的减速比[19]。采用PGS代替单一的CVT,较采用CVT的无级变速比,它提供了更大的速比范围和效率[20]。
因为行星齿轮传动是一个具有两自由度的装置,故可获得变形,为实施PGS的分支相对的速度平衡,其控制方程由[21]给定为:

式中ωC,ωR和ωS分别表示为行星架、齿圈和太阳轮的速度,而A和B为描述PGS两分支运动学的常数,两级PGS式(1)内A和B常数为
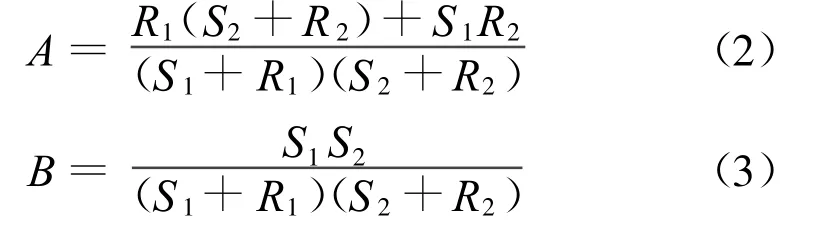
式中S和R分别为太阳轮和齿圈的齿数,脚注1和2分别表示为PGS的第一级和第2级。
式(1)表明对于太阳轮(飞轮)和行星架(车辆)速度的任意组合,齿圈以精确的均衡速度回转。如果齿圈速度被更改变,则能量传递发生,并且太阳轮和行星架的速度将按照齿轮箱内均衡速度变化。该运动关系可以用诺模(nomo)图绘出,图中行星架速度为值x=0的线,齿圈的速度值x=-B的线,而太阳轮速度为值x=A的线。按照这样的图示,对任意给定两分支的速度,可以由观察确定第三分支的速度。
由实例,图2表明回收制动时-PGSA=0.9的均衡速度,可以看到齿圈和行星架(车辆)为减速,而太阳轮(飞轮)为加速度,保持为线性的运动关系,如式(1)所示。该关系对两种混合驱动动力系都是有效的。
通过该装置的能量流可以由研究的齿轮箱内的转矩平衡来表明,可由其分支之一的转矩算出PGS内的作用转矩。给定一在行星架内已知转矩TC,则齿圈内转矩TR,太阳轮内转矩 TS为[21]
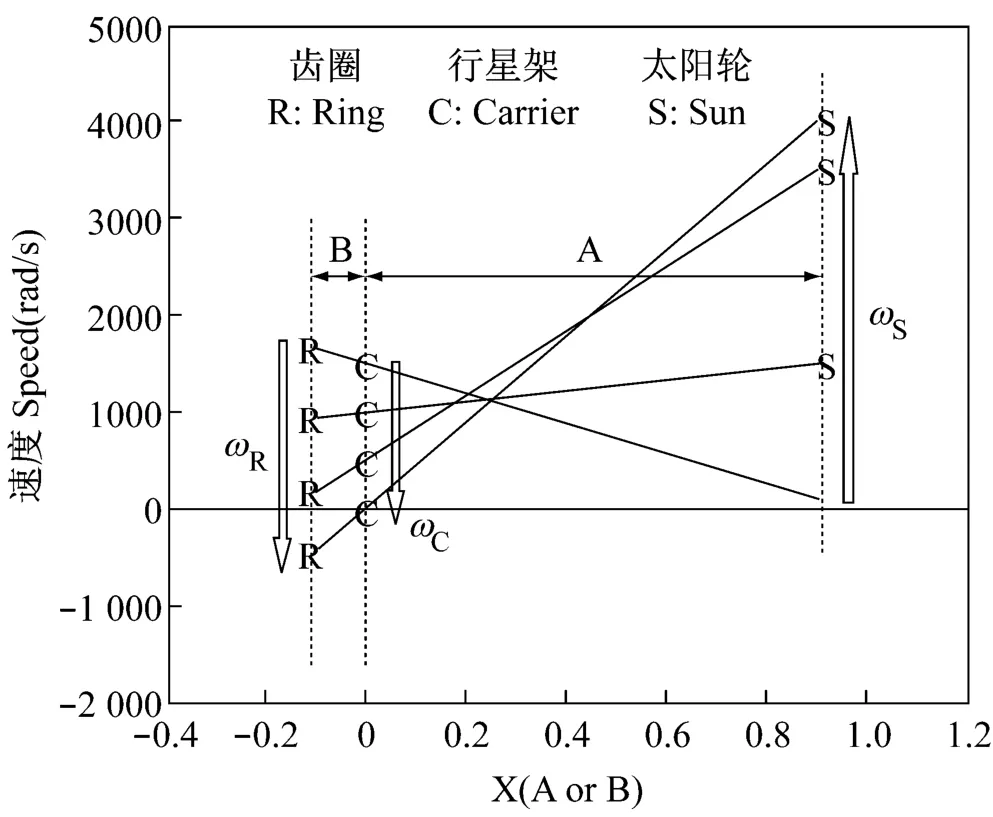
图2 在PGS分支中回收制动时均衡速度的直观实例Fig.2 Visual example of equilibrium speeds in the PGS branches during regenerative braking

