永磁直驱风力发电机无传感器矢量控制研究
2011-04-27 09:52易映萍刘普吴金龙
电气传动 2011年4期
易映萍,刘普,吴金龙
(1.上海理工大学 光电信息与计算机工程学院,上海 200090;2.西安交通大学 电气工程学院,陕西 西安 710049;3.许继柔性输电系统公司,河南 许昌 461000)
永磁直驱风力发电机无传感器矢量控制研究
易映萍1,刘普2,吴金龙3
(1.上海理工大学 光电信息与计算机工程学院,上海 200090;2.西安交通大学 电气工程学院,陕西 西安 710049;3.许继柔性输电系统公司,河南 许昌 461000)
在背靠背直驱永磁风力发电系统中,无传感器控制技术一直是研究的热点。在双Y移30°六相永磁同步发电机数学模型的基础上,设计了一个基于饱和函数的新型滑模变结构观测器,用于估算电机的转子位置和速度。利用估算的结果,实现了永磁直驱同步风力发电机组的无传感器矢量控制。仿真和实验结果表明该设计的滑模变结构控制器对负载扰动具有很强的鲁棒性,并可以在较广的频率范围运行时准确地估算转子位置信息。而机侧系统通过监测风速变化实时调整发电机转速,达到最大风能捕获的目的。
PWM变流器;永磁同步发电机;滑模观测器;矢量控制
1 引言
在直驱型风力发电机控制系统中,速度传感器会引起成本增加可靠性降低等问题。因此无传感器控制系统成为变流器机侧控制系统的发展趋势。目前,估算转子位置角的方法主要有模型参考自适应法、状态观测器估算法、人工智能法等[1]。其中大多数估算方法都需要利用准确的电机参数。然而在实际中,发电机参数易受运行环境变化。因此,本文提出利用滑模观测器估算转子位置和速度。本文以直驱型背靠背变流器电路拓扑结构为基础,对永磁直驱风力同步发电机的无传感器控制策略进行了研究。同其他方法相比较,滑模运动与控制对象扰动无关,对数学模型的精度要求也不高,具有很强的鲁棒性[2]。
2 系统拓扑结构
背靠背双PWM变流器电路的拓扑结构如图1所示。发电系统机侧和电网侧分别控制,其中机侧变流器,通过矢量控制技术提供相位差为30°且对称的两组调制波来控制六相电机在不同环境下运行。变流器根据风能的MPPT算法,得到变流电路的有功电流给定值,实现风力机的最大风能捕获功能。此拓扑结构减小了电路当中电流的谐波含量,风车可以自启动,在切入风速附近,发电机可作电动运行,避免风机停止转动,可以有针对性地提高系统的运行特性。

图1 背靠背双PWM型变流器拓扑结构图Fig.1 Topological structure of the back-toback double PWM converter
3 永磁同步发电机滑模观测器

图2 六相永磁同步发电机数学模型Fig.2 The mathematical model of six phase permanent magnet synchronous generator
双Y移PMSG有6个独立的电流变量,在六相静止坐标系下是一个高阶、非线性、强耦合的系统。为简化数学模型,在磁动势不变和功率不变的原则下,如图2所示,将六相PMSG的数学模型建立在两相静止坐标系α-β和两相旋转坐标系d-q上[3-4],正方向采用电动机原则。两相静止坐标系的α轴与定子的A相绕组重合,β轴逆时针超前α轴90°(空间电角度)。两相旋转坐标系以六相PMSG的转子永磁体磁链轴线作为d轴,超前d轴90°(电角度)为q轴。d轴与A相定子绕组的夹角为θ。
六相永磁同步电机经过6s/2s坐标变换之后在α-β坐标系下的数学模型为
其中:eα=-KEωrsinθ,eβ=KEωrcosθ,KE为反电动势系数。
根据滑模变结构理论[5],选取状态变量为定子电流,构造PMSG的滑模观测器为

滑模变结构饱和函数为
式中:l为控制函数的反馈增益;ωc为低通滤波器截止频率;Δ为边界层,选取时需要根据不同的电机实际测试确定,一般取值为0.5;ksω为滑模系数,此系数的选取必需满足可达性和存在性条件。
由式(2)减式(1)得新型滑模观测器的动态方程如下:

根据滑模控制理论[6],在滑模面上进行滑模运动时,

并将其代入式(3)得:

由于低通滤波器引入了相位延迟。因此,对估算角进行补偿。下式给出了补偿角度:

求得该相移角Δθ后加上就得到准确的转子位置实际角度θ。由θ可得到转子转速:

根据上述理论,可得基于饱和函数的滑模结构观测器结构图如图3所示。

图3 基于饱和函数的滑模观测器框图Fig.3 Block diagram of sliding mode observer based on saturation funtion
本文采用的饱和函数减少低速范围的估计误差,并且在高速范围具有快速收敛性,减少了滑模抖动问题。通过调整与转速相关的反馈增益,选择合适的边界层厚度和反馈值来提高低速时转子位置角的估算精度和系统的稳定性。
4 控制系统的仿真与实验验证
为了满足风力发电系统的要求,实现风能利用中的最大功率点跟踪,本文利用观测器估算的转子位置和速度实现了转子磁场定向的无传感器矢量控制,控制系统框图如图4所示,转速指令经最大功率运算后从风力机模型获得。转子角位置θ实现系统转子磁链磁场定向控制的关键,由新型滑模观测器获得,用于矢量控制中的坐标变换,而观测得到的速度用于转速闭环反馈。对基于滑模观测器的无传感器矢量控制策略进行了仿真与实验研究。
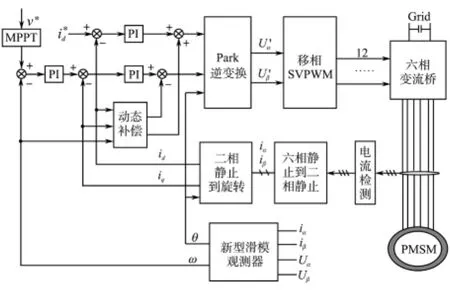
图4 机侧控制系统框图Fig.4 Block diagram of generation-side control system
发电机的转子位置估算仿真结果如图5所示。图5a为滤波延迟,未加补偿的实际角位置与估算角位置的波形;图5b为相角补偿后,实际角位置与估算角位置波形。从图5中看出估算角度和实际角度基本一致。转子速度的估算及误差如图6所示,在0.1s负载扰动时,设计的滑模观测器仍然可以有效地估算转子速度。
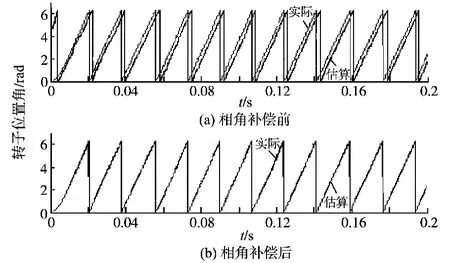
图5 发电机转子位置仿真曲线Fig.5 Simulation curves of generator rotor position
为进一步验证基于滑模观测器控制系统的正确性,进行了转速和电流跟踪的实验研究。直流电动机作为原动机模拟风力机,额定功率为3kW的六相永磁同步发电机。数字信号处理器TMS 320F2812为控制芯片,其快速的指令周期可以满足滑模控制系统运算速度和存储容量的要求。发电机的角位置和速度由滑模观测器估算得到,角位置用于矢量控制解耦运算,速度作为反馈量,实现双闭环控制。
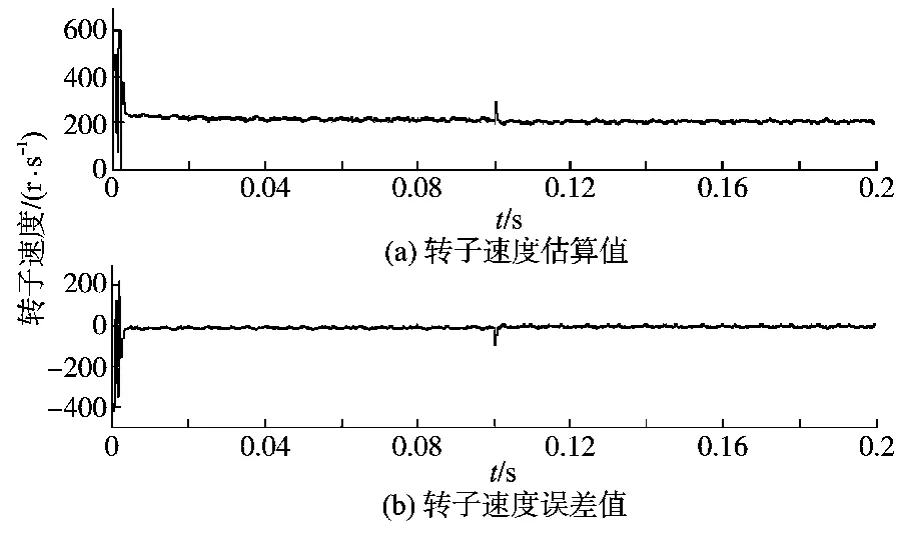
图6 发电机转子速度仿真曲线Fig.6 Simulation curves of generator rotor speed
由图7可见,改变转速指令时,用示波器测量发电机的电压频率曲线,读取电压周期,由n=60f/p计算转速的跟踪。分别给定转速指令82 r/min,180r/min。图7中实验波形得转速的实际值分别为83.3r/min和180.7r/min,跟踪误差分别为1.6%和0.4%。由实验结果可以看出该方法能够在较大的频率范围内准确地估算出转子位置信息,扩大了其在低速领域的无传感器控制。

