
水池摇板式造波机传递函数研究
2011-06-07 10:23郑文涛姚木林
船舶力学 2011年11期
郑文涛,姚木林,兰 波,张 波
(中国船舶科学研究中心,江苏 无锡 214082)
1 引 言
2 造波机简介
拖曳水池造波系统由机械系统、电控系统和软件系统组成,图1所示为造波机摇板以及电动缸照片。其中,机械系统主要用于提供安装支撑以及推动池水运动以产生波浪,它包括18块摇板以及相应的支撑结构,造波板设计板宽为0.41 m,板高为2.1 m,板的浸深为1.6 m。电控系统包括控制计算机、多轴运动控制器、电机驱动器、交流伺服电机、电动缸、电控柜以及相关的辅助线路等,其作用是按照给定的运动条件驱动电动缸运动,从而驱动摇板运动。电控系统中控制器采用高性能奔腾CPU硬件平台,VxWork实时操作系统管理运动,并采用成熟的运动控制同步总线SERCOS-II用于同步控制,可在4 ms之内完全刷新99个伺服控制器的运动信息。软件系统由造波计算程序、操作服务程序和伺服控制程序三部分组成。其中造波计算程序主要完成各种类型波浪的离散化数据生成;伺服控制程序负责完成离散化数据的运动曲线的拟合,并驱动摇板以往复运动的形式描述出来;操作服务程序提供造波操作界面,负责调用造波计算程序,实现人机交互,完成上位计算机与控制器的通讯。

图1 造波机摇板及电动缸Fig.1 Segments and electric cylinders of wavemaker
3 传递函数理论计算方法
为了与试验得到的传递函数进行对比,本文首先对造波机传递函数的势流理论计算方法进行介绍。设水池为半无限长(或端部具有完全消波功能装置的有限长度),如图2所示,现考查理想不可压缩流体的二维运动。假设摇板作微幅摆动而且流体的运动是无旋的,则水池中波浪的运动可以用流场中的速度势Φ( x,y,t)来描述。
图中造波板运动位置可以描述为:

其中,X0(t)为水面处板的运动位置,f(y)用于描述造波机的形式(推板或摇板):

图2 造波运动示意图Fig.2 Sketch of segment movement

其中,h为水深,d为板浸深,参数σ表示造波形式,当σ=0时为推板式造波机,当σ=1时为摇板式造波机。
设摇板作如下周期性摇摆:

式中,Xa为摇板在水面处摆动的摆幅,ω为摇板摆动的圆频率。
基于势流理论,假设摇板作微幅摆动,并选取线性边界条件,则流体速度势Φ (x,y,t)应满足下列控制方程:
2.1.2 量表的重测信度 选取20例夜尿症患者于2周后进行重复测量,三部分的重测信度系数分别为0.743、0.786和0.725(P<0.05)。
设摇板作如下周期性摇摆:

当x→∝,Φ→沿x正方向传播的进行波(8)
满足上述边值问题的一阶解析解可表示为:

其中,参数k0和kn分别满足如下公式:2

造波板前的波面位移η为

当远离造波板时驻波成分将消失,并只保留第一项的进行波,此时波面高度也可表示为波高的形式:

其中波高H为

取摇板冲程S0=2Xa,则造波机波高和冲程的比值为

对于摇板式造波机σ=1,则波高和冲程的比值为

对于本造波机,设计水深为h=7 m,摇板浸深d=1.6 m,则可由上式计算得到本造波机的理论传递函数 R0。
4 水池传递函数试验
测试中采用的水池坐标系为如图3所示的右手直角坐标系,其中:X轴沿水池长边平行方向;Y轴沿造波机直立状态的板面方向;Z轴竖直向上。
波浪测试时,在水池中轴线上(即图3中a点)距离造波板50 m处安装一浪高仪,浪高仪安装如图4所示。本次测试采用的浪高仪型号为LGY-1A型,量程为600 mm,精度为1%,浪高仪经标定合格后使用。试验前测量造波板浸深为1.583 m。通过造波、采集波浪数据,并用波浪分析程序对波浪时历进行分析,得到统计结果。
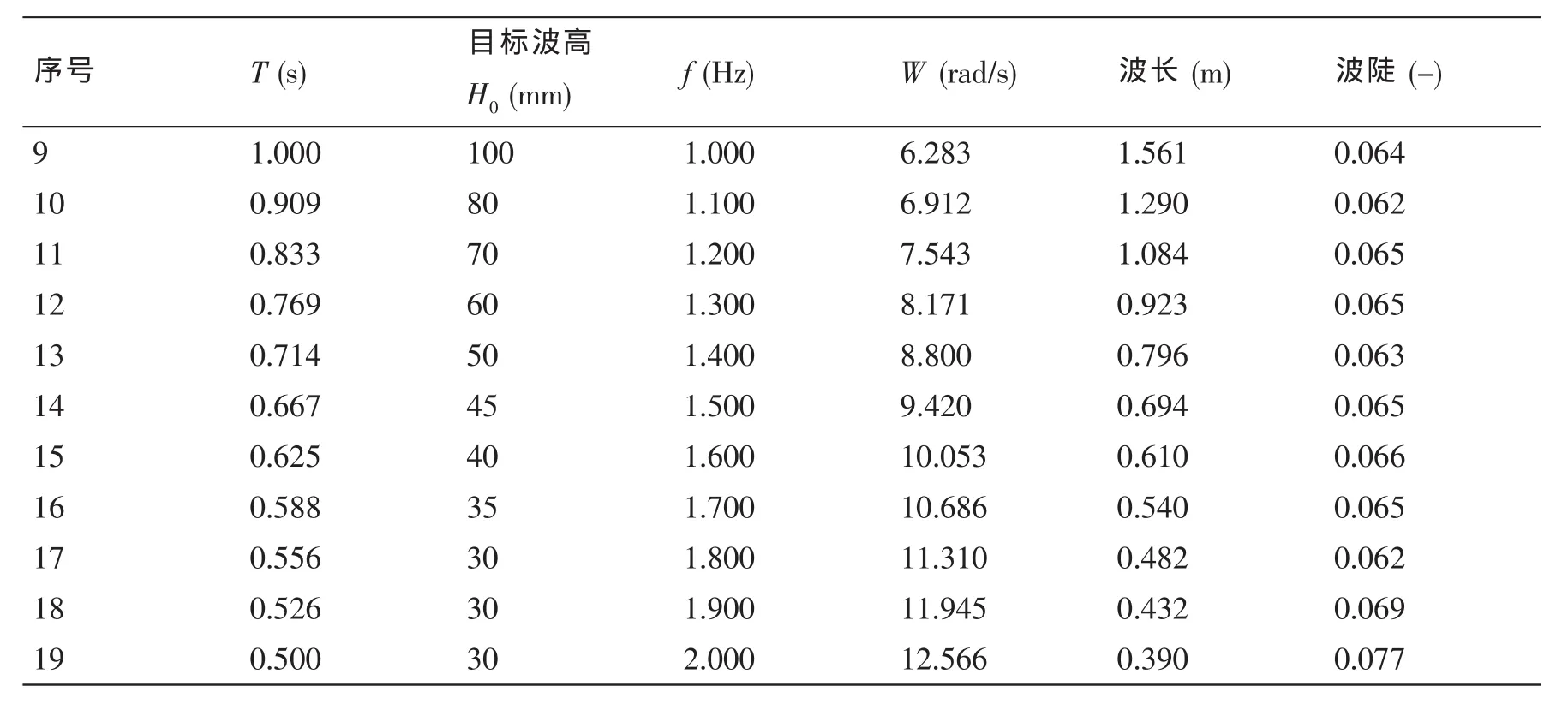
本次试验选取波浪频率为0.2~2.0 Hz的正向规则波,频率间隔0.1 Hz,选取的目标波高约为造波机最大造波能力的50%,试验工况如表1所示。
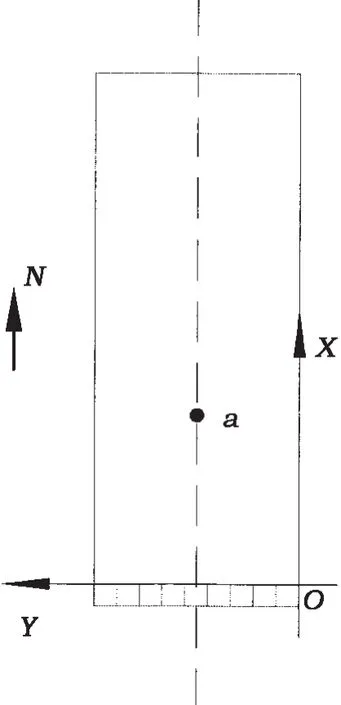
图3 水池坐标系示意图Fig.3 Tank coordinate system

