电动汽车试验运行参数监控系统研究
2011-06-05 09:43:54周雅夫,连静*,李骏,刘明辉,赵子亮,潘姝月
大连理工大学学报 2011年5期
周 雅 夫, 连 静*, 李 骏, 刘 明 辉, 赵 子 亮, 潘 姝 月
(1.大连理工大学 工业装备结构分析国家重点实验室,辽宁 大连 116024;2.大连理工大学 汽车工程学院,辽宁 大连 116024;3.中国第一汽车集团公司技术中心,吉林 长春 130011)
0 引 言
随着科学技术的进步与经济的发展,汽车已成为人们日常生活中离不开的交通运输工具,汽车工业在当代世界经济活动中发挥着巨大的作用,是最大、最重要的工业领域之一,已经成为改变整个社会面貌的一个重要手段[1].同时,汽车工业的发展所带来的对石油资源需求的急剧增加和对环境严重的负面影响引起了人们的日益关注.为了适应这个发展趋势,世界各国的政府,学术界、工业界正在加大对电动汽车开发投入的力度,加速电动汽车的商品化步伐[2].2009年2月,《节能与新能源汽车示范推广财政补助资金管理暂行办法》[3]中决定在上海、北京、大连、长春、武汉、深圳等13个城市开展节能与新能源汽车示范推广试点工作,为配合这项工作的开展,各地都加大了对电动汽车的研究力度.在新车型研发的过程中,需要随时掌握车辆的驾驶条件及运行状况,为后续车辆行驶工况的构建、控制策略的改进优化等提供技术支持,指导车辆进一步的优化设计.因此,本项目设计研发电动汽车试验运行参数监控系统.
1 试验设备及原理
电动汽车试验运行参数监控系统结合车辆自身已安装多处传感器的特点,通过控制器局域网(controller area network,CAN)通讯网络,将原车采集到的信号通过CAN总线发送给信号接收电路;由dsPIC33F微控制器利用串行通讯方式把数据传递给无线GPRS(general packet radio service)数据传输模块,再通过GPRS无线网关将所接收到的数据发送到Internet网络中;上位机通过无线网络实时接收、显示、存储数据,系统工作过程如图1所示.此方式既节约了成本,又方便地实现了对行驶车辆运行状态、电池工作状态、电机运行状态的远程监控和实时数据采集,可随时掌握车辆运行状况.
该系统主要由车载终端(下位机)和监测终端(上位机)组成;下位机采集汽车所需监测的数据,上位机通过网络接收并存储数据,如图2所示,其中 UART (universal asynchronous receiver/transmitter)为通用异步接收/发送装置,SPI(serial peripheral interface)为串行外围设备接口.
2 数据采集器开发
在下位机车载终端开发数据采集器,通过CAN总线接口与车载CAN总线进行数据实时共享,所有需要检测的信号参数都通过CAN总线被发送出来.利用无线GPRS数据传输模块将CAN总线上的数据通过无线网络传回上位机监测终端.

图1 系统工作过程示意图Fig.1 Sketch map for system working process
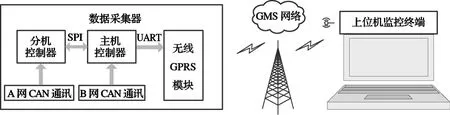
图2 系统设计原理框图Fig.2 Principle chart for system design
2.1 主控制芯片
下位机车载终端硬件部分,采用Microchip公司的dsPIC33F[4]微控制器作为本采集器的控制器芯片.通过两组CAN总线通讯电路,分别对电动汽车A网、B网实时数据进行采集.在控制器内部对数据进行处理后,通过UART将数据传输到无线GPRS数据传输模块,硬件结构框图如图2数据采集器部分所示,其中 GSM(global system for mobile communications)为全球移动通讯系统.
作为协调各部分共同工作的主控制芯片dsPIC33F,是一种高性价比、系统可靠性高、设计灵活方便的控制芯片.在数据采集器中,它用来控制CAN模块通讯、串口通讯、时钟芯片、存储芯片等多个部分协同工作.
