
INS辅助GPS载波跟踪环分析
2011-06-07 01:34:42韩慧珍陈红林王海勃
电光与控制 2011年10期
韩慧珍,陈红林,王海勃
(1.西北工业大学电子信息学院,西安 710129;2.中国人民解放军96656部队,北京 102208)
0 引言
由于GPS系统自身信号易受干扰、易丢失,使得传统的GPS接收机难以适应载体的高动态环境。现代独立的GPS接收机为解决这一问题,一般会使用一个对动态应力不敏感的锁频环(FLL)先把频率牵引至二阶锁相环(PLL)的线性工作范围,再由PLL进行精确跟踪[1],或者直接使用对加速度不敏感的三阶锁相环,但是三阶锁相环存在稳定性问题。利用惯性信息对GPS载波跟踪环的辅助是另外一种提高GPS信号完整性与连续性、适应高动态环境的有效手段。显然在GPS/INS组合系统中,采用第2种方案可充分利用系统的组合性,使辅助的设计和构建相对来说更加简单方便。GPS/INS最初的组合是松耦合,INS和GPS接收机各自独立工作,分别输出位置与速度信息,再由组合卡尔曼滤波器进行优化处理给出最优的结果,并反馈给INS进行修正。GPS/INS的紧耦合系统除了完成松耦合的任务之外,最重要的是系统还可将INS的量测信息或直接利用IMU(惯性测量单元)的量测信息辅助GPS跟踪环路,从而使接收机可从INS信息中校正多普勒频移导致的误差,大大减小了接收机沿信号传播方向的动态性,增强接收机对信号的跟踪锁定能力,从而提高组合系统的动态性能。由于INS信息的辅助涉及到组合系统中GPS接收机硬件结构的改变,所以,有些学者将具有惯性信息辅助GPS捕获与跟踪特性的组合系统又称为超紧耦合或深组合。
早在1990年左右国外已对GPS/INS紧耦合进行了系统的实验研究,并在1997年开始实际应用。但是国外的相关技术和产品对我国封锁或者人为降低可靠性,相应的技术必须自主研发[2]。本文对GPS/INS紧耦合组合导航系统的关键技术——INS信息辅助GPS载波跟踪回路进行了系统分析,并验证了紧耦合系统在高动态环境下的载波跟踪性能。
1 传统的GPS接收机载波跟踪环
1.1 GPS载波跟踪环工作过程
GPS接收机跟踪环路包括码跟踪环路和载波跟踪环路,两个环路同时工作,相互依赖。载波的跟踪与恢复是对GPS的C/A码信号进行相干解调的关键。在载波环保持锁定的情况下,它对码环按一定比例提供多普勒辅助,使码环有很高的跟踪精度。由于载波频率比码的频率要高得多,载体的动态应力对码环的影响远没有对载波环大,因此本文主要以载波跟踪环来进行分析。图1是GPS接收机的载波跟踪环一般结构图[3]。
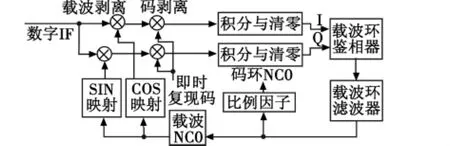
图1 载波跟踪环一般结构图Fig.1 General structure of carrier tracking loop
GPS的射频信号包括导航数据、C/A码以及高频载波(L1载波的频率为1575.42 MHz),GPS接收机天线接收到射频信号后,首先要将其进行下变频至中频(20 MHz),再经过A/D变换后才送入各通道进行捕获与跟踪处理[4],所以跟踪环路的输入是数字中频信号。为了能够提取载波上调制的导航电文,数字中频信号需要进行载波与码的剥离,即用本地复制的载波和即时伪码与中频信号相乘,此后,信号被转换成基带信号。图中的“积分和清零”过程是预检测积分,它在至少一个C/A码周期(1 ms)内进行测量平滑,平滑时间越长,噪声抑制越好,时间越短,动态性能越好,其同相输出I便可以提取出导航电文。鉴相器测量的是真实载波与本地复制的同相载波I的相位差,它的输出是环路滤波器的输入。滤波器以其设置的带宽来抑制噪声,通过滤波器的信号便是数控振荡器(NCO)的频率命令。NCO输出的是本地复制载波的相位,由此实现载波相位的锁定,即载波跟踪。
1.2 同相正交环(Costas环)
锁相环(PLL)作为一种载波跟踪环具有比其他跟踪环更高的跟踪精度,锁相环的种类很多,Costas环便是其中之一。在GPS接收机中载波跟踪环大多采用了Costas环,它对载波上的数据调制不敏感,用于估计相位误差。Costas环又称同相正交环,有与输入信号同相和正交两条支路,其基本原理如图2所示[5]。
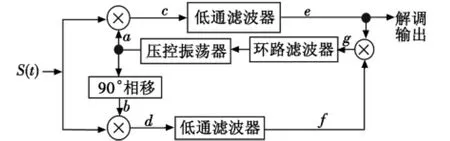
图2 Costas环基本原理图Fig.2 The schematic diagram of Costas loop
假设输入信号:

其中:m(t)=±1,表示调制的数据。
压控振荡器输出电压:

相乘后:
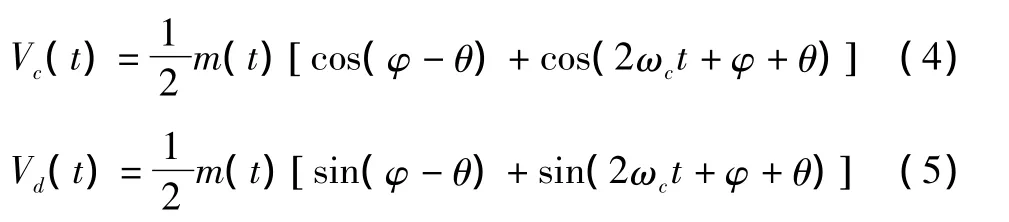
经过低通滤波器:
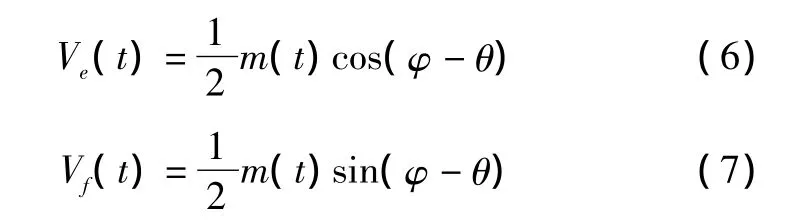
当φ-θ很小时,Ve(t)≈m(t),与 m(t)仅差一个系数,可以作为相干解调后得到的调制数据。
相乘后g点电压:

因为m2(t)=1,且当φ-θ很小时,sin(φ-θ)≈φ-θ,所以此时Vg≈(φ-θ)。窄带低通的环路滤波器的截止频率很低,只允许Vg中近似直流的分量通过,压控振荡器受Vg通过后的电压控制,其输出相位使φθ尽量小,当φ=θ时,Va就是Costas环提取出的载波,用来作为相干接收的本地波。
在GPS数字化接收机中,载波跟踪环采用数字电路实现,但其工作原理不变,环路滤波器是数字滤波器,压控振荡器改为数控振荡器,其指针由时钟和滤波器输出的相位误差值共同控制,而由鉴相器可以得到相位误差的估值。
1.3 GPS接收机锁相环模型
卫星与载体之间的相对运动以及GPS信号的传播与处理过程,会在纯净的GPS信号上叠加多普勒频移和各种干扰与噪声,使进入载波跟踪环路的信号频率已不再是fIF,而是有频率偏差,从而产生附加相移。这些偏差都由PLL估计并消除。
图3是一个典型的PLL连续频域模型,主要由鉴相器、环路滤波器和NCO三部分组成。NCO建模为一个积分器,它表示频率变化与相位变化之间的关系(f=2πω=2π˙φ)。F(s)为环路滤波器的传递函数。

