
空中交通警戒和防撞系统机动策略及仿真研究
2011-06-07 01:34沈佳峰敬忠良
电光与控制 2011年10期
沈佳峰,肖 刚,敬忠良
(上海交通大学航空航天学院,上海 200240)
0 引言
TCAS于20世纪80年代发展成熟并被广泛应用,是一种完全独立于地面雷达基站的二次雷达设备,为航空器提供空中交通监视和帮助避免空中相撞[1-2]。
TCAS在空中交通管制部门由于特殊情况,未能正常提供飞行间隔服务或管制服务而出现人为工作差错时,能有效地降低航空器相撞的可能性,是对空中交通管制工作的有益补充和监督。
TCAS虽然已经是相对成熟的机载设备,但在其功能的优化等方面依然有发展空间。国内外的许多学者在TCAS理论方面做了大量的探索工作。文献[3]介绍了TCAS系统的发展历史和整体架构。文献[4]介绍了TCAS的一些检测参数和灵敏度等级。TCAS系统的核心技术是最优机动策略,即空中防撞规避算法。本文重点推导了TCAS的规避算法,并且对尚未实现工程应用的水平规避算法部分也进行了探索。
1 最优机动策略
1.1 垂直规避算法
详细介绍垂直算法之前,先要说明一下CPA的概念[3]:CPA(Closest Point of Approach)为两机间最接近点的距离;Tau(τ)为入侵机到达两机最接近点CPA的时间。图1显示了两机最近点CPA的概念。

图1 两机间最近点(CPA)的距离Fig.1 The CPA distance between two aircrafts
图中,I1,I2,…,I5分别表示入侵机沿着 V1的方向在 t1,t2,…,t5时刻的位置;S1,S2,…,S5分别表示本机沿着V2的方向在t1,t2,…,t5时刻的位置。在t3时刻,即本机到达S3位置,入侵机到达I3位置时,两机的距离(S3,I3)达到最小,也就是 CPA。
1.1.1 垂直规避冲突态势
随着我国民航产业的发展,空域愈发显得拥挤。飞机在相互接近时可能处于图2所表示的冲突情况[4]。

图2 飞机垂直规避发生冲突的态势情况Fig.2 Possible conflict situations in vertical avoidance condition
1.1.2 垂直规避算法分析
TCAS计算机内含收发单元,通过上下两部TCAS天线发射询问脉冲,监视入侵飞机应答脉冲,从中取得入侵飞机的方位、距离、高度信息。通过对比本机的具体位置、高度、航向、高度变化率等信息,计算出入侵飞机的运动轨迹是否与本机的运动轨迹相冲突[5-6]。
图3表示在不同气压高度相对运动的飞机。虽然两机相遇时所处的位置有多种情况,但都可以归纳到图3表示的情况。
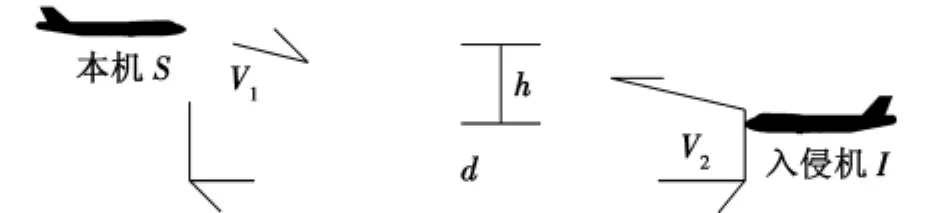
图3 不同气压高度飞机垂直规避策略Fig.3 Vertical avoidance strategy at different altitude
设本机S的速度为V1,入侵机I速度为V2。可以将V1分解为水平方向的速度V1x和垂直方向的速度V1y,其中+=。同样将V2分解为水平方向的速度V2x和垂直方向的速度V2y,其中+=。
当两机相对运动时,首先需要判定两机到达最近点(CPA)时相互之间的高度差h。根据国际民航组织关于飞行间隔的准则(如表1所示),在空中飞行时,必须保持一定的飞行间隔高度差H。即为保证飞行安全,两机在垂直高度上需相隔H以上。