式(4)和式(5)指出,对于给定的行星架转矩,则将有一个相反的成正比例的齿圈和太阳轮转矩。实际部件之间的能量流将由各分支的转矩和转速的方向确定。本文通常指定有两者速度和转矩方向相同的能量进入PGS;相反,若方向相反则能量离开PGS。因此,可以用加于装置齿圈内的转矩来控制功率流。这点可以用检查详细的混合驱动装置运转模式来表明。
当回收制动模式如图3所示,所有PGS的分支都以相同方向转动,在该状况,作用于齿圈上的转矩与速度方向相反,故减速。给定转矩和速度以及行星架传到太阳轮和齿圈上能量流的组合,因此,车辆的动能部分传递到飞轮,检察图2可以显见,飞轮承受了能量,在车辆(行星架)停止之前,齿圈到了静止位置。此后不再发生回收制动,而对于车辆的最终制动则采用常规的制动。

图3 回收制动模式Fig.3 Regenerative braking mode
飞轮一次已储存足够的能量用于加速车辆,它将通过PGS传递功率并用以使车辆加速(图4)。随着在车辆初始静止位置,而飞轮高速旋转,齿圈的临界速度在负方向(如图2中粗黑线所示)。该飞轮辅助加速模式用齿圈中使其减速的转矩再起动。用转矩和速度的组合(如图4所示),能量由太阳轮传到行星架,造成用飞轮的能量来加速车辆。
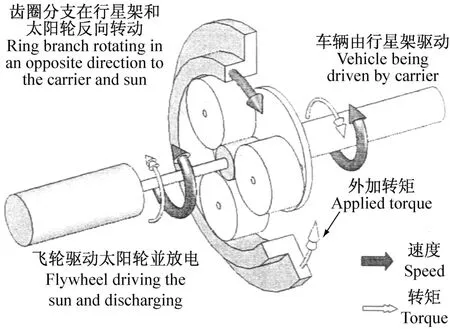
图4 飞轮辅助加速模式Fig.4 Flywheel-assisted acceleration mode
在空档模式中,齿圈没有转矩作用,因此它以给定的飞轮和车辆所要求的任意均衡速度回转。在这种模式中,任何分支间没有能量传递。
采用相同的原则研究两装置控制能量流,但用于PGS齿圈分支的控制转矩是不同的。
2.2 纯制动动力系型式方程式
纯制动装置是在PGS的齿圈采用一摩擦制动器,如图1所示,采用必要转矩控制装置中的能量流。因此仅可使齿圈减速,这意谓着回收制动模式时它必须正向转动(如图2所示),而在飞轮辅助加速模式它负向转动。该制动器除耐久性外对能量浪费无特殊要求。
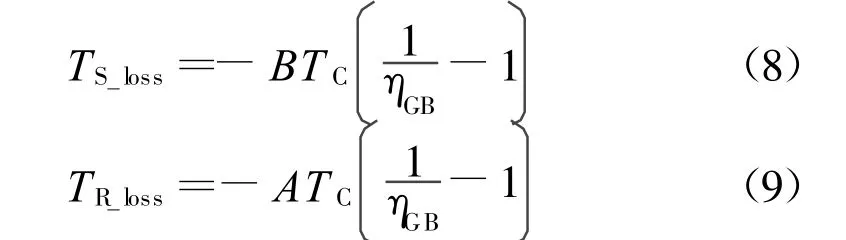
描述PGS特性方程(1)至(5),但没有包含在齿轮箱必需考虑的效率ηGB。以上计算太阳轮的转矩损失TS_loss和齿圈的转矩损失TR_loss与能量流的方向有关。当回收制动(TC>0)时