图3 锁相环模型Fig.3 The model of a PLL
PLL模型的输入是GPS数字中频信号进行了载波与码剥离过程后的信号,即载波参考信号的相位。它包括原有的载波相位、由卫星与载体相对运动产生的多普勒频移及各种误差(热噪声、振荡器噪声、多路径噪声、射频干扰等)产生的干扰误差频移而导致的相位偏差。将干扰误差导致的相位偏差用wφ(s)表示,其余的相位分量用φr(s)表示。显然φr(s)给出了应跟踪的卫星信息和系统的动态信息,它是跟踪环应锁定的信号。PLL的输出是复制信号的相位φPLL(s)。PLL的跟踪频率fPLL(s)作为NCO的控制信号其实是通过环路滤波器后的频率偏差,也就是本地振荡器频率需要叠加的频率变化,来校正相位误差。整个环路的目的是使误差信号δφ(s)为零。稳态跟踪时,fPLL(s)主要包含多普勒频率fd、本地时钟频差fc(卫星的时钟频率很稳定,造成的频率偏差可以忽略)和噪声fn,其中噪声包括热噪声与各种干扰[6]。即:

环路滤波器对噪声信号起滤除作用,可以用环路带宽BL来反映环路对输入噪声的滤除能力。设环路的闭环传递函数为H(s),则环路带宽(Hz)定义为

环路滤波器的阶数决定了锁相环的阶数。传统的GPS接收机一般采用二阶的锁相环,假设环路滤波器为典型的比例加积分环节[7]:

二阶锁相环的闭环传递函数:
跟踪环路稳态误差:

A为视线方向上载体的加速度。由式(14)可知二阶锁相环对加速度应力敏感,会产生与加速度成正比的稳态误差,所以只能跟踪速度变化缓慢的载体运动。
1.4 多普勒频率
多普勒频率是由于卫星和接收机之间的相对运动造成的,GPS的PLL跟踪的是多普勒频率的动态变化。卫星的运动会造成大而变化缓慢的多普勒频移,而用户的运动(主要是加速度)造成的多普勒频移相对小却快速变化。对于一个静止用户,由卫星运动造成的最大多普勒频率为4.9 kHz,此时卫星的多普勒速度为929 m/s,这个速度相当于高速军用飞机的速度。当GPS接收机装在高速载体上时,多普勒频移的最大值可能达到10 kHz。多普勒频率的变化率主要是由卫星与用户的相对加速度造成的,单独由卫星运动导致的多普勒频率变化率最大为0.936 Hz/s,而用户1g(g为重力加速度)的加速度会造成51.5 Hz/s的多普勒变化率,相应的 10 g 加速度为 515 Hz/s[8]。
在GPS/INS紧耦合系统中,多普勒频率fd可以用INS的速度输出与卫星星历计算得到:

其中,vS为卫星速度,由卫星星历可得;vR为接收机的速度,组合系统中由INS提供;e为视线方向的单位向量;λ为L1的波长。
2 INS辅助的GPS载波跟踪环
2.1 INS辅助的GPS锁相环模型
惯导的加速度计通常能感测高达1.0 kHz速率的速度变化,其导航解的输出速率通常高于GPS接收机1~2个数量级。在紧耦合GPS/INS组合中,高速率的INS速度信息辅助GPS接收机,可消除跟踪环中载体大部分的动态因素[9]。
惯性信息辅助的实质是对GPS锁相环进行多普勒频率估计的辅助。惯性测量单元的信息与卫星星历数据共同估计载体运动的多普勒频移,并加到PLL的环路滤波器的输出上一起作为NCO的控制命令,PLL只需要跟踪多普勒的估计误差与其他误差。因为一般情况下,多普勒频率的变化速率是小于多普勒频率本身的,这样环路滤波器的带宽可以设计得更窄,以消除噪声。图4是对INS频率辅助的GPS锁相环的设计模型[6]。
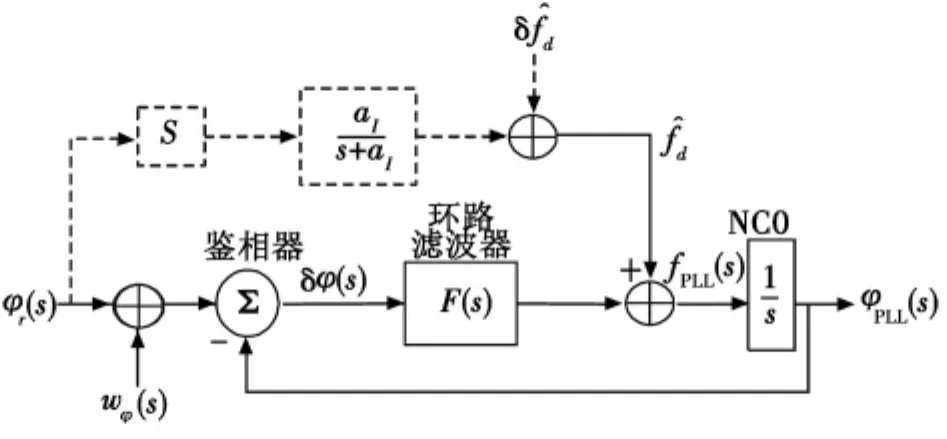
图4 INS辅助的锁相环模型Fig.4 The model of a Doppler-aided PLL
前馈支路表示的是INS多普勒估计的行为,支路的微分环节(s)把载波相位与载波频率联系起来,单极点的低通滤波器代表对INS多普勒的带宽限制,δf^d代表频率估计的误差。建立这个模型的目的仅仅是为了得到频率辅助的PLL的传递函数,并不是实际的物理描述,所以前馈支路用虚线来表示。
从模型中我们可以得到:
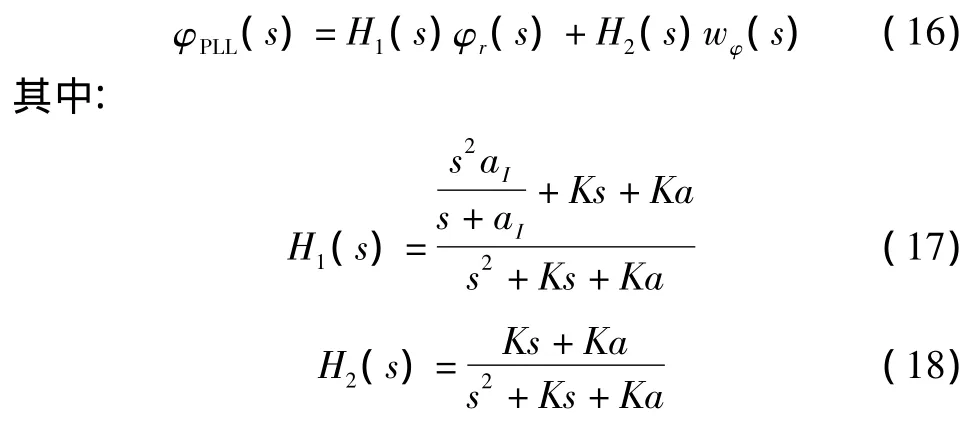
比较式(13)与式(16)可知,在有INS辅助的条件下,动态信号φr(s)和相位噪声wφ(s)分别作用于不同的传递函数H1与H2,使关于φr(s)的环路带宽和关于wφ(s)的环路带宽可以不同。传统的GPS接收机采用的二阶锁相环,动态信号与噪声在一起处理,环路带宽大约是12~18 Hz。在紧耦合系统中,由于GPS信号的动态部分被INS的辅助补偿,关于噪声的环路带宽可以保持在3 Hz[10]。设没有外界辅助时的环路有效带宽为15 Hz,有INS辅助时的环路有效带宽为3 Hz,取二阶锁相环的阻尼因数为经验最佳值0.707,环路参数取不同值时,环路带宽如表1中所示。
由表1中的数据可以看出:1)通过H13、H2的比较,F(s)的参数K,a不变,aI取100 Hz时,φr(s)的环路带宽要比wφ(s)的带宽大将近10倍,使高频的动态信号更容易被跟踪;2)比较H11与H12可知,在INS有辅助且aI一定的条件下,环路滤波器的参数对辅助回路的带宽的影响并不大。
2.2 仿真分析
根据上述的分析,在Matlab环境下可得传递函数的波特图如图5所示。由仿真结果可得如下结论:
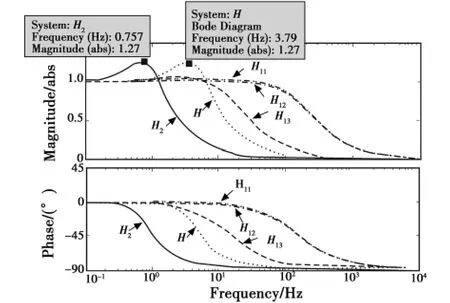
图5 PLL跟踪环的传递函数波特图Fig.5 Bode plots of PLL transfer functions
1)H11、H12、H13曲线表明,环路滤波器的参数对动态信号的影响不大,aI的取值才是关键,aI越大,对动态信号的跟踪性能越好,符合理论分析;
2)通过H与H2的曲线比较,相对于没有辅助的15 Hz带宽,有外界辅助3 Hz的环路带宽在噪声通过时响应的最大幅值与前者是一样的,而环路的跟踪误差接近零的频率要小一个数量级,表明低带宽环路能更好地抑制噪声;
