舰船目标一维距离像多姿态角相关匹配识别*
2011-06-06 10:06孙剑波席泽敏卢建斌
舰船电子工程 2011年11期
孙剑波 席泽敏 卢建斌 王 静
(海军工程大学电子工程学院1) 武汉 430033)(91257部队2) 舟山 316001)
1 引言
雷达目标识别是指利用雷达接收设备从目标的后向电磁散射信号中,提取目标的特征信息,并运用已有的目标先验信息,实现对目标的分类和识别[1]。目标的电磁散射特性在频域内可分为瑞利区(目标尺寸远小于雷达波长)、谐振区(目标尺寸与雷达波长相比拟)、光学区(目标尺寸远大于雷达波长)。由于目前高分辨雷达多工作在光学区,故对其目标识别的研究多集中在此区域。在光学区常用的目标识别方法包括基于目标一维距离像的目标识别方法、基于合成孔径雷达和逆合成孔径雷达二维像的目标识别方法等。合成孔径雷达利用距离和方位信息对地面静止目标成像,有着非常好的识别地面目标的能力,但是合成孔径雷达识别的有效性由于动目标在图像中散焦而受到限制[2]。雷达高分辨一维距离像能够提供目标的距离向结构信息,包含着目标散射点沿径向分布的强弱特征,提供了某姿态角下目标散射中心的位置和散射强度信息,并且具有易获取和处理的优势,因此基于一维距离像的识别方法首先得到应用,目前已应用到空中目标、地面车辆目标、海面舰船目标识别等各个领域[3]。
基于一维距离像的目标分类识别方法主要有相关匹配法、自适应高斯分类器算法、隐马尔科夫模型方法、神经网络方法和SVM方法等。其中以一维距离像直接作为特征的相关匹配法,是利用未知目标的平均距离像特征矢量与模板库中的各目标的模板距离像特征矢量进行相关,求其匹配度,根据匹配度最大者来确定目标的类别属性。这种方法以相关系数代表相似度,物理意义较为明确,可以避免目标平移运动的影响,充分利用目标所含信息,有效进行目标识别,实际应用较为广泛。
在实测时由于相对运动往往引起目标姿态角的变化,很难在某一角度附近对目标进行多次观测,较少的累积次数,导致相关匹配法的识别率相应降低,然而舰船目标的航迹往往较易得到,通过航迹可以推算目标相对观测点的姿态角,将多个不同姿态角下的一维距离像与模板求滑动相关,以最大相关系数代表识别正确的可能性,将其作为边缘概率分布,通过求多个姿态角下最大相关系数的联合概率,根据该联合概率大小来进行识别则可以较好地解决这个问题。
2 相关匹配法
相关匹配法最初应用于模式识别中的模板匹配,在一维距离像的识别中,以波型为特征建立目标模板,求得目标一维距离像与模板的最大滑动相关系数(相关匹配),通过比较各个目标相应的最大滑动相关系数的大小进行识别。
相关是指信号在不同时刻的状态之间存在着关联性,相关有两个方面的意义:1)信号和它自身的相关性,称作自相关。2)两个不同的信号之间的相关性,又称作互相关。无论是确知信号还是随机信号,相关的概念都是适用的[4]。因此可以利用两个信号的相关系数作为其相似性(或线性相关性)的一种度量[5]。
设x(n)、y(n)为两个离散信号,其相关系数定义为
在相关系数的基础上,定义x(n)与y(n)的所有延迟之间做滑动相关,所得相关系数的最大值为最大滑动相关系数。
若{x(n)}为目标一维距离像,{si(n)}为第i个目标的模板,N为一维距离像数据长度,则最大滑动相关系数为
其中分母部分起到归一化的作用,实质上决定这个相关系数大小的是分子部分,而分子部分就是相关函数rxs(τ)的最大值,这个求最大滑动相关系数的过程就是匹配的过程。
由相关系数的定义可知,相关系数为1,表明两个信号完全一致,相关系数为0,表明两个信号互不相关,相关系数的大小就表明了两个信号的相似程度。
在实际中受噪声影响,距离像为模板与噪声的叠加,设待识别目标为第j个目标,即