当h>H或h=H时,不需要改变飞机的原有运动轨迹;当h<H时,必须有飞机改变运动轨迹,否则将无法达到安全标准。
垂直规避算法中威胁评估、发出告警的判据是“时间”,而非“距离”,即入侵飞机到达两机最接近点CPA的时间[7]。


式(1)和式(2)中:d为水平距离;V1x为本机S在水平方向的速度;V2x为入侵机I1在水平方向的速度;V1y为本机S在垂直方向的速度;V2y为入侵机I在垂直方向的速度;τR为水平范围的时间Tau;τv为垂直范围的时间Ta'u。
只有水平和垂直阈值都超出的情况才会触发TA(交通告警)或RA(决策咨询)。当τR与τv的值达到TA阈值时,飞机将发出TA告警,达到RA阈值时,发出RA告警,指示飞行员做出以一定的速度上升或下降的调整。具体的TA和RA阈值与两机所处的飞行高度有关,国际民航组织关于飞行间隔的准则见表1。当飞机的飞行高度在1000 ft(1 ft≈0.3 m)以下时,TCAS为避免与地面目标距离太近,将不给出RA告警。
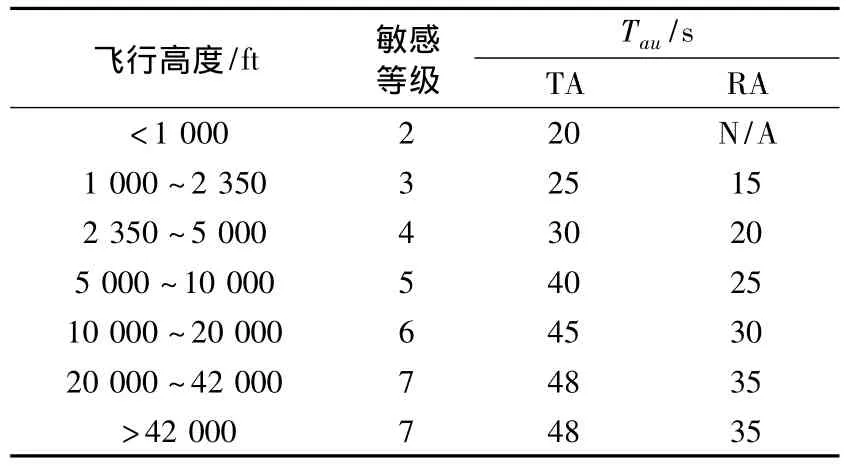
表1 敏感度等级(国际民航组织关于飞行间隔的准则)Table 1 Sensitivity level definition and alarm thresholds(ICAO)
两机到达RA阈值后,TCAS将给出具体规避策略。考虑到飞行员听到指令后会有一个反应时间,因此引入一个延迟时间ΔT,一般可将ΔT设置为2 s。首先判断本机是上升或是下降,可以根据RA告警时两机的相对位置确定,即如果本机相对在入侵机飞行高度之上就选择上升,反之则下降;其次确定垂直方向速度变化率。
依据当时的飞行高度确定两机的安全垂直间隔H、两机相对垂直高度差h、本机垂直方向速度V1y、本机水平方向速度V1x、入侵机垂直方向速度V2y和入侵机水平方向速度V2x。以向上为正方向,则TCAS给出的RA建议速度为

式(3)是本机上需要上升情况下的速度公式,式(4)是本机下降情况下的速度公式。式中的τR根据飞行高度的不同来选择。
1.2 水平规避算法分析
1.2.1 水平规避冲突态势
飞行器在空中飞行,有时受到空域的影响无法实施垂直规避,这时就需要水平运动来规避风险。假设本机与入侵机在同一水平高度上,当两机相互靠近时,可能出现如图4所示的态势情况。若要判断是否需要采用规避策略,则首先要分析两机轨迹是否有交点。如果没有交点,则不需要改变飞行轨迹,按照原飞行路线即可;如果有交点的话,则需改变本机原本的运动轨迹[8-9]。
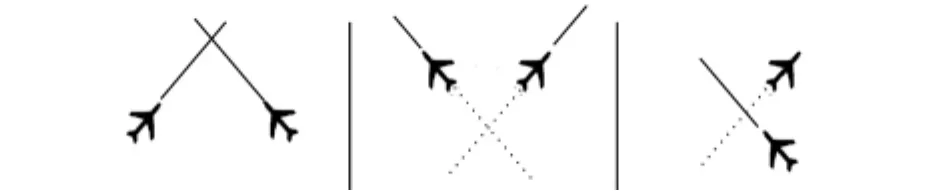
图4 飞机水平规避发生冲突的态势情况Fig.4 Possible conflict situations in horizontal avoidance conditions
1.2.2 水平规避算法分析
在只考虑水平规避的情况下,可以采用直角坐标系进行分析。
图5所示的是两架飞机在直角坐标系中的位置。通过上下两部TCAS天线发射询问脉冲,监视入侵飞机应答脉冲,从中取得入侵飞机的方位、距离。在图5中,角γ代表本机S航向角度;角θ为入侵机I航向角度数;V1、V2分别为两机在各自方向上的速度。为确保两机的安全,可设定两机水平最近点的直线距离为L。
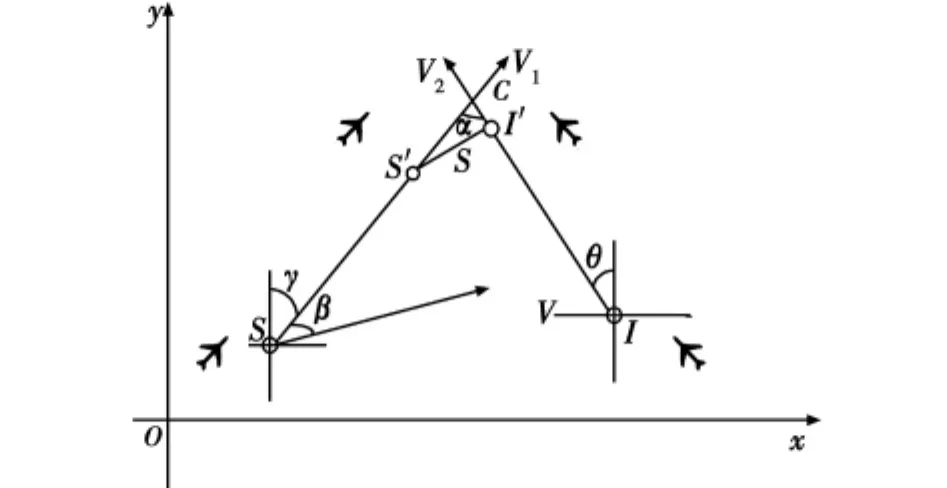
