
最小可分辨对比度在机载电视系统中的应用研究
2011-06-07 01:34卜纪伟王建霞
电光与控制 2011年10期
卜纪伟,王建霞
(中航工业集团公司洛阳电光设备研究所,河南 洛阳 471009)
0 引言
传统的可见光成像系统的综合性能评价有分辨力、调制传递函数(MTF)和分辨灰度等级等,由于以上评价测试条件的局限性、单一性,这些评价结果仅代表在实验室条件下目标背景单一状态的成像质量,不能全面反映可见光成像系统处在复杂外界场景中的探测能力。最小可分辨对比度(MRC)不仅给出在某亮度等级能看到的最小细节能力,并且能给出看见的物体细节的极限对比度。
可见光成像系统的综合性能受空中环境及传感器成像链路各种因素的影响,所探测到的目标强度、纹理、对比度都有改变,因此,不是所有的有用信息都能被成像系统俘获、传递。由于各种环节衰减的存在,一个CCD成像系统输出的图像质量会因此而损失,飞行员最终所能感知到的图像质量是经过了眼睛、CCD探测器、光学系统、大气传输、显示器等环节衰减后的图像。在对用于机载条件下探测、跟踪、瞄准的可见光成像系统进行性能评价时,仅限于实验室条件下的光学鉴别率、MTF、调光范围、灰度等级等项目测试是不够的,这些测试所得到的数据没有一项能作为系统综合性能评价依据,也不能预估产品是否能达到要求的作用距离。为了解决军用目的可见光和微光夜视成像系统的综合性能评价和作用距离的预测,20世纪90年代国外科技工作者开始对最小可分辨对比度MRC进行了大量的研究[1-4]。国内于20世纪90年代后期也开始对可见光成像系统综合性能的相关理论研究[5-7],并在近几年开展了 MRC 应用和测试技术研究[7-13],MRC作为可见光成像系统综合性能评价指标已得到光电技术领域科技工作者认可。
1 MRC理论
一个可见光成像系统的MRC结果涉及到多方面因素的贡献量,如人眼的阈值视力、传感器的调制传递函数、大气对目标背景对比度的衰减、显示器的影响等,因此MRC仿真计算的数学模型建立比较复杂,经过了大量的实验室和战场的实际试验数据来拟合。
1.1 对比度
对比度指目标与背景的亮度之比,在机载探测跟踪的实际场景中,目标背景对比度是千变万化的,对不同对比度条件下的探测效果各不相同,对比度越高越容易被发现、识别,对用于探测、瞄准的CCD成像系统,一定要设一个考核用的对比度指标,系统的设计、测试、考核都会以这个指标为参考。
对比度有若干个定义,表观对比度、固有对比度和调制对比度[14-15],由于目标、背景在经过大气传输后,呈现在传感器之前的对比度是经过调制的,在MRC中所采用的是调制对比度,调制对比度定义为

1.2 对比度阈值函数CTF
真实外界物体很少有完全反射或吸收,外界场景中也很少有对比度完全一致的,一个典型场景中有无穷多对比等级组成,将这些不同的亮度不同空间频率对应的对比度阈值绘制成图,可以找到某个亮度等级的 CTF,见图1。
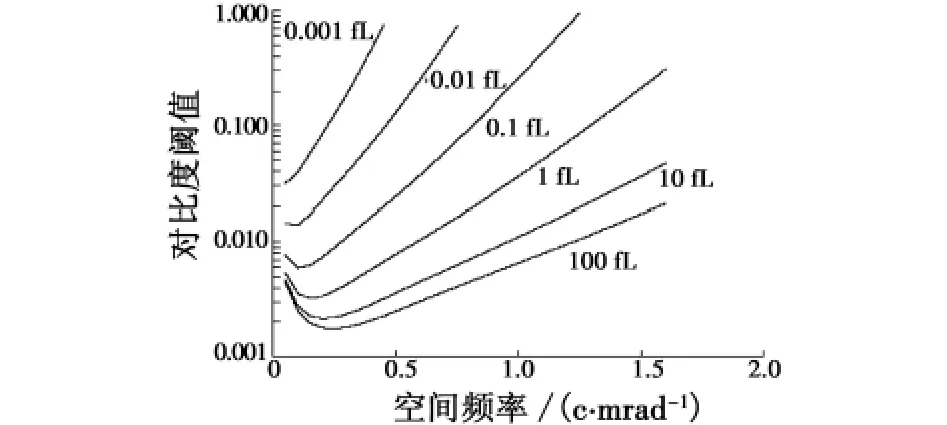
图1 CTF曲线图Fig.1 Curves of CTF
在每个亮度等级对应的极限分辨率是CTF曲线与对比度的交叉,极限分辨率只能给出在某亮度等级能看到的最小细节,并且这个细节是在最好的对比度看见的细节,一般实验室测试分辨率靶板的对比度是1∶1。CTF可提供比极限分辨率更多的信息,能给出所有空间频率的阈值对比度。
CTF曲线随着亮度等级降低而上升,CTF曲线上升意味着极限分辨率下降,并且也意味着在不同频率能看到最小对比细节能力的损失。
1.3 裸眼的极限视力
眼睛能看到最小对比度差别的能力称为临界品质视力,CTF代表眼睛所能看到目标背景极限情况下的对比度。
图2为CTF的测试图,当使照度均匀到人眼的常值时,降低杆图的对比度直到观察者要较长时间才能看到它,即黑杆变亮,亮杆变黑,再平均到正常值,直到杆-空间-杆出现,然后增加对比度,直到杆再次出现。在杆图出现和再次出现之间的平均对比度定义为杆图在修改照明条件下的阈值对比度。以不同的空间频率,重复上述的程序即可得到不同空间的频率在每个亮度等级的阈值对比度曲线,每条曲线即代表在那个亮度等级的CTF。

