
基于博弈论的多UCAV对地攻击目标分配
2011-06-07 01:34唐传林杜海文吴文超翁兴伟
电光与控制 2011年10期
唐传林,杜海文,吴文超,翁兴伟
(空军工程大学工程学院,西安 710038)
0 引言
随着UCAV各项关键技术的迅速发展,UCAV协同作战将是未来战争的必然发展趋势[1]。在未来无人作战飞机侦察/打击一体化战争中,多UCAV协同作战不仅弥补了单架UCAV作战力量单薄等缺点,还能够对发现的多个目标同时进行打击。同时,对目标进行合理的分配能够最大程度消灭敌人、保存自己、充分发挥我方武器作战效能。目前研究目标分配所用的方法很多,如网络优化算法[2]、基于市场拍卖算法[3]、贝叶斯优化算法[4]、整数线性规划法[5]、基于满意度决策方法[6]、模糊算法[7]、遗传算法[8-9]和免疫算法[10]等。整数线性规划定性算法适用于小规模问题;遗传算法等启发式算法能够快速形成次优解,但交叉和变异操作会使计算性能较低。以上算法大都没有考虑到敌我双方的博弈对目标分配的影响,因此有必要对这个问题探索其他的算法。本文提出的算法是在目标分配时引入博弈思想,我方目标分配是根据对敌方行动进行预测后作出;使飞机对各个目标攻击更具有针对性,能够充分发挥武器效能。本文为所提算法给出了相应的仿真实例。
1 问题描述
无人作战飞机侦察/打击一体化典型的作战模式是UCAV飞到作战区域进行侦察巡逻,侦察到目标之后,由其机载武器摧毁地面目标;一旦条件改变失去目标,UCAV则恢复巡逻状态,继续进行侦察,然后攻击进行摧毁。在完成任务之后,UCAV退出作战区,返回基地。其任务剖面图如图1所示。
本文讨论UCAV在到达作战区域上空后,对该区域进行侦察后确定攻击目标时的目标分配问题进行研究,并做以下设定:各架UCAV级别相同;各机利用自身的传感器获取的战场信息上传指挥控制站,由控制站对所获取的战场信息进行处理,并将处理结果下传至各机。在作战区域执行侦察打击任务时,各架UCAV所挂载武器、在作战区域空间所处的位置以及自身运动状态等方面存在差别,导致各架飞机攻击同一目标时,对目标造成的毁伤效果和付出的代价不完全相同。在侦察中搜索到的目标所具有的个体属性价值和社会属性价值也是不尽相同的。个体属性价值是指用人力、物力、财力等修建这个目标所需要的成本,社会属性价值是指将目标击毁所产生的政治、经济、军事、外交等方面的影响所隐含的价值。
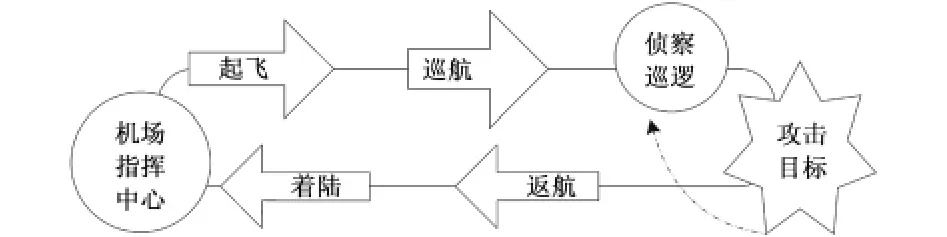
图1 UCAV作战剖面图Fig.1 UCAV combat profile
2 模型建立
2.1 UCAV协同作战体系结构
作战体系结构采用集中式体系结构。集中式体系结构对UCAV的智能化程度要求相对较低。如图2所示,地面控制中心接受各UCAV传来的战场信息和自主决策信息,结合军用侦察卫星等平台提供的相关信息,对战场态势进行评估,根据所选择的评估指标,在各机自主决策基础上进行协同目标分配决策,分别给各UCAV分配目标,再由UCAV对目标进行打击。
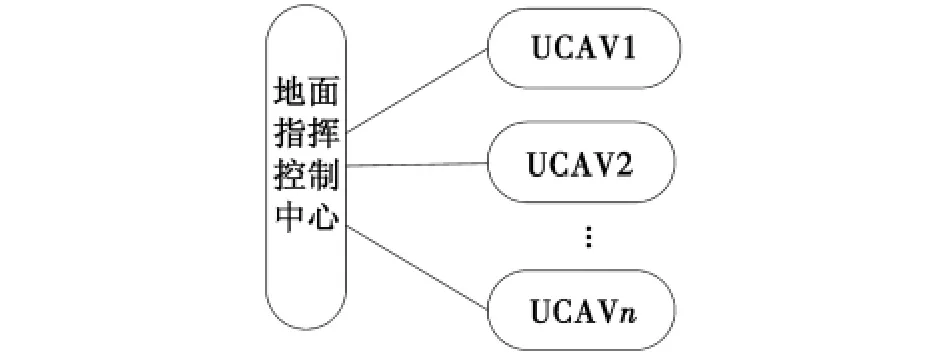
图2 UCAV集中式体系结构Fig.2 Centralized system structure of UCAV
2.2 自主决策函数和协同决策函数
2.2.1 自主决策函数
在UCAV对地作战中,各架UCAV根据挂载的武器类型的不同,要确定自主决策函数。无人作战飞机在对目标进行侦察后,在没有地面指挥控制中心及其他信息共享平台信息支援的条件下,UCAV依靠自身传感器所获得的态势数据按照优先准则构造自主决策函数。
假设一个编队有m架无人机,经侦察后发现有n个不同类型的目标,控制中心对各个目标的个体属性和社会属性价值综合进行归一化评估。设vj为第j个目标的价值归一化值,0≤vj≤1,j=1,2,3,…,n;设第 i架无人机对第 j个目标的毁伤概率为 pi,j,其中 i=1,2,3,…,m;j=1,2,3,…,n,则第 i架飞机对第 j个目标的毁伤期望为

