基于模糊RBF神经网络的风电机组变桨距控制
2011-04-26 06:03韩旭杉陈翡
电气传动 2011年2期
韩旭杉,陈翡
(1.甘肃省电力公司,甘肃 兰州 730050;2.甘肃兰州供电公司,甘肃 兰州 730050)
风力发电系统中,当风速超过额定值后,桨距角的微小变化都会引起输出功率的大幅波动,因此研究先进的控制算法使其在大型风电机组变桨距控制中达到更高的精度,改善机组的控制性能,是风力发电机组控制领域的主要研究热点之一。文献[1]对基于模糊PID的变桨距控制器进行设计和仿真;文献[2]设计了一个神经网络控制器用来控制变桨距大型风力发电机组,通过Matlab仿真,证明控制效果比采用PID控制器能更有效地减少振荡且能较快地达到稳态。但是简单模糊系统的主要缺点是模糊规则的获取及隶属度函数的确定需要依靠专家经验,缺乏自学习、自适应能力;神经网络具有容错能力强及自学习等优点,却在训练过程中不能很好地利用已有的经验知识,从而增加了训练时间且易陷入非要求的局部值。
基于以上分析,本文将二者优势进行互补,采用模糊神经网络控制策略可自动地产生模糊规则和调整隶属度函数 。
1 风力发电机组的变桨距控制原理
图1描述了风速通过风轮的变化情况,其中,v1为距风力机一定距离的上游风速;v为通过风轮时的实际风速为风轮机较远处的下游风速。根据Euler理论经过推导可以得到风轮能够提供的最大功率:

式中:ρ为空气密度,kg/m3;A为风力机的扫掠面积,A=πR2(m2)。
由贝兹(Betz)气动理论知:

它说明,风力机从自然风中所能索取的能量是有限的,其功率损失部分可以解释为留在尾流中的旋转动能。风力机从自然风能中得到能量的大小程度为风能利用率系数Cp:
式中:P为风力机实际获取的轴功率;v为风速,m/s;Cp为风能利用系数,反映了风轮机利用风能的效率;λ为叶尖速比;β为桨叶节距角。
本文风力机部分的风能利用系数可近似用以下公式表示[3]:

在式(4)基础上可以通过Matlab进行计算得到大致的风轮变桨距的叶尖速比与风能利用系数之间的关系,见图2。
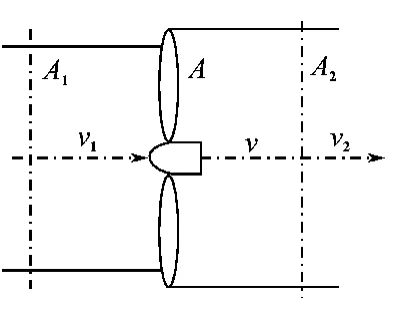
图1 风速通过风轮的变化Fig.1 Wind speed changes through the wind wheel