2.2 CAN接口模块
CAN接口模块主要用于完成与车载CAN总线的通讯,接收所需参数,实现采集器与电动汽车内部控制系统之间的无干扰通讯.
德国Bosch公司推出的CAN[5]性能稳定、价格低廉,被广泛地应用于汽车内部网络.它是一种具有很高保密性,有效支持分布式控制或实时控制的串行通信网络[6].限于篇幅,此处仅以消息接收过程为例简要说明其通讯原理:当有CAN帧到达时,自动触发CAN底层硬件驱动程序的中断接收函数,此时中断接收函数会将最原始的CAN扩展帧报文存放到驱动程序的消息临时接收缓冲区中.协议栈的消息接收模块将调用相关函数对消息进行解析,通过计算29位CAN标识符所对应的J1939协议消息的参数组编号PGN值,来判断该消息是什么类型的消息,根据不同的消息类型进行不同的处理[7].
了解CAN通讯原理后,要选用可以配合协议的硬件设备.dsPIC33F芯片内部集成了增强型CAN控制器模块,因此无需扩展CAN控制器芯片,使用其内部集成的CAN模块进行电路设计,在降低成本的同时提高了电路设计集成度.为了与电动汽车上的信号传输相匹配,在CAN控制器模块与CAN总线之间增加了一片经典的CAN收发器芯片PCA82C250;考虑到车载环境的恶劣性,为进一步加强抗干扰措施,在两个CAN节点之间又增加了由高速光电隔离器件6N137[8]构成的隔离电路;CAN总线通信电路如图3所示.
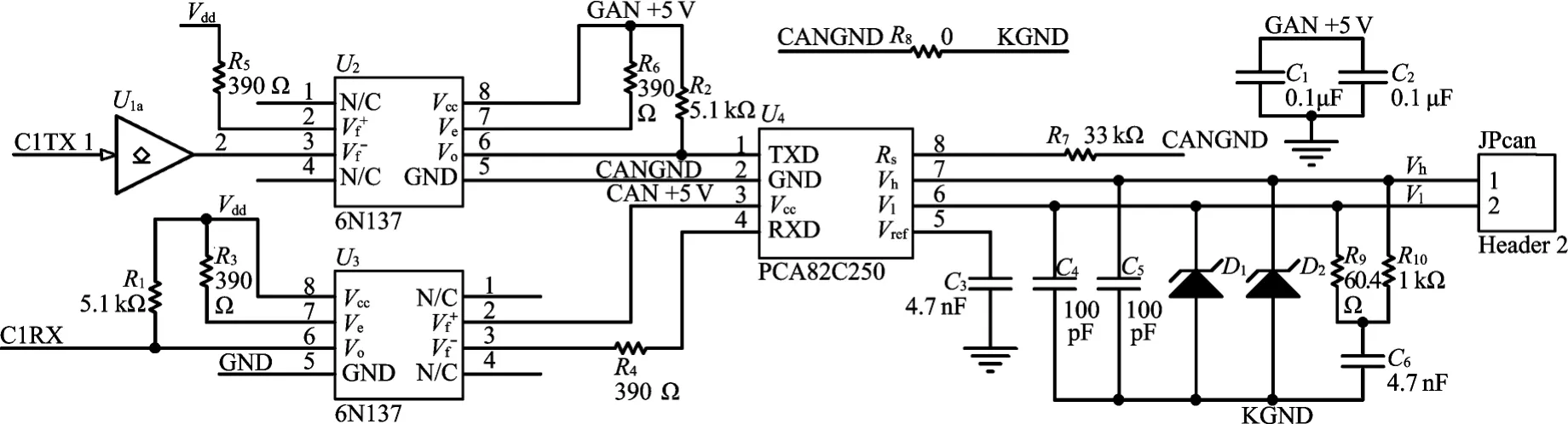
图3 CAN总线通信电路Fig.3 Communication circuit based on CAN bus
2.3 无线数据传输模块
GPRS是通用分组无线业务[9]的简称,是一种以全球手机系统为基础的数据传输技术,在用户和数据网络之间提供一种连接,给用户提供高速无线IP或X.25服务.因此,本文使用无线GPRS数据传输模块实现车载终端与上位机监控终端的无线通讯,实现实时数据的无线传输.将GPRS无线通讯技术与车载CAN总线通讯技术结合到一起,以精简的硬件结构实现了车辆实时状态远程在线监控的功能.对无线GPRS数据传输模块,完成简单的设置后,通过串行接口即可将从数据采集器采集来的数据通过无线网络发送出去.