3)在H13所表示的情况下,当预检测积分时间取2 ms时,具有10g加速度的高速(1000 m/s)军用飞机造成的多普勒频率是21 Hz,对有INS辅助的系统,这个频率是完全可以被跟踪的。
3 结束语
本文通过系统地分析GPS载波跟踪环分别在无辅助与有外界辅助条件下的模型,并进行传递函数的推导与仿真分析,证明了在GPS/INS紧耦合系统中,由于动态信号和相位噪声分别作用于不同的传递函数,动态信号的环路带宽大大高于相位噪声的环路带宽,从而使跟踪环路既能很好响应高动态信号又能有效地抑制噪声,有效提高了载波跟踪环的动态性能与抗干扰性能。需要注意的是,跟踪精度主要会受的影响,而的精度显然是受惯性元件的精度限制。若使用战术级的INS,可以使跟踪带宽更小一些。
[1]唐斌,董绪荣,杨保平.GPS软件接收机基带信号处理研究[J].电光与控制,2007,14(1):115-119.
[2]唐康华,吴美平,胡小平.MEMS+IMU辅助的高性能GPS接收机设计[J].测绘学报,2008,37(1):128-134.
[3]吕艳梅,李小民,孙江生.高动态环境的GPS信号接收及其算法研究[J].电光与控制,2006,13(4):24-27.
[4]KAPLAN E D.GPS原理与应用[M].寇艳红,译.2版.北京:北京工业出版社,2007.
[5]樊昌信,曹丽娜.通信原理[M].6版.北京:北京国防工业出版社,2006.
[6]ALBAN S.Design and performance of a robust GPS/INS attitude system for automobile applications[D].Stanford:Stanford University,2004.
[7]王惠南.GPS导航原理与应用[M].北京:科学出版社,2003.
[8]TSUI BAOYEN J.GPS软件接收机基础[M].陈军,等译.2版.北京:电子工业出版社,2007.
[9]周坤芳,吴晞,孔键.紧耦合GPS/INS组合特性及其关键技术[J].中国惯性技术学报,2009,17(1):42-45.
[10]BABUL R,WANG J.Dynamics performance of carrier and code tracking loops in ultra-tight GPS/JNS/PL integration[C]//IEEE Indicon.2005 Conference Chennai,2005:233-236.
猜你喜欢
测控技术(2018年6期)2018-11-25 09:50:18
电子制作(2018年19期)2018-11-14 02:36:40
电子测试(2018年14期)2018-09-26 06:04:00
上海公路(2018年4期)2018-03-21 05:57:46
电测与仪表(2017年24期)2017-12-19 05:15:22
电子制作(2016年1期)2016-11-07 08:42:41
系统工程与电子技术(2016年4期)2016-08-24 07:46:04
电测与仪表(2015年9期)2015-04-09 11:59:28
电测与仪表(2014年8期)2014-04-04 09:19:36
现代防御技术(2014年6期)2014-02-28 18:26:27