图2 CTF测试图Fig.2 Test of CTF
CTF数学表达式为

其中:ELBAR为亮条照度;EDBAR为暗条照度;EAVERAGE为平均照度。
图3为对应不同亮度眼睛CTF曲线,横坐标是空间频率,纵坐标是对比度阈值。每根曲线代表不同亮度等级对应眼睛的CTF。这些曲线用调制纪录来描述对比度,因此对比度表示为

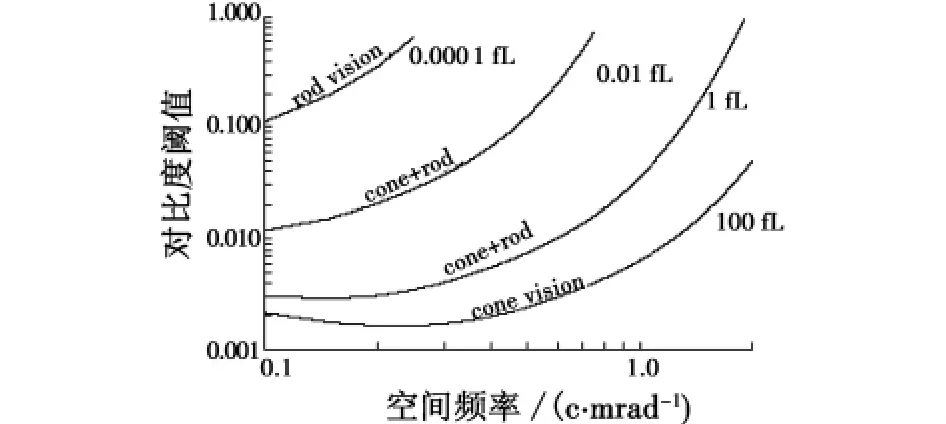
图3 眼睛在不同显示亮度等级不同空间频率的CTFFig.3 CTFs at different brightness levels and different space frequencies
眼睛能看到最小对比度差别的能力是临界品质视力。从图3中可以看到眼睛看到最小对比度的能力随视力的损失而改变,CTF曲线随着亮度等级减少而上升。CTF曲线的上升导致极限分辨率下降,并且也使在任意频率所看到最小对比细节的能力减弱。从图3还可以看出人眼在高亮度等级条件下,观察中等空间频率目标比低空间频率目标时视力阈值要好。
1.4 具有成像传感器的阈值视力
在通过成像系统观察图像时,成像传感器和显示器将使图像模糊,并且噪声增加,人眼从显示器上观察图像阈值视力将下降。MRC,MTF,CTF对应关系表达为

考虑噪声对MRC的影响,设kcal是修正系数,α(f)是滤波传感器杆图频率f噪声对峰值信号的比值,则:

没有噪声时,方程(5)简化为方程(4)。
1.5 完整的MRC
在实际通过传感器观察图像时,所得到的图像效果包含了探测器、显示器和眼睛的各种衰减和影响,数学表达式[1-3]为