将式(3)代入式(2)的分子部分,得到

由于这种相关匹配运用于一维距离像处理的实质就是将一维距离像通过滑动对准再求相关系数,故在实际测量中,可以在对准后直接使用式(1)求相关系数,以减少运算量。
3 多姿态角相关系数联合识别
不同的目标,在某一姿态角下,如果散射中心的分布较为接近,则可能有非常类似的一维距离像,因此可能有相似的多个模板,观测到的一维距离像如果有较强的噪声的影响,往往不能正确识别。但是不同的目标不可能在每一个角度都有相同的散射中心分布,随着角度变化,散射中心分布将会产生游移,各模板将出现较大的区分,由于根据目标的航迹,能够判断目标的姿态角,故可以取多个姿态角下观测到的一维距离像进行联合识别。
设在θ姿态角下,有M个模板,目标Ti对应的模板为Si,目标Ti与第m个目标对应的模板Sm匹配,得到的最大滑动相关系数为ρim(θ),m=1,2,…,M。噪声影响较小时,Ti与自己相对应的模板Si最为相似,即ρii(θ)=max{ρim(θ)},但若存在Sj与Si较为相似,在较强噪声影响下,可能出现ρij(θ)≥ρii(θ),从而导致将Ti误判为Tj。但是当目标由于运动,姿态角变化Δθ至θ′时,根据Hudson等的研究[6],若Δθ>Δr/L,(Δr为雷达距离分辨率,L为目标长度),距离游移将使Ti、Tj的散射中心分布将产生较大区别,则在θ′姿态角下Si、Sj的相似度将逐渐减小,使得两者对应的模板更容易区分,从而使在θ姿态角不易识别的目标在θ′变得较易识别,因此采用多姿态角的一维距离像做相关匹配可以提高识别率,并且能够解决在实际观测中,难以累积得到同一姿态角下目标一维距离像的问题。


随着角度的变化,不同目标散射中心分布变化趋于不同,正确判决对应的相关系数将快速增加,误判对应的相关系数将迅速减小,且多姿态角累积判别的过程将使单次的误判对于联合概率的影响迅速减弱,这样,通过比较这个最终的多姿态角联合识别概率的大小,就可以更为准确的识别目标。
当目标沿径向向我方运动时,θ=0°或θ=180°,运用该方法可以减少随机噪声的影响,可作为该方法Δθ=0°的特例进行处理。
4 试验方法及结果
4.1 仿真实验
按照文献[7~9]的方法仿真得到目标T1、T2、T3、T4的模板S1、S2、S3、S4,仿真所用简单散射中心模型为

N为目标散射中心数,Ak为第k个散射中心强度,Rk为第k个散射中心与观测点距离,c为光速,f为雷达频率。仿真发射信号为线性调频信号,脉冲宽度10μs,带宽300MHz。为了增加目标之间的相似性,验证该方法在提高识别率上的效果,四个目标散射中心个数均为六个,且相对参考点的距离Rk和强度Ak存在一定的相似,相似性体现为:R1=R2,A1=A3,R3=R4,A2=A4,具体赋值为T1:R1=[0 60 85 100 140 200],A1=[1.5 2 3 5 2.5 1];T2:R2=[0 60 85 100 140 200],A2=[1 2 1 5 4 0.5];T3:R3=[0 100 130 140 160 200],A3=[1.5 2 3 5 2.5 1];T4:R4=[0 100 130 140 160 200],A4=[1 3 2 5 3 1]。
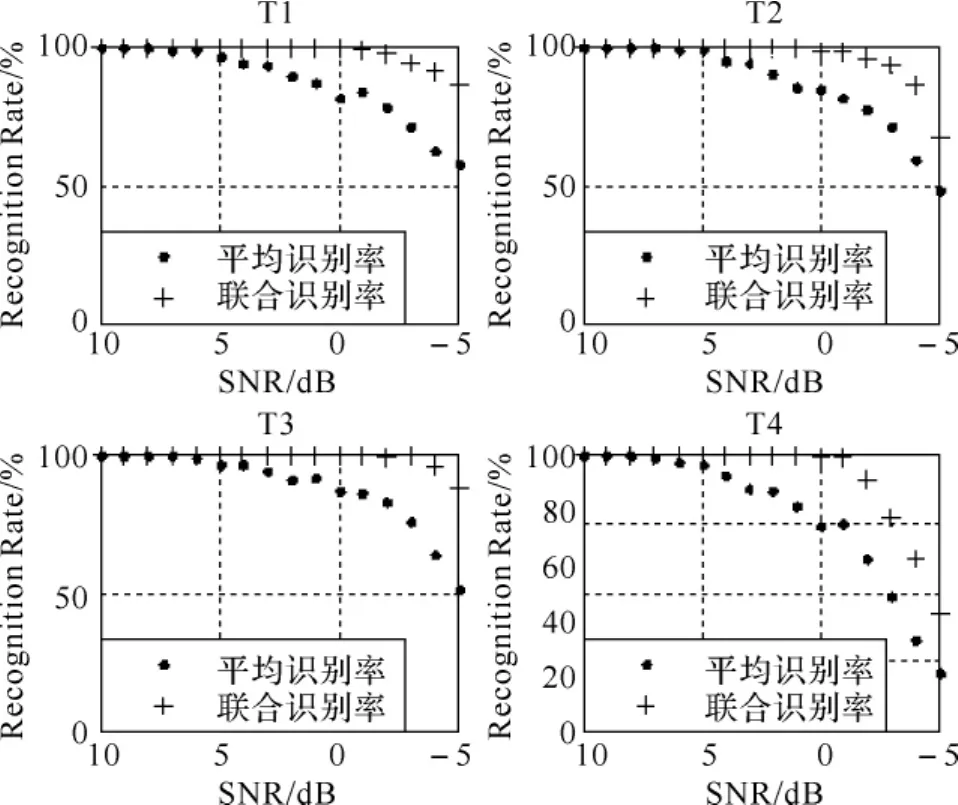
图1 单姿态角与多姿态角联合识别率对比图
1)通过向模板中添加高斯白噪声得到100组一维距离像观测值,信噪比10dB~-5dB,在0°~5°各姿态角分别相关匹配,得到的各单一姿态角识别率求均值,所得平均识别率与0°~5°多姿态角联合识别率进行比对,得到信噪比与识别率关系如图1所示。随信噪比增加,两种方法识别率均逐渐提高,但多姿态角联合识别率始终高于单一姿态角识别率均值,运用联合识别,比单一姿态角识别更为可靠。