3 上位机监测终端
PC上位机接入Internet网络后,可以从Internet网络上接收到无线GPRS数据传输模块所发送的数据信息,监测终端实现对车辆运行状态实时监测的功能.监测终端主要由后台程序、组态王显示界面程序、Access数据库3部分组成.在上位机上采用Visual C++6.0开发后台程序,通过Internet实现与多台无线数据传输模块的通讯,并监测无线数据传输模块的工作状态.采用组态王6.5开发前台程序,对车辆运行状态进行还原并显示.利用Windows NT的DDE(动态数据交换机制,dynamic data exchange)技术,将后台实时数据信息共享到前台监控中心软件,以图形、动画等形式实时显示CAN总线传输的数据,监控车辆的运行状态;并开发了自动绘制实时曲线、生成数据报表等功能.通过连接Access数据库,将采集数据存储起来,可随时查看与绘制历史曲线.在上位机可以监控和记录来自多台数据采集器的实时信息,上位机监控终端设计原理框图如图4所示.

图4 上位机监控终端设计原理框图Fig.4 Principle chart for host computer monitoring terminal
3.1 VC后台程序
采用Visual C++6.0开发数据接收程序,通过Internet网络实现与多台无线数据传输模块的数据通讯.Visual C++6.0通过调用与下位机中用到的宏电公司开发的GPRS数据传输模块配套的动态库wcomm_dll.dll中的API(应用程序编程接口,application programming interface)函数来完成和GPRS数据传输模块之间的通讯,API函数包括服务的启动、服务的停止、数据的发送、数据的接收、参数的配置、参数的查询等函数.当上位机接入Internet网络后,可以通过无线网络接收到来自下位机的整车数据、电机数据和电池数据.VC后台程序的显示界面如图5所示.
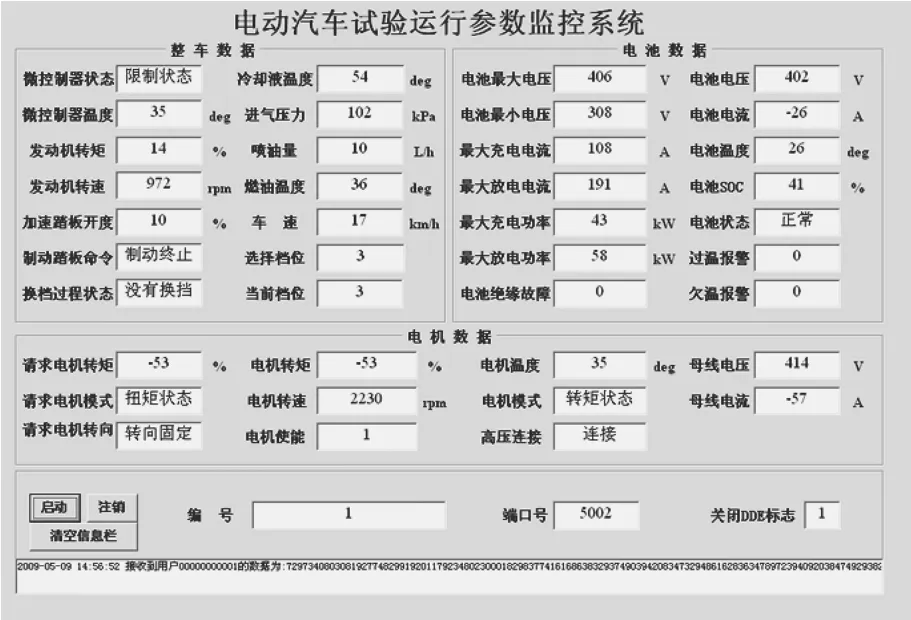
图5 VC后台程序显示界面Fig.5 Display interface for VC background program
3.2 组态王显示界面
采用组态王6.5开发前台程序,显示并监测车辆运行状态.利用Windows NT的DDE技术,将2.1节中后台程序接收到的实时信息共享到由组态王6.5开发的前台监控软件,以图形、动画等形式实时显示车载CAN总线采集的数据,监控各台车辆的运行状态,具有自动绘制实时曲线、生成数据报表等功能.另外通过组态王内部的Web发布功能,可以把当前数据显示界面发布到Internet网页上,这意味着除了运行上位机软件的计算机外,其他地域的计算机,只要可以上网,就能以网页的方式察看当前监控页面.开发的组态王实时数据显示界面如图6所示.