式中:H(f)为系统调制传递函数;kcal为修正系数;BL,BW为在靶条积分宽度和长度方向的噪声带宽;SL为测试靶条长度方向的积分信号振幅;te为眼睛积分时间(低亮度级在200 ms左右,高亮度级在50 ms左右);Eav为测试靶上的电子通量;f为测试靶的空间频率。
2 利用MRC进行作用距离预计
可见光电视成像系统作用距离可以通过几何方法来估算,但那仅仅能计算出满足探测作用距离的传感器的几何参数,没有考虑目标背景对比度、大气传输衰减、传感器光学像差和电子线路的噪声等因素的影响,实际的机载电视成像系统受这些因素影响后,作用距离要比几何计算有所下降。美国陆军通讯与电子指挥中心夜视和传感器董事会在进行大量实验室和战场试验后推出SSCAM(The Solid State Camera)模型,可在设计阶段仿真计算出CCD或其他凝视型光电成像系统的MRC,并以MRC为基础预算设计的传感器所能达到的作用距离。
在产品研制完成后,对系统性能的评估是进行试飞评价前的重要环节,可以通过实验室评价及早发现问题,减少盲目飞行试验造成的人力财力浪费,并可以缩短研制周期。CCD成像系统性能测试仪提供了对CCD成像系统MRC测试功能,通过实际测试得出电视成像系统的探测能力。
2.1 目标对应的空间频率
当通过成像系统观察目标时,目标的尺寸、距离和成像系统的分辨率即决定了所观察目标的空间频率。MRC测试图是用U.S空军1951标准三杆图(见图4),观察者能确定的背景上最小的可探测周数(靶条周数)是系统在这种目标、背景对比度下的分辨率。
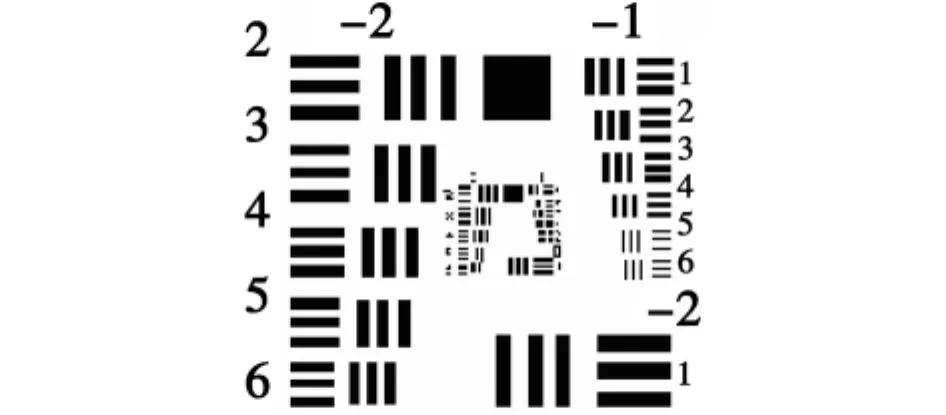
图4 U.S空军1951标准三杆图Fig.4 Standard“three bar”chart of U.S.Army
根据约翰逊准则,用目标等效条带图案可分辨能力来确定成像系统对目标的识别能力。在50%概率时,各探测水平的空间频率如下:探测/发现,1.0±0.25 lp;识别,4.0 ±0.8 线对;辩认,6.0 ±1 线对。
用MRC预计作用距离首先要确定目标在要求的作用距离上对应的空间频率,根据目标尺寸、作用距离和应该具有的识别等级对应的空间频率,计算MRC测试时目标的空间频率方程为

式中:N为识别等级要求的线条数;R为目标距离;L为目标尺寸;fr单位为c/mrad。
2.2 目标表观对比度
到达传感器物镜入口处的目标背景对比度是经过大气衰减后的表观对比度CT,在对产品进行综合性能预计及MRC测试时对比度计算可采用方程(8)[15-16],表达式为