图5 水平规避策略数学模型Fig.5 Mathematical model of horizontal avoidance strategy
整个过程中选择原始速度慢的飞机改变航迹,原始速度快的飞机不变。下面假设以本机S速度慢,需要本机改变速度来说明。
设S为本机初始位置;I为入侵机初始位置。本机的速度方向为V1的箭头方向,大小为V1;I的速度方向为V2的箭头方向,大小为V2。
1)设置坐标。设本机在S点的坐标为(a,b),入侵机在I点的坐标为(c,d)则经过t时间后,本机到达S'(a+V1tsinγ,b+V1tcosγ),入侵机到达 I'(c -V2tsinθ,d+V2tcosθ)。
此时计算点S'和点I'的距离为


由式(6)可以求得S'和I'距离最小需要的时间tmin,可以推得S'和I'的最小距离

如果Dmin≥L m以外,则两机均不需要改变航迹。
2)如果Dmin<L,则需要本机S偏转β,以规避入侵机。计算β的目的是使本机以新轨迹(偏转角变为β+γ)运动后,与入侵机 I产生新最近点(S″,I″)。计算(S″,I″)的距离 D',即:
式(10)计算两机到达新最近点(S″,I″)的时间tm'in。式(11)可以得出β,即为达到两机水平最近点的直线距离L需要本机偏转的角度。整个过程中入侵机运动状态一直保持不变。
2 仿真实现
2.1 垂直规避算法仿真分析
利用Matlab仿真环境进行仿真[10-11]。两机相向飞行,初始参数设置为:安全距离H为1000 ft,延迟时间ΔT设定为2 s。本机和入侵机初始水平速度分别为800 ft/s和900 ft/s;两机的垂直方向速度均为50 ft/s,方向向上。图6给出了两机相对垂直高度差与时间的关系。
图6 垂直规避算法仿真结果Fig.6 Simulation result of vertical avoidance algorithm
同时得出RA告警结果,本机应该在水平速度不变的情况下,向上的垂直速度在原垂直速度的基础上增加21 ft/s。
2.2 垂直规避算法结果分析
从图6中可以发现在飞行员收到RA告警到做出反应ΔT时间,本机仍旧按初始轨迹飞行,因此与入侵机间的相对高度差没有改变。2 s后,飞行员遵从指令,以计算出的速度上升,从而拉开与入侵机之间的相对高度,直到达到安全距离1000 ft后停止。仿真通过具有代表性的算法模拟,充分体现出垂直规避算法的可行性。
2.3 水平规避算法仿真分析
水平规避算法基于Windows XP平台下的VC++6.0平台进行仿真。
图7 水平规避算法数据输入Fig.7 Data entry of horizontal avoidance algorithm
数据设置对话框中分别有本机设置A和侵入机设置B,输入数据分别有速度(m/s),角度(°),坐标位置(m),当输入数据后运行可以得出两机飞行轨迹。随机输入图7所示的数据,运行程序将显示出以下的飞行轨迹。
图8 水平规避算法仿真运行Fig.8 Simulation result of horizontal avoidance algorithm
图8中的两虚线分别表示A机和B机的初始状态的飞行轨迹,实线则表示偏转后的飞行轨迹。如果按照两机的初始状态,将在两虚线的交叉点出现碰撞。运行水平规避算法后B机保持原飞行轨迹,而A机做出偏转,以新轨迹飞行,从而规避了碰撞风险。同时计算得出为飞行安全而需要偏转的最小角度为4°。
2.4 水平规避算法仿真分析