图2 能量特性曲线Fig.2 Power characteritic curves
由图2得:对于任意的叶尖速比λ,桨叶节距角β=0°下的风能利用系数相对最大。并且随着桨叶节距角β增大,风能利用系数Cp明显减小。因此当风速高于额定风速时,可以通过调节桨叶节距角改变风轮对风能的吸收从而改变发电机的输出功率,降低风轮输入给发电机的能量,使输出功率稳定在额定功率附近。这就是变桨距控制的理论基础。
2 桨距角模糊RBF神经网络控制
2.1 电动变桨控制系统
目前,由于电动伺服结构简单、可靠,并可对单一桨叶进行控制,大多厂家变桨都采用电动变桨方式。该方式是使用异步电机来驱动一个固定在行程推杆上的与球形螺栓相啮合的球形螺母。变桨距行程杆随叶轮旋转,电动机掉电引起球形螺栓调整桨角为顺桨状态,使桨叶处于失效-安全状态。因此在实现中要考虑以下几个方面的部件:
1)带有位移传感器的电机;
2)能够准确知道轮毂转动角度的编码器;
3)连接伺服电机和桨叶轮毂的减速箱以及齿轮;
4)在出现异常现象时能够保证风轮平稳停止的控制器及后备电源。
变桨驱动系统根据变桨主控系统决定叶片角度来精确控制每个叶片的角度位置。每个叶片有单独的驱动系统以保证最大的安全性和效率。电动变桨控制系统结构如图3所示。
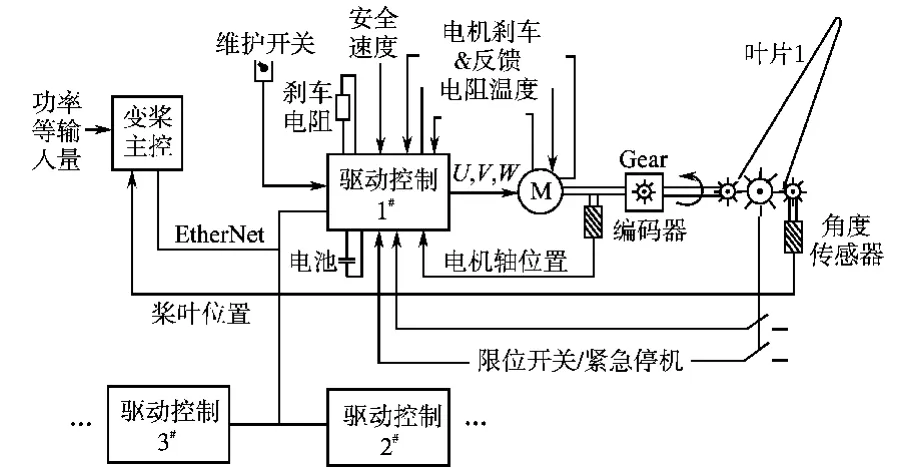
图3 独立型电动变桨控制系统结构Fig.3 Independent electric variable pitch control sy stem
2.2 模糊神经网络的结构
目前风力发电控制算法的研究热点集中在新型智能控制算法上,希望能进一步提高风力机的运行效率,减小疲劳载荷,改善输出电能的质量。本文采用模糊RBF神经网络结构,该网络主要是用神经网络实现模糊映射过程,学习的目标是根据输入-输出训练数据自动地提取控制规则,确定前件和后件参数。
模糊神经网络是在神经网络和模糊逻辑系统的基础上发展起来的,它充分考虑了神经网络和模糊逻辑系统之间的互补性,集学习、联想、识别、自适应及模糊信息处理于一体。例如,对于某些实际问题,人们事先无法确定模糊规则、隶属度函数以及模糊决策算法的最佳方案,而神经网络可以通过对实际输入、输出数据的学习来确定这些规则、函数和决策算法;另一方面,尽管神经网络本身所存储的知识难以理解,但模糊神经网络能够将神经网络的学习结果转化成模糊逻辑系统的规则和知识,从而更加有利于知识的解释和利用[3- 4]。
这里要介绍的模糊RBF神经网络是采用模糊理论与RBF(radial basic function径向基函数)神经网络串联结合而成的,选择RBF神经网络是因为它的逼近能力、分类能力和学习速度等均优于BP神经网络。首先,对神经网络的输入样本进行模糊化。该模糊化是利用高斯隶属度函数来实现的。然后,神经网络部分采用的是RBF神经网络。同样将上述输入样本模糊化之后的量作为RBF神经网络的输入,这样就构成了一个模糊RBF神经网络,该网络的结构如图4所示。

图4 模糊RBF神经网络结构Fig.4 Structure of fuzzy RBF neural netwo rk
模糊RBF神经网络为4层网络结构。
第1层为输入层:起着将输入值传送到下一层的作用。该层每个节点代表经过预处理过的输入变量x=,根据变桨距问题本身将该层节点数设置为m=2,即x=[EEC]T,采用功率误差E=P-Pref及功率误差变化率EC为输入变量,预处理过程是指将这两个连续变化量转化为(-6,6)之间的连续变化量。
第3层为模糊推理层:该层对应于RBF网络的隐含层,在该模糊神经网络系统中各级模糊算子的隶属度函数均取为高斯隶属度函数,其表达式为

式中:ci为高斯隶属度函数的中心值;σi为高斯隶属度函数的宽度。
对于初始参数,各个模糊论域的宽度都选择2,中心值选为各宽度的中点。隐含层,又称为模糊推理层,共包含7×7=49个神经元。
第4层为输出层:Y=[,…,],该层由n个节点构成,其计算公式为

式中:p为隐层单元数为49是隐层第i个神经元至输出层第j个神经元的连接权值;本文j=1是输入向量经过模糊化以后又被径向基函数(高斯基函数)作用以后得到的向量,该向量由输出的第i个语言隶属函数的中心值组成。
该层用于实现清晰化计算,将模糊规则推理得到的输出变量的各个模糊集合的隶属度值转换为输出变量桨距角的精确数值。
该模糊RBF神经网络控制器的学习方法采用有教师信号的误差反向传播学习算法,