式中:C0为原始目标背景对比度;e-σR为大气透过率。
对产品做MRC测试时,根据式(8)计算的CT结果选择对比度靶板。
3 MRC测试
3.1 MRC测试要素
MRC测试要素有:
1)MRC的测试设备,靶板经准直系统成像为平行光,视场足以使产品判读;
2)亮度设置,亮度应设在产品规定的工作范围之内;
3)对比度选择,至少选3种以上对比度靶板;
4)测试结果判读,按照不同的识别等级判读。
MRC的测试设备见图5,包括:亮度可调、亮度分布均匀的积分球、平行光管、被测产品、计算机、监视器。
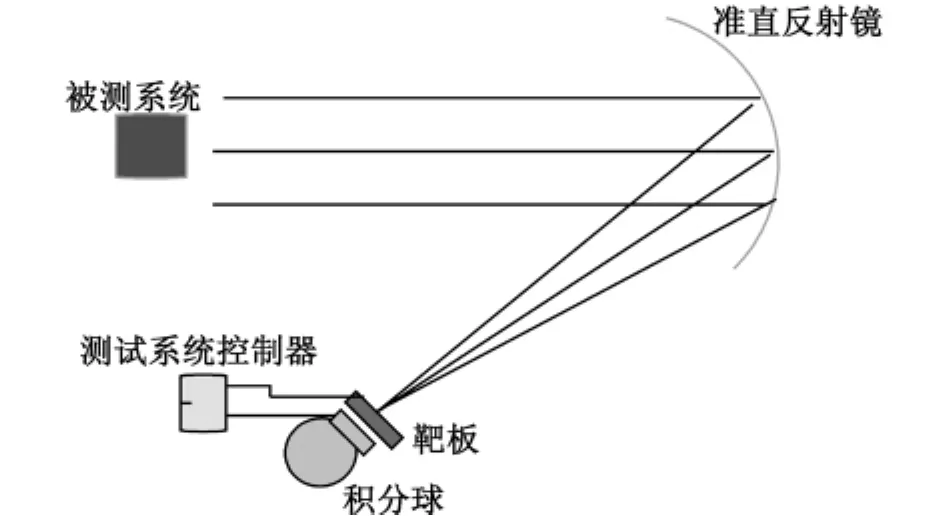
图5 MRC测试设备布局图Fig.5 Layout of MRC testing equipment
3.2 MRC测试中关键数据处理
测试时靶板亮度选择、对比度设置和测试结果正确判读是得到MRC结果的关键,经过多个型号产品测试,以上关键参数按照如下处理原则得到了合理的结果。
亮度:MRC测试必须设置积分球亮度,机载电视系统通常都具有自动调光功能,可以设置在产品不饱和的任意亮度范围内。
对比度选择:MRC测试要求至少选择3组以上靶板。
从使用角度考虑,测试时可选择的靶板按照如下原则:
1)100%对比度靶板,这一组可以反映系统不经过大气衰减的分辨率;
2)要求的探测距离,经过大气衰减后的对比度;
3)要求的识别距离,经过大气衰减后的对比度;
4)中间过渡点,为了使MTF曲线更平滑,可选择一到两个中间过度点。
测试结果判读:目前的测试设备还是主观评价,人眼在显示器上看到能分辨的一组靶。按照约翰逊准则中对探测、识别、分清的定义,在观察靶条时,能判断出靶条的方向即为在这个对比度下能识别的组数,在观察靶条时,能分清每个靶条即为在这个对比度下能分辨的组数。按照设备操作规程,可自动绘制出MRC曲线图,从MRC曲线上找到不同的对比度对应的空间频率。
4 实际应用
本文对MRC的构成,MRC理论模型,MRC预测作用距离的应用和MRC的测试方法进行了讨论,本节给出MRC在工程上的应用实例。
某电视成像系统环境条件为:能见度20 km,目标背景对比度0.4,CCD分辨率550TVL,测试评价产品作用距离。计算系统分辨率为19.6 c/mrad。按照考核的飞行高度计算30 km、40 km的大气透过率和等效对比度,结果见表1。

表1 对比度计算Table 1 Contrast ratio calculation
测试对比度靶板可选100%、70%、50%、30%、10%、5%。分别确定垂直和水平方向的可分辨组元数,100%对比度测试结果即系统的分辨率,测试结果见表2,测试的MRC曲线见图6。
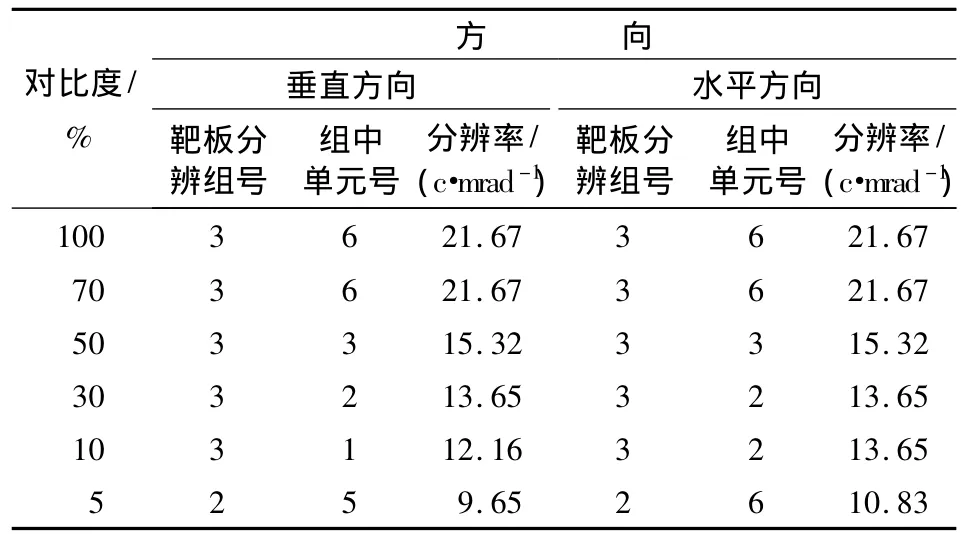
表2 MRC测试Table 2 Testing of MRC

