
五自由度关节式机械手运动学分析及仿真
2011-07-03 02:08刘萍,陈莹
制造业自动化 2011年19期
刘 萍,陈 莹
(宿迁学院,宿迁 223800)
0 引言
在过去三四十年间,机器人技术获得了引人注目的发展,其应用范围遍及工业、农业、医疗及航空航天等领域[1~5]。机器人运动学分析是对其进行动力学及控制研究的基础[6],文献[7]利用纯软件的方法研究了五自由度关节型机器手的运动动力学,并进行了三维仿真,由于缺少理论分析而不方便对后续的力学控制进行研究。本文针对这种类型的机器手,利用各关节处相邻两连杆相对关系得到各连杆对基座的位姿描述,即正运动学分析过程,然后,利用两矩阵相等时对应位置元素相等的特点,对该机械手的逆运动学进行了求解。最后,利用VB软件编程实现了该机械手运动学分析的参数化及位姿的主、俯视图的可视化仿真。
1 运动学模型建立
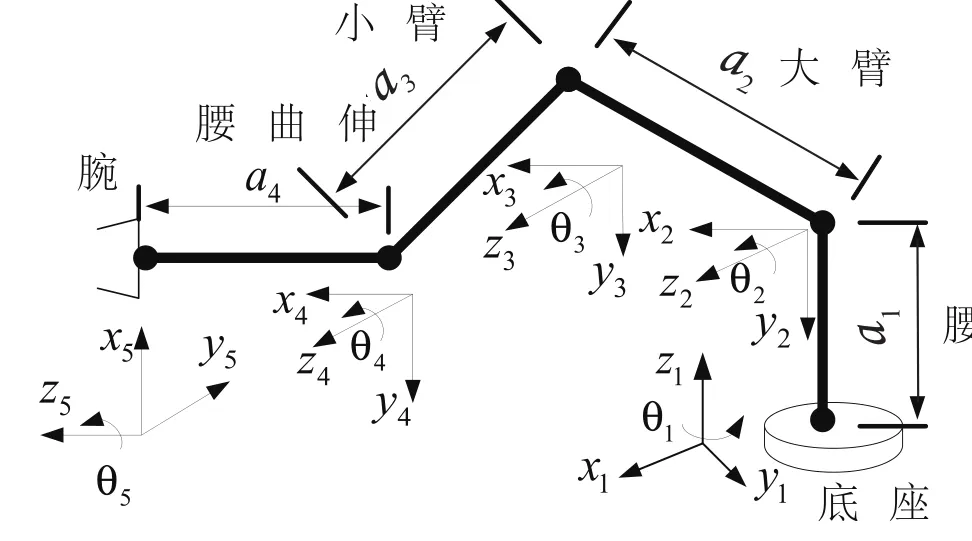
图1 五自由度关节式机械手机构简图
图1为研究的五自由度关节式机械手的机构简图,该机械手包含五个转动关节,主要由底座、腰(连杆1)、大臂(连杆2)、小臂(连杆3)、腰曲伸(连杆4)及腕组成。如图1所示建立各关节坐标系{1}~{5},杆件参数及关节变量见表1(角度取逆时针方向为正),其中θi为连杆i(i=1,5)绕Zi轴旋转的角度或连杆i-1(i=2,3,4)到连杆i绕Zi轴转动的角度,αi-1为连杆i-1的长度,为连杆从zi-1到zi绕xi旋转的角度(满足右手定则时为正),di为相邻连杆的公共法线的距离。
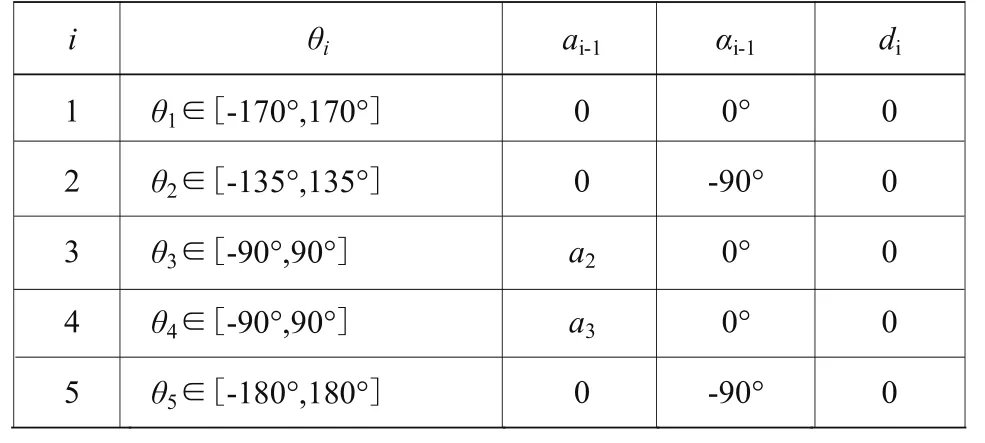
表1 五自由度关节式机械手杆件参数和关节变量
2 运动学分析
2.1 正运动学