将式(7)作为学习目标来修正网络的可调参数。
2.3 训练网络
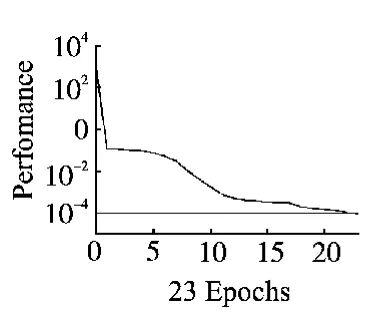
图5 训练过程误差曲线Fig.5 Error curves of the training process
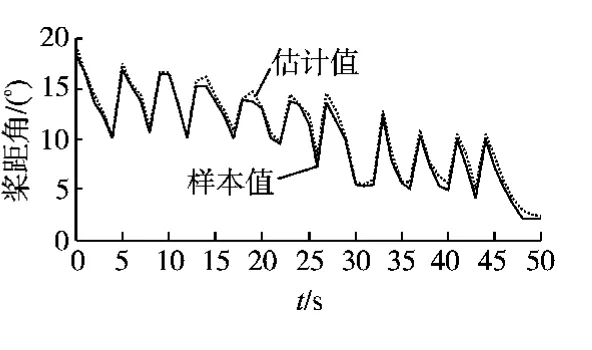
图6 测试样本误差Fig.6 Error curves of the test
在进行学习前,必须提供输入输出训练数据对、隶属函数形状、输入数据的模糊论域个数。再利用神经网络的有效学习算法,从这些数据中学习控制规则和隶属函数。
运用Matlab语言实现网络并进行训练,通过120组值作为训练样本,当网络达到误差精度要求时,结束训练过程。每次训练的迭代次数取1000次,训练结束MSE为8.60653e-005,训练过程误差曲线如图5所示,训练误差在允许误差范围内。再通过50组数据作为测试样本,测试结果如图6所示,结果说明模糊RBF神经网络模型可以比较准确地描述输入与输出之间的映射关系,具有较好的容错能力和学习能力,能补偿风机固有的非线性和整个系统的不可预测性。
3 变桨距功率控制仿真
通过图7的变桨距控制原理建立机组各部分的模型。风速在额定值以上通过桨距角的调节保证风力机在额定功率发电[57]。

图7 风力机变桨距控制Simulink图Fig.7 Simulation block diag ram of pitch angle control using Matlab/Simulink
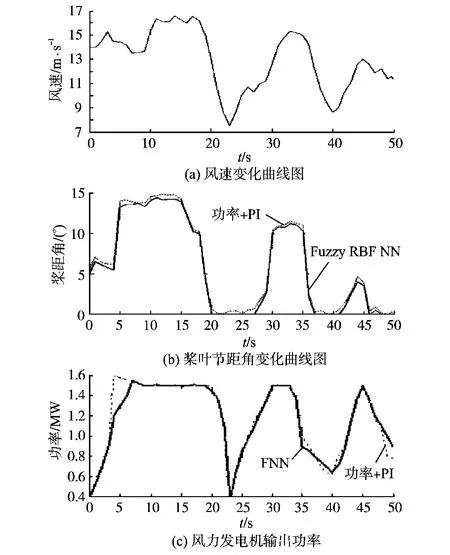
图8 仿真对比结果Fig.8 Comparison of simulation results
在均采用1s平均风速条件下[8],采用PI控制器与本文提出的模糊神经网络控制器作为对比仿真,结果如图8所示。
由仿真结果可知,本文设计的模糊RBF神经网络系统在风速高于额定值时,通过调节桨叶节距角的变化使功率保持在额定值附近且具有较小的波动,比同种状态下采用PI控制器的控制效果要好,非常适用于时变的、非线性的风力发电系统的控制。
4 结论
本文利用基于模糊神经网络的人工智能方法在额定风速以上的工况下,设计并验证了一种适用于风电系统的模糊神经网络控制器。该控制器基于实时数据进行计算,能够不断优化其内部参数使系统可以克服非线性及时变性,满足了系统的动态特性和稳态性能。模糊RBF神经网络控制策略不但具有一般模糊控制的优点,而且具有神经网络的自学习能力。仿真结果表明了提出方法的有效性,模糊神经网络控制器的控制效果比采用功率的PI控制方法更适用于当今的风力发电变桨距系统。
[1] 盛旺.直驱风力发电模糊 PID变桨距控制[J].制造业自动化,2008,30(10):100-103.
[2] Kyoung soo Ro,Han-ho Cboi.Application of Neural Network Controller for Maximum Power Extraction of a Gridconnected Wind Turbine System[J].Eleetrical Engineering,2005,88(1):45-53.
[3] 曾光奇,胡均安,王东,等.模糊控制理论与工程应用[M].武汉:华中科技大学出版社,2006.
[4] 伦淑娴,张化光,冯健.自适应模糊神经网络系统在管道泄漏检测中的应用[J].石油学报,2004,25(4):101-104.
[5] 李颖,朱伯立,张威.SIM ULINK动态系统建模与仿真基础[M].西安:西安电子科技大学出版社,2004.
[6] 张新房.大型风力发电机组的智能控制研究[D].保定:华北电力大学,2004.
[7] 董萍.风力发电系统的建模、控制及其仿真研究[D].广州:华南理工大学,2004.
[8] 张建中.定子永磁电机及其风力发电应用研究[D].南京:东南大学,2008.
修改稿日期:2010-09-28
猜你喜欢
通信电源技术(2020年17期)2020-12-28
哈尔滨轴承(2020年1期)2020-11-03
太阳能(2019年10期)2019-10-29
中医眼耳鼻喉杂志(2019年2期)2019-04-13
测控技术(2018年5期)2018-12-09
通信电源技术(2016年1期)2016-04-16
振动工程学报(2015年1期)2015-03-01
太阳能(2015年6期)2015-02-28
电气传动自动化(2014年6期)2014-03-20
振动、测试与诊断(2014年5期)2014-03-01