图6 电视成像系统MRC测试结果图Fig.6 Testing result of MRC
从MRC测试图可以直观地得到不同的对比度所对应的分辨能力,如对比度0.05时,垂直方向可分辨9.6周的目标,水平方向可分辨10.8周的目标;对比度0.1时,垂直方向可分辨12.6周的目标,水平方向可分辨13.65周的目标,即在作用距离30 km,可识别10 m大小的目标。作用距离40 km可识别16 m大小的目标;可探测8 m大小的目标。经过多项产品实际测试,结果达到设计要求并满足使用要求,MRC测试预计作用距离满足设计要求的产品,经对真实目标探测具有较好符合性。
5 结论
该方法已经在多项实际任务中进行了验证,根据对目标探测识别结果看,按照文中所描述预计的可见光成像系统作用距离符合实际应用情况 。因此MRC作为可见光成像系统综合性能评价指标是可行的,是可见光成像系统在实验室评估产品作用距离有效的方法。MRC测试弥补了原来可见光系统只能用分辨率测试而不能评估作用距离的不足,作为可见光瞄准跟踪系统评价指标是客观的。
[1]VOLLMERHAUSEN R.Modeling minimum resolvable contrast of solid state[CD].Imaging Sensors ,Solid state camera version 1.0,2002.
[2]JENQUIN M J.A bridge between modulationt ransfer function and minimum resolvable contrast[C]//SPIE VOL2470,1995:380-385.
[3]JACOBS E,DRIGGERS R.The effect of noise in MRT/MRC theory electro-optical and infrared systems:technology and applications[C]//SPIE Vol.5612,2004.
[4]HOLST G C.CCD Arrays,Cameras and displays[Z].[s.n.],2000.
[5]孙卫东,丁贤澄.机载光电成像系统的像清晰度函数的研究[J].电光与控制,1998(3):33-39.
[6]王晶.电视跟踪系统作用距离分析[J].长春光机精密机械学院学报,1997,20(1):45-48.
[7]杨满忠,尹健,于雷.电视导引头作用距离研究[J].电光与控制,2003(2):27-30.
[8]罗华,张元.基于测量最小可分辨对比度的CCD相机成像质量的评价[J].光子学报,2009,38(3):681-684.
[9]王吉晖,金伟其,王岭雪,等.基于最小可分辨对比度的CCD成像系统最佳放大率研究[J].光学学报,2008,28(11):2125-2130.
[10]李文娟,张元,戴景民,等.可见光成像系统MRC测试技术的研究[J].计量学报,2006,27(1):32-35.
[11]王吉晖,金伟其,王霞.基于最小可分辨对比度的直视微光夜视系统[J].兵工学报,2010(2):182-190.
[12]金伟其.基于光电长相系统最小可分辨对比度的扩展源目标作用距离模型[J].光学学报,29(6):1152-1556.
[13]李升才,金伟其,张未强.一种基于强迫性选择MRC测量的新方法[J].光学技术,2006,32(2):230-233.
[14]何照才.光电测量[M].北京:国防工业出版社,2002.
[15]白延柱,金伟其.光电成像原理与技术[M].北京:北京理工大学出版社,2006.
猜你喜欢
高压物理学报(2020年6期)2020-12-01
兵器装备工程学报(2020年10期)2020-11-05
上海交通大学学报(2020年4期)2020-05-07
兵器装备工程学报(2019年7期)2019-08-13
兵器装备工程学报(2019年6期)2019-07-05
摄影之友(影像视觉)(2019年3期)2019-03-30
小天使·六年级语数英综合(2017年5期)2017-05-27
现代工业经济和信息化(2016年19期)2016-05-17
公民与法治(2016年23期)2016-05-17
中国中医眼科杂志(2016年6期)2016-04-08