水平规避算法软件将会根据输入条件模拟出A机与B机的轨迹,计算出两机以原有轨迹是否有威胁。如果需要改变轨迹,速度慢的飞机将会改变原有轨迹以规避威胁。虚线表示改变状态前的初始轨迹,实线表示改变状态后的轨迹。水平规避算法软件通过算法模拟,充分体现出本文所提出的水平规避算法可行性。
3 结论
本文阐述了空中交通警戒和防撞系统的产生背景和基本功能,描述了目标冲突态势下的机动策略,详细推导了垂直规避算法和水平规避算法,通过仿真证明了算法的可行性。目前水平规避算法仍停留在理论阶段,有待于工程上的实现。另外由于数字仿真与实际情况有所误差,以及理论分析中参数相对理想化等方面原因,今后的仿真设计和实现工作还需要继续的进步和完善。
[1]刘汉辉.空中交通警戒与防撞系统[M].北京:中国民航出版社,1996.
[2]熊华钢,王中华.先进航空电子综合技术[M].北京:国防工业出版社,2009.
[3]WILLAMS T,SPENCER N A.Development and operation of the traffic alert and collision avoidance system(TCAS)[J].Proceedings of the IEEE,1989,77(11):1735-1744.
[4]周其焕.交通警戒和防撞系统的技术特点和发展现状[J].航空电子技术,1999(2):10-16.
[5]ZEITLIN A D,ARINO T,KUCHAR J.Improving the resolution advisory reversal logic of the traffic alert and collision avoidance system[C]//IEEE/AIAA 25thDigital Avionics System Conference,2006:1-10.
[6]何晓薇,徐亚军.航空电子设备[M].成都:西南交通大学出版社,2004:165-216.
[7]LI Mei,KOKAR M.An example of horizontal conflict alert resolution using symbolic reasoning[C]//IEEE/AIAA Digital Avionics System Conference,2007:4.A.5-1-4.A.5-7.
[8]程丽媛.自由飞行空域中多机冲突探测与解脱技术研究[D].南京:南京航空航天大学,2005.
[9]郭军,朱凡.未知环境中的无人机航迹搜索策略[J].电光与控制,2008,15(3):57-59.
[10]赵源.航路飞行辅助决策仿真系统问题研究[D].西安:西北工业大学,2005.
[11]张志涌.精通Matlab[M].北京:北京航空航天大学出版社,2003.
猜你喜欢
计算机应用(2022年2期)2022-03-01
西安航空学院学报(2021年1期)2021-07-24
计算机应用(2021年4期)2021-04-20
计算机应用(2021年1期)2021-01-21
科学技术创新(2020年28期)2020-09-23
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
电脑爱好者(2020年6期)2020-05-26
现代装饰(2018年5期)2018-05-26
中国三峡(2017年2期)2017-06-09