正运动学分析过程即求解在确定的机械手尺寸下,不同的关节变量θi输入时机械手末端坐标系对主坐标的位置和姿态。对于转动关节,关节两侧连杆i对连杆i-1的相对位置由矩阵表示为[6]的条件下求取各杆臂的转动角度,即已知nx,ny,nz,ox,oy,oz,ax,ay,az,求θ1,θ2,θ3,θ4,θ5。
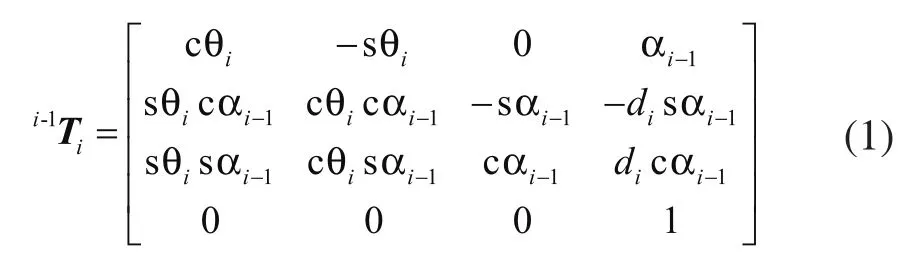
由式(2)知,连杆5对主坐标的关系用连杆间相互关系的传递表示为
其中cθi表示cosθi,sθi表示 sinθi,其他依次类推。
将对应的αi-1,di,θi代入式(1)即可得到相邻连杆间的关系0T1,1T2,2T3,3T4,4T5。则连杆i对主坐标的关系为:

连杆1对主坐标的关系:0T1
连杆2对主坐标的关系:0T2=0T1·1T2
连杆3对主坐标的关系:0T3=0T2·2T3
连杆4对主坐标的关系:0T4=0T3·3T4
连杆5对主坐标的关系:0T5=0T4·4T5
代入上述各式,得到机械手末端装置(腕)对基座的关系为
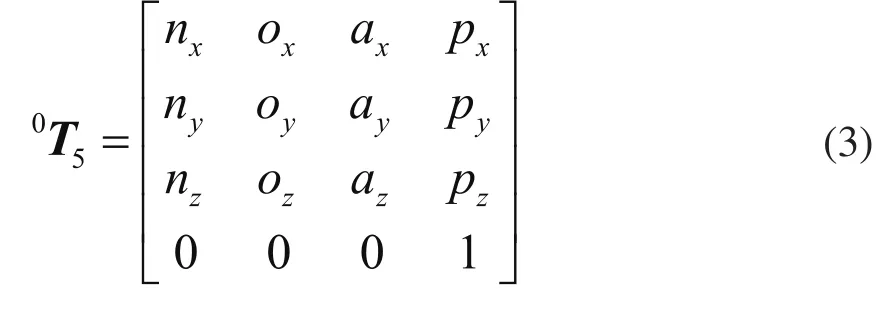
其中,nx,ny,nz表示末端x’分别在x0,y0,z0方向上的投影;ox,oy,oz表示末端y’分别在x0,y0,z0方向上的投影;ax,ay,az表示末端z’分别在x0,y0,z0方向上的投影。
式中,
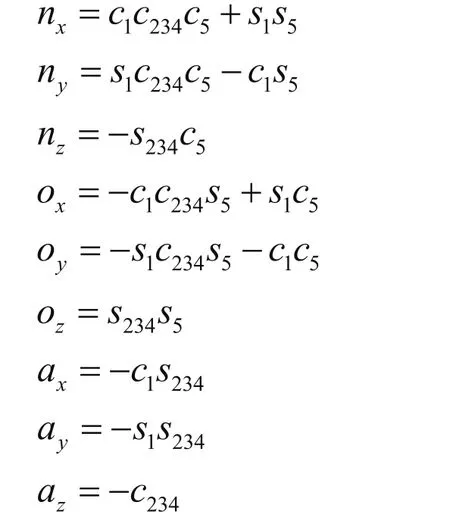
其中c1表示cosθi,c234表示cos(θ2+θ3+θ4),其他依此类推。
2.2 逆运动学分析
逆运动学分析过程即在末端位姿已知

式(2)两端左乘0T1-1,得到

化解之,由式(5)等号两边矩阵的(2,4)位置的元素相等,令则