当飞轮辅助加速时(TC<0)
给定变速箱所包括的这些转矩平衡应符合:

因此,用以下所提出的机械效率计算太阳轮和齿圈的转矩,当回收制动(TC>0)

当飞轮辅助加速(TC<0)时

基于回转运动方程,已知飞轮轴的转矩Tfw_shaft在该情况飞轮的速度

式中 Δωfw,Ifw和 Ifw_loss分别是速度变量、惯量和飞轮的转矩损失。
对于该方程式,Tfw_shaft等于 TS,但为匹配转矩平衡应用相反符号。
2.3 CVT制动动力系型式方程式
带CVT制动动力系型式由和只带制动器型式的相同部件组成,但具有附加的CVT装置。该附加的机械部件,许可齿圈已由制动器制动以后,能量仍可经过CVT分支传送。从而装置的利用范围扩大,可降低齿圈制动的损失。因此,当CVT不工作时,应用2.2节的公式,当CVT工作时,则应用本节所示公式。图5示该装置描述采用的有关术语和名称。在该情况,主输入轴上的转矩 Tshaft分流为行星架上转矩TC和CVT分支上转矩TC_CVT。太阳轮上转矩TS和齿圈上转矩 TR由PGS的速比确定。行星架角速度 ωC、齿圈角速度 ωR和太阳轮角速度ωS与转矩一起确定CVT和齿轮箱的功率流。
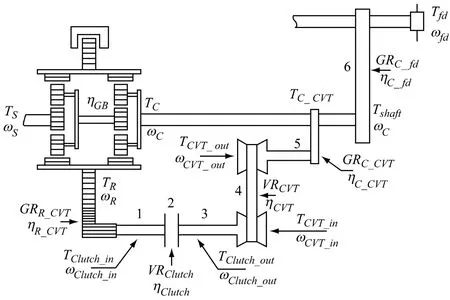
图5 机械混合驱动动力系CVT制动型式名称术语,表示转矩 T、角速度ω、齿数比GR、速比VR和部件效率η,其有关脚注依据于参阅有关的机械部件,图中数字相关位置列于表1Fig.5 Nomenclature for the CVT-brake version of the mechanical hybrid powertrain,showing torque T,speed ω,gear ratio GR,velocity ratio VR,and efficiency ηat the components which are correlated with a subcript that depends on the mechanical component to which it refers.The numbers in the figure are correlated with the located in Table 1.
忽略动力系损失,PGS的功率平衡方程式为

分流至CVT的功率为

其中

机械混合驱动动力系的输入和输出总功率均衡由联立方程式(16)、(17)和(18)确认,并应符合

因此,由已知飞轮的初始速度解式(16)和(17),求出通过CVT分支传递的功率。
这些公式必须考虑系统机械部件内存在的损失进行修正。表1列出系统的全部公式组(参见图5)。
参阅列于表1的公式,结合功率通过CVT分支的有关损失,采用