图6 组态王实时数据显示界面Fig.6 Real-time data display interface of the King View
3.3 Access数据库
采用Microsoft Office的Microsoft Office Access作为数据存储的数据库.利用SQL语句将来自VC后台程序的实时数据信息按照车辆编号分别存储在各自编号对应的数据表中,存储结果如图7所示.

图7 Access数据存储结果Fig.7 Results of Access data store
同时组态王可以通过内部的历史曲线控件调用存储在数据表中的数据来绘制各特定参数相对于时间的历史曲线图,如图8所示.
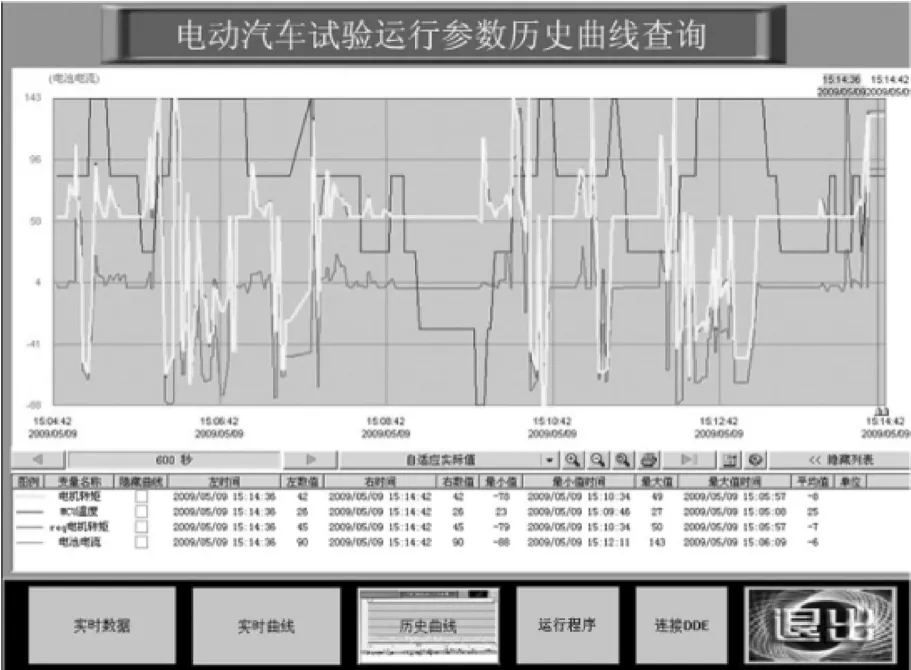
图8 历史曲线图Fig.8 Chart for history curves
4 电动汽车参数监控系统
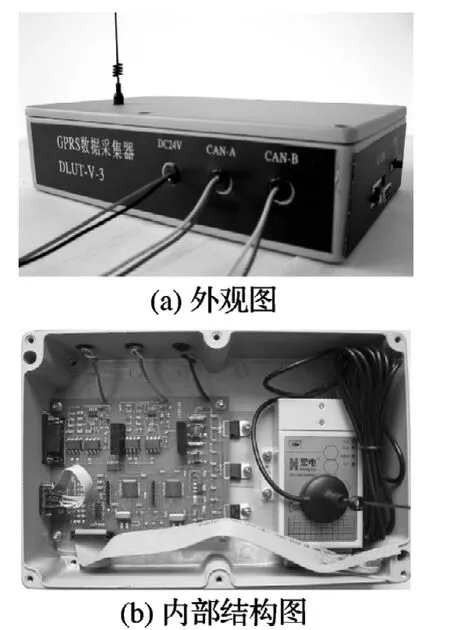
图9 数据采集器Fig.9 Data collector

图10 上位机监测终端工作界面Fig.10 Work interface of host computer monitoring terminal
图9为本项目开发的电动汽车参数监控系统中下位机数据采集器;图10为上位机监测终端工作界面.目前该系统已成功应用于大连市节能与新能源车辆大规模示范运营项目的数百辆混合动力电动汽车上,近6个月的实车测试表明该系统工作稳定、抗干扰能力强且易于维护,能够准确、可靠地完成实时数据的采集、传输和管理.所采集的数据可用于电动汽车能量回收分析、节油分析与优化、动态工况测试、控制策略改进等,为后续车辆的改进优化提供技术支撑.