第i架无人机对各目标的毁伤期望函数为

2.2.2 协同决策函数
设各架UCAV归一化的综合属性价值权重为si,0≤si≤1,i=1,2,3,…,m;qi,j表示第 i架无人机被第 j个目标毁伤的概率,i=1,2,3,…,m;j=1,2,3,…,n;则第i架无人机被第j个目标的毁伤期望为

则第i架无人机被各目标反击所付出的代价函数为

由式(2)推出:

式中,e*为UCAV的自主决策函数。由式(4)推出:

式中,w*为UCAV的代价函数。
在无人机自主决策函数和代价函数基础上构造协同决策函数y(e*,w*)为

基于协同决策函数 y(e*,w*),构造由 di,j构成的价值 /代价矩阵 D=(di,j)m×n,di,j为第 i架 UCAV 对第 j个目标的价值/代价的比值,其中:i=1,2,3,…,m;j=1,2,3,…,n。
2.3 指标函数
以价值/代价比最优、避免目标重复分配为原则构造指标函数:

2.4 基于博弈论的目标分配算法
文献[11]介绍了基于改进矩阵法的目标分配算法,但是该方法只考虑了我方的对策,没有考虑敌方对我方的行动可能会采取的对策。本文提出一种基于博弈论的目标分配算法。该算法的基本思想是:首先建立UCAV攻击地面目标的价值/代价矩阵,然后根据选取规则,搜索符合条件的元素,并将该元素所对应的目标分配至编队中相应的飞机。其具体分配步骤描述如下。
1)建立价值/代价矩阵。