把它和式(17)联立,已知飞轮辅助加速度求出

对于回收制动,还等于

当已知飞轮辅助加速度时,PGS的功率平衡式为

同样回收制动时为

因此,采用不断重复解式(33)至(36),系统获得的不同的解,给出一功率要求或提供在主轴和飞轮的初始速度。
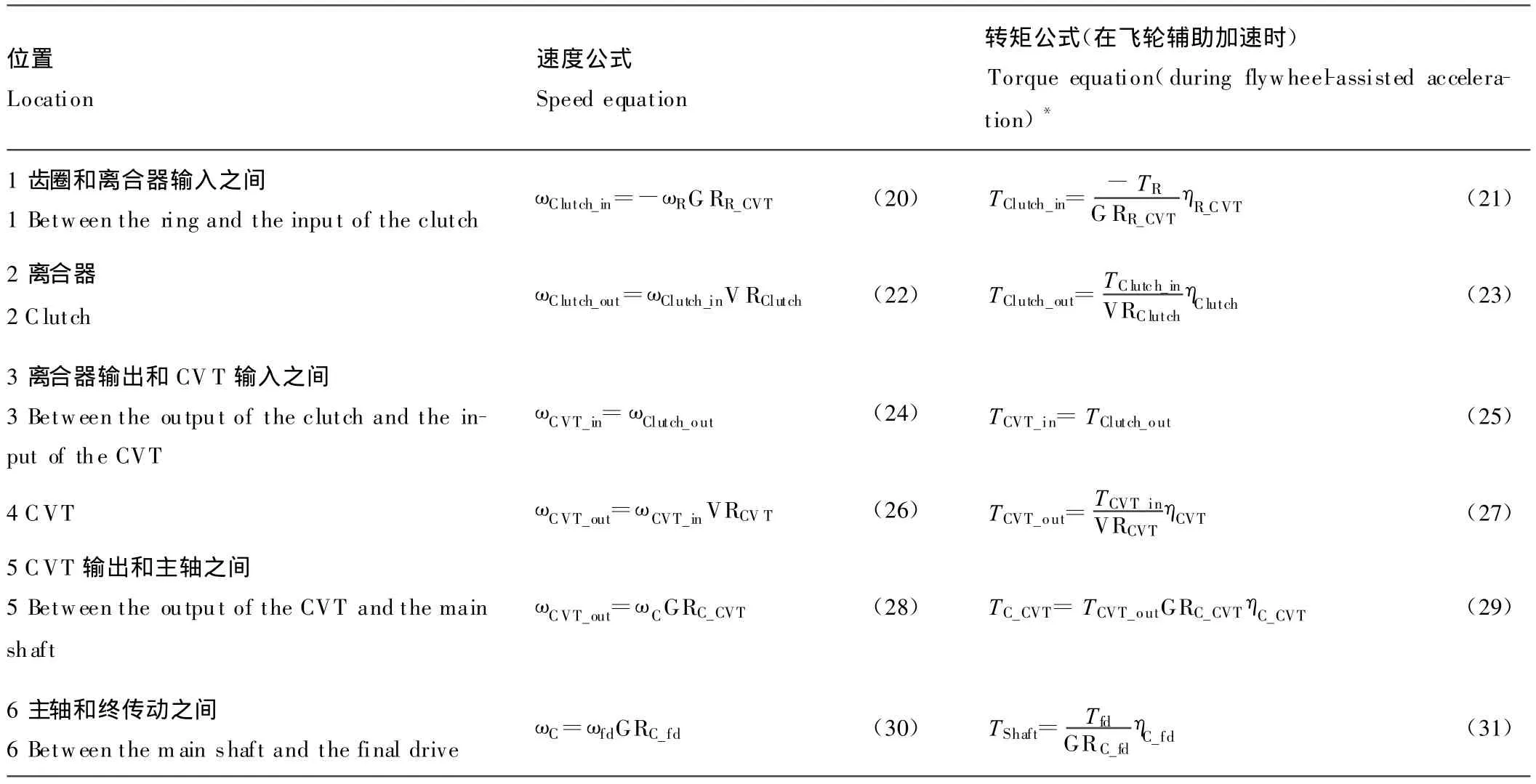
表1 CVT和PGS计算机模型公式Table 1 Equations for the computational model of the CVT and PGS
3 机械能储存装置的实验论证
3.1 物理测定试验台
为证实推荐装置的工作原理,开发了一试验台仿真上述的唯制动式。所选择的构造,装配简单和控制系统简便,从而许可对一简单的装置对飞轮—PGS装置的运动学特性进行试验和研究,采用的试验台和仪表如图6所示。
主要部件如下。
1.一高速飞轮,用直径为218 mm和由20至65 mm不同厚度的低碳钢制造,转动惯量为0.11 kg m2在大气压力下工作,虽然它有明显的空气动力损失,但它适合于提供一能量储存元件的工作原理。
2.测功仪模仿车辆的能量特性,许可由高速飞轮吸收和传送能量,它由一厚度20 mm直径620 mm惯性矩3.4 kg m2的钢盘制造。该盘的周围垂直安装了一些叶片,用来模拟实际车辆的空气阻力。一实际中等尺寸车辆的惯量和损失可大约用一系数等于40来衡量。