图2 联合识别率随累积角度增加变化
2)在信噪比-5dB的高斯白噪声背景下,对以上四个目标100组一维距离像0°~10°进行联合识别,识别率随累积角度增加变化的情况如图2所示。由图可见,随着累积的角度增加,运用该方法的识别率逐渐上升。
4.2 实测实验
采用文献[10~11]实测所得数据,利用中心频率2GHz,脉冲宽度1μs,带宽200MHz的线性调频信号,得到四个简单目标模型的一维距离像,加入高斯白噪声,信噪比为10dB,所得单一姿态角识别率均值与多姿态角联合识别率对比如表1所示。联合识别率高于单一姿态角识别率均值,符合预期结果。

表1 实测单姿态角识别率均值与多姿态角联合识别率
5 结语
本文提出了一种以相关匹配法为基础,求得目标各姿态角一维距离像与模板之间的最大滑动相关系数,并通过将其归一化作为正确判别概率,通过引入联合概率计算提高目标识别率的方法。由仿真试验可知,通过多姿态角一维距离像相关匹配的联合识别,与单一姿态角相关匹配相比,识别率明显提高,并且随着累积的角度增加,可以在不提高处理难度的同时,提高相关匹配的识别率,从而提供了一种较为实用且容易实现的识别方法。
[1]王晓丹,王积勤.雷达目标识别技术综述[J].现代雷达,2003,25(5):22~26
[2]裴炳南.高分辨雷达自动目标识别方法研究[D].西安:西安电子科技大学,2002
[3]张仲明.基于高分辨一维距离像的雷达目标识别方法研究[D].长沙:国防科技大学,2004
[4]钱颖.基于自相关法的信号频率识别[J].内蒙古科技与经济,2009(13):50
[5]段丽娟,赵冬娥.基于相关系数的识别算法在破片测速中的应用[J].探测与控制学报,2010,32(3):27~30
[6]Hudson S,Psaltis.Correlation filters for aircraft identification from radar range profiles[J].IEEE Trans.on AES,1993,29(3):741~748
[7]黄德双.高分辨雷达智能信号处理技术[M].北京:机械工业出版社,2001:19~32
[8]姜义成.高距离分辨雷达目标识别方法研究[D].哈尔滨:哈尔滨工业大学,1997
[9]卢再奇.弹载毫米波雷达目标识别实现技术研究[D].长沙:国防科技大学,2002
[10]刘江波.基于SVM的舰船目标一维距离像识别方法研究[D].武汉:海军工程大学,2009:69
[11]吕建慧.基于HHT的舰船目标一维距离像特征提取方法研究[D].武汉:海军工程大学,2009:52~66
猜你喜欢
钢管(2022年2期)2022-11-28
学生天地(2020年3期)2020-08-25
中国听力语言康复科学杂志(2019年3期)2019-06-24
听力学及言语疾病杂志(2019年3期)2019-05-24
汽车观察(2018年9期)2018-10-23
意林(绘英语)(2018年1期)2018-04-28
中国高新技术企业(2017年5期)2017-05-05
物联网技术(2016年11期)2017-01-12
诗选刊(2015年4期)2015-10-26
汽车与新动力(2015年1期)2015-02-27