di,j为第i架UCAV对第j个目标的价值/代价的比值。
2)确定第一架飞机攻击对象。以寻求最大或最重要目标优先被毁伤为原则,首先搜索全局矩阵,得到最大的元素 di,j,记下脚标 i,j;将第 i架 UCAV 与第 j个目标配对,即飞机 Ui攻击目标 Mj,记为:Ui→Mj。
3)调整价值/代价矩阵,确定攻击Ui的目标。根据博弈的过程,在我方确定首要攻击目标后,敌方会出动防御系统进行拦截,以我方出动飞机Ui为例,则敌方会在其所有的防御系统中选取对Ui毁伤价值/代价最大(在矩阵D中为最小)的武器进行拦截,因此先将元素 di,j乘以系数 β,β 是价值/代价下降系数,取值[0,1),β=0表示目标被选为攻击对象,被完全毁伤等情况。然后在第i行寻找最小的非零元素,得到元素di,a,a=1,2,3,…,n;a≠j,即敌方会出动目标 Ma拦截Ui,记为:。
4)再次调整价值/代价矩阵,确定攻击目标Ma的UCAV。本着消灭敌人、保存自己的原则,我方在除Ui以外的UCAV中选取对目标Ma价值/代价最大的UCAV去攻击目标Ma。因此先将矩阵D的元素di,a乘以系数β,然后在矩阵D第a列中搜索最大的元素,得到元素 dc,a,记下脚标 c,a;即飞机 Uc攻击目标 Ma,记为:。
5)判断目标是否完全分配完成。若未完成,则重复3)~4)的过程为其他飞机分配目标,直至完成全部目标分配。
6)分配结果提取规则:以价值/代价最优、避免目标重复分配为规则,优化目标分配结果。
基于博弈论的目标分配算法流程图如图3所示。
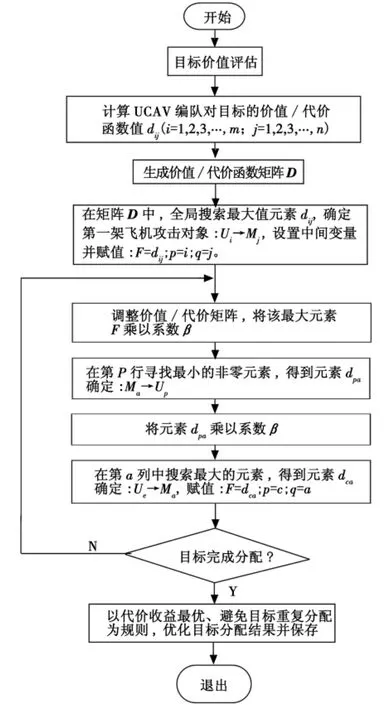
图3 基于博弈论的目标分配算法流程Fig.3 Simulation flow chart of target assignment based on game theory
3 仿真结果及分析
本节对上一节提出的基于博弈论的目标分配算法进行了仿真分析。
假定编队中,UCAV数m=10,通过侦察获得目标数n=7,目标的价值归一化值 V=[0.2161,0.2403,0.0337,0.2423,0.1678,0.0259,0.0739]。各 UCAV 对目标的毁伤概率如表1所示,UCAV的价值归一化值S=[0.0854,0.1495,0.1507,0.0246,0.1516,0.1494,0.0758,0.125,0.0222,0.0658],UCAV 被目标击毁的概率如表2所示,表中值是服从高斯分布的随机数。由式(7)得到无人作战飞机的价值/代价矩阵D,见表3。根据式(8)、式(9),运用基于博弈论的目标分配算法,价值/代价下降系数β设置为0,取=n,通过Matlab 编程仿真,得到最优化结果如表4所示。表中0值表示飞机没有分配到目标。

表1 10架UCAV对7个目标的毁伤概率Table 1 Kill probability of 10 UCAVs to 7 targets
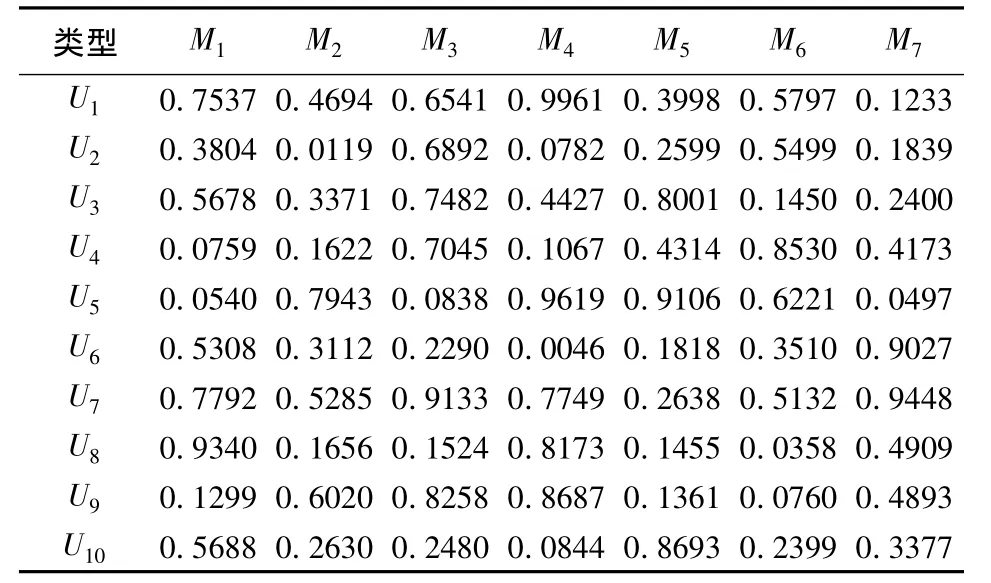
表2 10架UCAV被7个目标毁伤的概率函数Table 2 Kill probability of 7 targets to 10 UCAVs
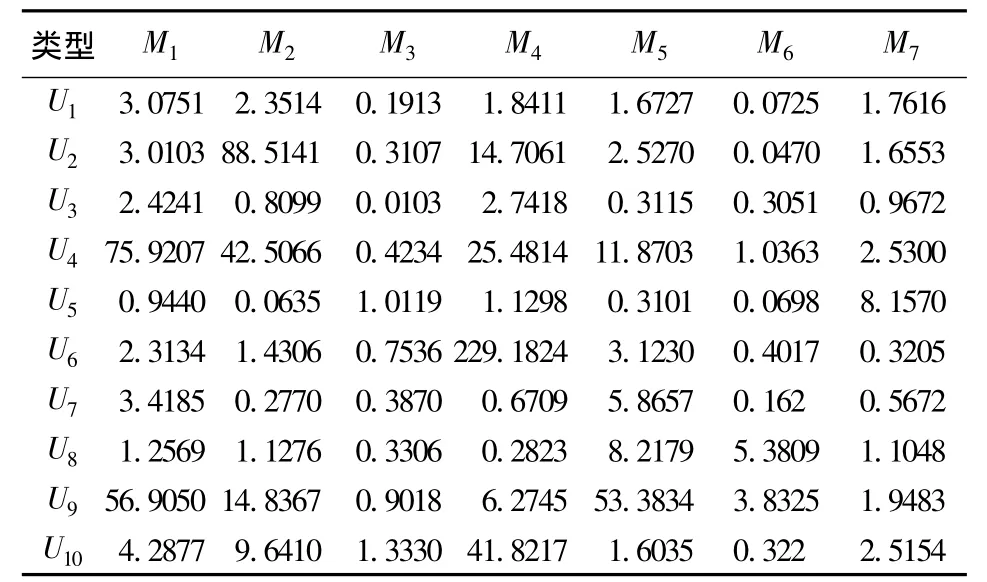
表3 10架UCAV对7个目标毁伤的价值/代价函数Table 3 Value/cost ratio of 10 UCAVs to 7 targets