其中,sgn(x)为符号函数:当x>0时,sgn(x)=1;当x<0时,sgn(x)= 1。

由式(5)等号两边矩阵的(1,4)、(3,4)位置的元素分别相等,通过适当的化解可以得到
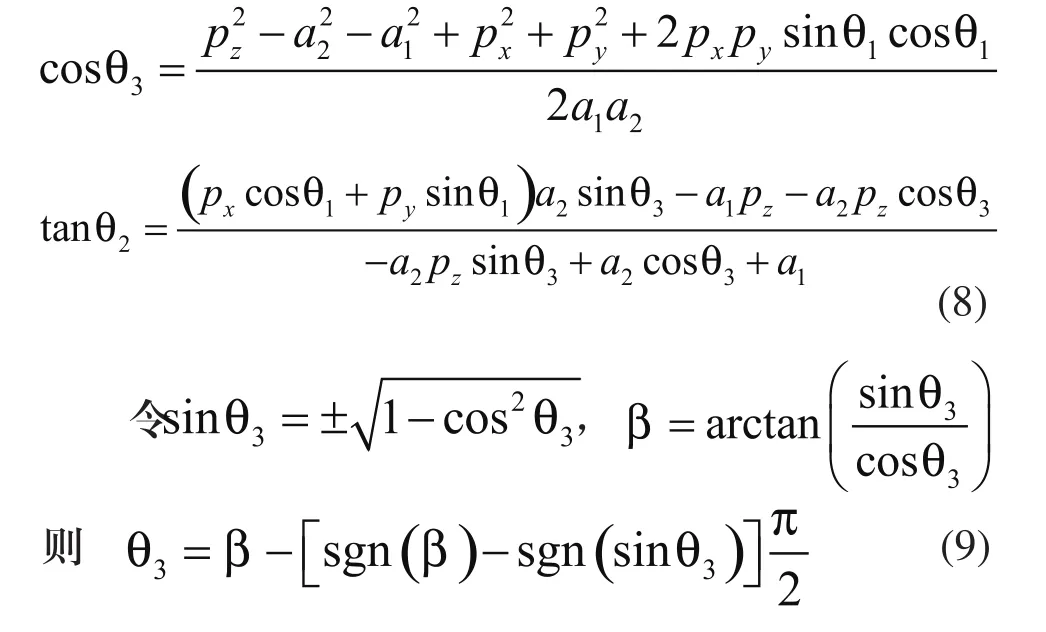
代入式(8)得

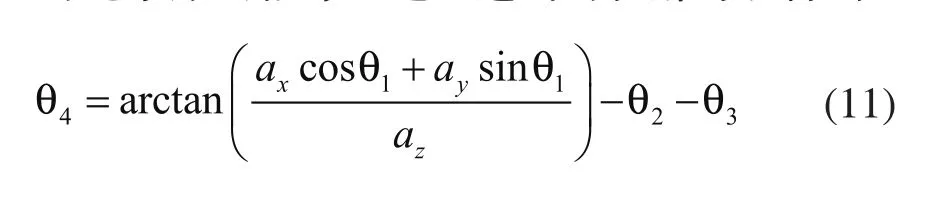
由式(5)等号两边矩阵的(1,3)、(3,3)位置的元素分别相等,通过适当的化解可以得到
3 基于VB的运动仿真
上述理论分析实现了五自由度关节式机械手的正、逆运动学分析,在此基础上,这里利用VB软件建立交互式仿真界面,方便参数化实现机械手运动的求解。
图2为正运动分析参数化过程,图3为逆运动参数化过程,在机械手尺寸参数不变的情况下,将正运动的分析的结果作为逆运动分析的位姿输入,所得到的结果与正运动输入误差很小,几乎相同。
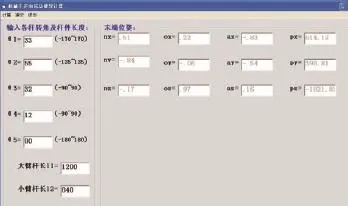
图2 正运动分析参数化
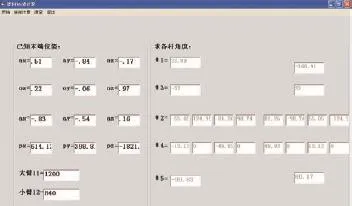
图3 逆运动分析参数化
图4、图5分别为机械手的正运动和逆运动仿真,采取对简化了的机械手用主视图和俯视图表示的方式。由两图比较可以清楚看到,正、逆运动下机械手的位姿完全相同。
4 结论
本文针对已有的利用纯软件对五自由度关节式机械手研究在理论方面的不足,利用关节处相邻两连杆处的相对位置关系,对机械手末端进行了运动学分析,同时利用VB软件编程实现了运动学的参数化求解以及机械手位姿的仿真,研究成果为后续的机械手具体设计及研究提供了一定的基础。
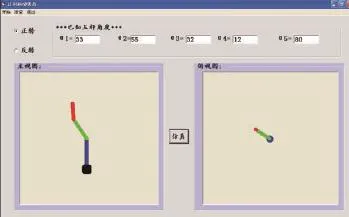