3.一个具有由式(2)和(3)确定的运动量A=0.9654和B=0.0346,有一最大转矩25 Nm的双PGS传动。
4.一摩擦制动器使PGS的齿圈减速和控制能量流。
5.一0.25 kW两极三相鼠笼式感应电机与行星架连接加速测功器。该电机模拟机械混合驱动车辆发动机。
对PGS所有分支:齿圈、行星架(同样作为测功器)和太阳轮(同样作为飞轮)作转动速度测量,同时测出行星架分支的转矩。
再分析这些测量值,并与实际开发模拟混合驱动动力系的特性的计算模型比较。该模型采用的方程式示于节2。
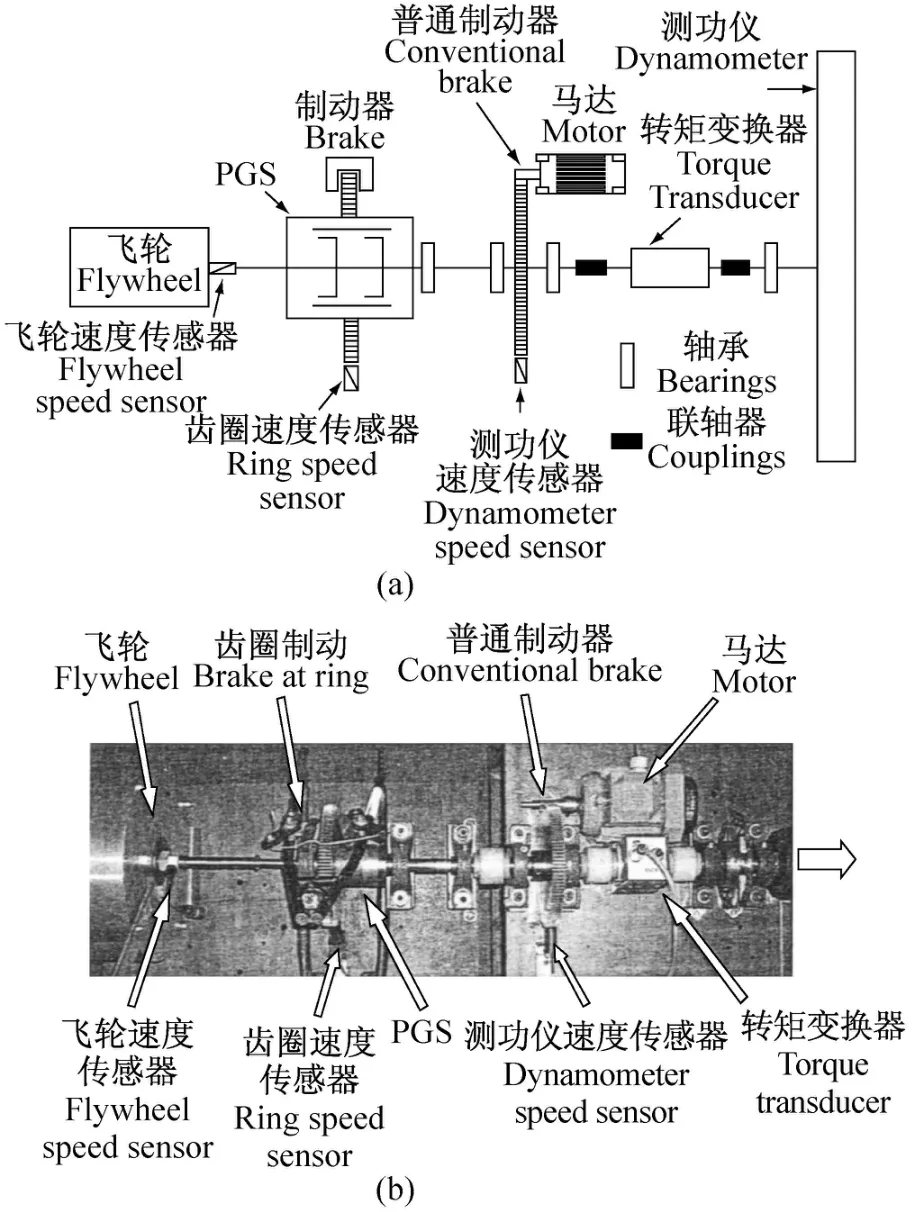
图6 试验台(a)简图(b)照像图Fig.6 (a)Diagram and(b)photograph of the experimental test bed
猜你喜欢
百科探秘·航空航天(2020年6期)2020-07-09
模具制造(2019年7期)2019-09-25
表面工程与再制造(2019年3期)2019-09-18
中学生数理化·八年级物理人教版(2019年5期)2019-06-25
读者(2018年20期)2018-09-27
时代汽车(2018年12期)2018-06-18
制造技术与机床(2017年11期)2017-12-18
中国自行车(2017年11期)2017-04-04
少儿科学周刊·儿童版(2016年1期)2016-03-14
空间控制技术与应用(2015年4期)2015-06-05