表4 10架UCAV对7个目标的分配结果Table 4 Target assignment result of 10 UCAVs to 7 targets
由表4的结果可以看出,本文根据价值/代价最优、避免重复分配的原则建立的指标函数,运用基于博弈论的目标分配算法,可以获得合理可行的目标分配组合。
4 结论
本文就无人作战飞机察/打击一体化背景下,针对集中式体系结构下的无人作战飞机协同对地攻击目标分配问题进行了研究,建立了UCAV对地攻击目标分配模型。构建了自主决策函数和协同决策函数,提出了一种基于价值/代价比最优的效率指标函数,根据所建立的模型,提出了基于博弈论的目标分配方法。仿真结果表明,该算法是可行和有效的。
[1]U.S.Office of the Secretary of Defense.Unmanned aircraft system roadmap 2005-2030[R].A572734,2005.
[2]CHANDLER P R,PATCHER M,NYGARD K E,et al.Cooperative control for target classification[M].Cooperative Control and Optimization,Kluwer Academic Publishers,2002.
[3]TIERNO J E.Distributed autonomous control of concurrent combat tasks[C]//Proceeding of the American Control Conference,Arlington,VA,June 25-27,2001:37-42.
[4]张安,史志富,刘海燕,等.基于贝叶斯优化算法的UCAV编队对地攻击协同任务分配[J].电光与控制,2009,16(1):1-5.
[5]GRIGGS B J,PARNELL G S.An air mission planning algorithm using decision analysis and mixed integer programming[J].Operations Research,1997,45(5):662-676.
[6]叶媛媛,闵春平,沈林成,等.基于满意决策的多UAV协同目标分配方法[J].国防科技大学学报,2005,27(4):116-120.
[7]GARAGIC D,CRUZ J B.Target allocation using a binary integer programming with fuzzy objective[Z].OSU Workshop for DARPA MICA Program,2002.
[8]CHEN G S,CRUZ J B.Genetic algorithm for task allocation in UAV cooperative control[C]//AIAA Guidance,Navigation,and Control Conference and Exhibit,11-14 August 2003,Austin,Texas,AIAA 2003,5582:11-14.
[9]罗红英,刘进忙.遗传算法在目标优化分配中的应用[J].电光与控制,2008,15(3):18-20.
[10]周焘,于雷,任波.基于免疫算法的空战目标分配[J].电光与控制,2007,14(5):24-27.
[11]杨涛,周德云,杜昌平,等.改进的无人机编队内目标分配算法研究[J].计算机测量与控制,2008,16(11):1641-1643.
[12]孙永芹,马响玲,叶文,等.超视距多机协同多目标攻击系统研究[J].系统仿真学报,2008,20(8):2161-2164.
[13]付超,杨善林.基于博弈论的多无人机协同作战仿真系统[J].系统仿真学报,2009,21(9):2591-2594.
猜你喜欢
铁道通信信号(2020年9期)2020-02-06
数学大王·趣味逻辑(2019年5期)2019-06-13
小学科学(学生版)(2019年5期)2019-05-21
海峡姐妹(2017年12期)2018-01-31
作文与考试·初中版(2017年12期)2017-04-19
燕山大学学报(哲学社会科学版)(2015年3期)2016-01-05
应用数学与计算数学学报(2015年1期)2015-07-20
中学生(2015年12期)2015-03-01
现代企业(2015年6期)2015-02-28
中共宁波市委党校学报(2014年5期)2014-03-01