图4 正运动仿真
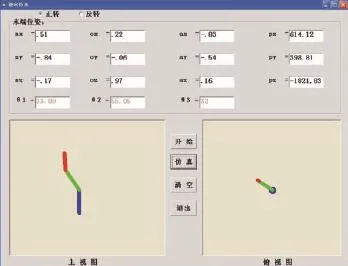
图5 逆运动仿真
[1] 王朋,李俊峰,宣斌.大口径光学元件五自由度抛光机械手的设计[J].光学技术,2010,36(1):116-120.
[2] 卢伟,宋爱国,蔡建荣,等.柑橘采摘机器人结构设计及运动学算法[J].东南大学学报(自然科学版),2011,41(1):95-100.
[3] 车仁炜,吕广明,陆念力.五自由度康复机械手的动力学分析[J].哈尔滨工业大学学报,2005,37(6):744-747.
[4] 彭利平,訾斌.3自由度柔索并联机构的运动轨迹规划[J].机械传动.2010,34(5):13-16.
[5] 李永刚,宋秩民,张策.基于现代微分几何的机器人研究现状[J].中国机械工程,2007,18(2):237-243.
[6] 蔡自兴.机器人学(第二版)[M].北京:清华大学出版社,2009.
[7] 杨雄,孔庆忠,张海平.五自由度关节型机器人结构设计及其动态仿真研究[J].机械设计与制造,2009,(8):169-171.
猜你喜欢
光学精密工程(2022年22期)2022-11-28
装备制造技术(2020年4期)2020-12-25
浙江海洋大学学报(自然科学版)(2020年5期)2020-06-19
河北省科学院学报(2020年1期)2020-05-25
重型机械(2019年3期)2019-08-27
电子技术与软件工程(2019年6期)2019-04-26
制造技术与机床(2018年11期)2018-11-23
制造技术与机床(2018年11期)2018-11-23
制造技术与机床(2017年4期)2017-06-22
通信电源技术(2016年1期)2016-04-16