图4 浪高仪安装图Fig.4 Arrangement of wave gauge

表1 传递函数测试工况表Tab.1 Test conditions of wavemaker transfer function
续表1
5 结果分析
通过测试、分析,得到实测波高Hm;再根据电动缸的运动幅值,可以得到设计水线处的摇板运动幅值Xa,进而可求得造波机的传递函数R′=Hm/2Xa。由于实测板的浸深为1.583 m,较设计浸深1.6 m小,故还需对计算得到的传递函数进行水浸深修正,得到设计水线处的传递函数R,本文采用线性修正的方法对水浸深进行了修正,计算得到的造波机传递函数如表2所示。由表2可知,频率较低时,造波机传递函数较小,制造单位波高所需的摇板板幅较大。
图5为实测传递函数R与理论传递函数R0的对比图,从图中可以看出,大部分频率下实测传递函数R约为理论值的95%;当频率为1.2~1.6 Hz时,实测传递函数较理论值95%略大;而当频率大于1.8 Hz时,R较0.95R0偏小,这一方面是因为短波在水池中消散较快,另一方面可能是因为频率较高时,系统响应能力较目标值偏弱。由实测传递函数与理论传递函数的对比结果可知,本造波系统具有良好的频响特性。
由对比结果可知,一般情况下,造波机实际冲程应按理论冲程增加5%才能制造出要求的波高。由于本次测试采用的波高并不是造波机的最大波高,根据造波机的一般特性,当波高增大时,系统传递函数会有一定的减小,因此,在进行造波机初步设计时,造波机的最大冲程应按理论冲程取大于5%的余量。

图5 传递函数对比图Fig.5 Comparison of transfer function between experiment and calculation

表2 传递函数测试结果Tab.2 Test results of wavemaker transfer function

续表2
6 结 论
本文进行了拖曳水池造波传递函数试验,并与势流理论结果进行了比较。通过试验得到,本造波系统具有良好的频响特性。同时,由比较结果可知,在进行造波机初步设计时,采用势流理论计算的造波机最大冲程应至少增加5%。
[1]郑文涛.多向造波机调试报告[R].无锡:中国船舶科学研究中心科技报告,2009.
[2]郑文涛.拖曳水池造波机测试报告[R].无锡:中国船舶科学研究中心科技报告,2010.
猜你喜欢
科教导刊·电子版(2022年5期)2022-03-19
初中生学习指导·中考版(2021年9期)2021-09-27
数学小灵通(1-2年级)(2020年10期)2020-11-14
测控技术(2018年7期)2018-12-09
现代制造技术与装备(2018年5期)2018-06-22
汽车之友(2017年2期)2017-04-14
电子制作(2017年24期)2017-02-02
中国卫生(2016年12期)2016-11-23
小学生导刊(低年级)(2016年11期)2016-11-14
光学精密工程(2016年4期)2016-11-07