图7 发电机电压频率实验曲线Fig.7 Experimental curves of generator voltage frequency
图8为直流电机模拟风力机拖动永磁同步发电机时,馈入发电机的电压、电流曲线,线电压Uab与相电流ia相位差为210°,电机处于发电状态。发电机的电流能快速、有效地跟踪风力机提供的功率,满足风力发电的要求。实验结果表明,本文设计的滑模观测器能够实现对转子位置和速度的准确观测。整个控制系统较好地实现了风力发电系统机侧无传感器矢量控制。

图8 发电机Uab,ia的实验波形Fig.8 Experimental curves of Uaband iaof generator
5 结论
采用背靠背PWM变流器作为永磁直驱风力发电系统变流器,可以根据实际需要对电机控制性能进行优化,提高风电系统的效率。本文将滑模变结构控制应用于发电机矢量控制系统中,根据六相永磁同步电机的数学模型,设计了一个滑模变结构控制器,用于估算电机转子位置和速度,通过仿真及实验样机验证了在额定功率下无速度传感器矢量控制策略的有效性,能够在保证滑模变结构鲁棒性本质特点的基础上明显地削弱抖振,实现了无传感器磁场定向控制。系统控制能够实现风力机的最大风能捕获,为研究大功率永磁直驱风电系统的控制奠定了理论基础。
[1] 梁艳,李永东.无传感器永磁同步电机矢量控制系统概述[J].电气传动,2003,33(4):4-9.
[2] 刘金琨,孙富春.滑模变结构控制理论及其算法研究与进展[J].控制理论与应用,2007,24(3):407-418.
[3] 王成元,夏加宽,孙宜标,等.现代电机控制技术[M].北京:机械工业出版社,2008.
[4] 侯立军.多相感应电机变频调速系统的研究[D].西安:西安交通大学,2003.
[5] 王丰尧.滑模变结构控制[M].北京:机械工业出版社,1995.
[6] Li Changheng,Malik Elbuluk.A Sliding Mode Observer for Sensorless Control of Permanent Magnet Synchronous Motors[C]∥Conference Record of IAS Annual Meeting,2001(2):1273-1278.
[7] 叶杭治.风力发电机组的控制技术[M].北京:机械工业出版社,2006.
修改稿日期:2010-11-25
Research on Sensorless Vector Control of Permanent Magnet Direct Drive Wind Power Generator
YI Ying-ping1,LIU Pu2,WU Jin-long3
(1.SchoolofOptical-ElectricalandComputerEngineering,UniversityofShanghaiforScience andTechnology,Shanghai200090,China;2.SchoolofElectricalEngineering,Xi’anJiaotong University,Xi’an710049,Shaanxi,China;3.XJFlexibleTransmissionSystem Corporation,Xuchang461000,Henan,China)
Sensorless control technology is the focus of the research in back-to-back directly driven permanent magnet synchronous generator system.Based on the mathematical model of the double Y shift 30°six phase permanent magnet synchronous generator,a saturated function-based the new sliding mode variable structure observer was designed to estimate the position and speed of rotor.The estimated results were used to realize sensorless vector control of the permanent magnet synchronous generator.Simulation and experimental results show that the design of sliding mode variable structure observer for the disturbance of load has strong robustness,and estimated exact rotor operation in a wider range of frequencies.Through monitor the change of the wind speed to adjust generator speed in order to capture the maximum wind-energy in the generator side system.
PWM converter;permanent magnet synchronous generator(PMSG);sliding mode observer;vector control
TM31
A
国家科技支撑项目(2007BAA12B04)
易映萍(1967-),女,工学硕士,副教授,Email:yyp@usst.edu.cn
2010-08-06
猜你喜欢
防爆电机(2020年4期)2020-12-14
中国惯性技术学报(2019年6期)2019-03-04
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
电测与仪表(2016年8期)2016-04-15
通信电源技术(2016年4期)2016-04-04
铁道科学与工程学报(2015年5期)2015-12-24
电测与仪表(2015年16期)2015-04-12
电测与仪表(2015年19期)2015-04-09
电测与仪表(2014年19期)2014-04-04