5 结 语
本文设计开发了电动汽车参数监控系统,对车辆运行参数进行实时监测.目前,该系统在大连市节能与新能源车辆大规模示范运营项目混合动力电动汽车上的成功应用充分证明了其可行性及有效性.同时,也可将该系统应用于其他节能与新能源车辆、特种车辆等,只需将所开发数据采集器的CAN总线接口与被测车辆CAN总线进行数据实时共享,所有需要检测的信号参数就可通过CAN总线被发送出来,然后通过无线传输模块将CAN总线上的数据传回上位机监测终端,为后续车辆的改进优化提供技术支撑.因此,该系统具有广泛的适用性和良好的应用前景.
[1]胡 骅,宋 慧.电动汽车[M].北京:人民交通出版社,2003
[2]陈清泉,孙逢春,祝嘉光.现代电动汽车技术[M].北京:北京理工大学出版社,2002
[3]财政部,科技部.节能与新能源汽车示范推广财政补助 资 金 管 理 暂 行 办 法 [EB/OL].(2009-01-23).[2009-02-06].http://www.jste.gov.cn/ywdd/100137780.htm
[4]Microchip.dsPIC33FJXXXMCX06X08X10 data sheet[EB/OL].(2009-03-10).http://www.microchip.com/wwwproducts/Devices.aspx? dDoc Name =en024660
[5]王黎明,夏 立,邵 英,等.CAN现场总线系统的设计与应用[M].北京:电子工业出版社,2008
[6]GIL-CASTINEIRA F,GONZALEZ-CASTANO F J,FRANCK L.Extending vehicular CAN fieldbuses with delay-tolerant networks[J].IEEE Transactions on Industrial Electronics,2008,55(9):3307-3314
[7]阳宪惠.现场总线技术及其应用[M].北京:清华大学出版社,2008
[8]Avago Technologies. 6N137-High speed TTL compatible optocouplers [EB/OL].[2010-03-29].http://www. Avago tech. com/pages/en/optocouplers_plastic/plastic_digital_optocoupler/10_mbd_logic_gate/6n137/#
[9]LI Cheng,DING Tian-huai,CHEN Ken.Improved design of remote wireless transmission terminal using GPRS/GSM integrated network [J]. Computer Communications,2006,29(8):1163-1173
猜你喜欢
现代仪器与医疗(2021年1期)2021-06-09 05:53:54
测控技术(2018年6期)2018-11-25 09:50:12
测控技术(2018年8期)2018-11-25 07:42:08
车迷(2018年12期)2018-07-26 00:42:22
计算机测量与控制(2017年6期)2017-07-01 16:24:05
计算机测量与控制(2017年6期)2017-07-01 16:24:04
中国老区建设(2016年3期)2017-01-15 13:53:26
山东工业技术(2016年15期)2016-12-01 05:31:14
学习月刊(2015年3期)2015-07-09 03:51:04
电子设计工程(2015年8期)2015-02-27 12:05:26