新型异步电动机滑模变结构速度观测器的研究
2011-04-26 06:03李国华王继强
电气传动 2011年2期
李国华,王继强
(辽宁工程技术大学 电气与控制工程学院,辽宁 葫芦岛 125105)
1 引言
1983年,R.Joetten首次在矢量控制系统中用速度观测器取代传统的速度传感器,在简化系统结构、降低成本的同时,还有效解决了传统速度传感器的可靠性差、鲁棒性低等缺陷。目前,无速度传感器技术已经成为交流调速领域研究的热点之一,交流电动机无速度传感器矢量控制技术已经在各种工业场合得到广泛应用[1- 2]。交流异步电动机转速观测方法主要有直接计算法、模型参考自适应法(MRAS)、观测器法、转子齿谐波法、扩展卡尔曼滤波法、高频注入法和智能控制法等。直接计算法模型中没有任何的误差计算环节,电机磁链观测的误差和参数的变化都会对速度的计算结果产生影响,抗干扰能力差;模型参考自适应法具有渐进稳定性和鲁棒性强等特点,但计算程序较复杂,且低速运行时速度观测不准确;扩展卡尔曼滤波法计算量较大,精度易受到电机参数变化的影响;智能控制法的基本理论及应用技术目前尚不成熟,难以用硬件实现,实用性不强[3]。
近年来,电机滑模变结构控制技术发展迅速,并取得一定的进步[4- 6]。文献[5]利用滑模变结构控制理论设计了一种异步电动机速度的观测器,并取得了较好的观测效果。但其观测器中的转子磁链观测器为电流模型,容易受转子时间常数的影响,只适用于低速场合。本文利用滑模变结构控制技术提出了一种新型异步电动机速度观测方案,根据定子电流计算值与实际值的偏差计算转速信号,具有结构简单、响应速度快、稳态精度高和鲁棒性强等优点。观测器中转子磁链观测部分采用改进的电压模型,在保持电压模型不易受转子参数影响等优点的基础上,有效解决了其固有的直流偏置误差和初始值积分误差问题。
2 异步电动机的数学模型
在两相静止坐标系下,异步电机转子磁链的电压模型、转子磁链的电流模型和定子电流计算模型方程如下[3]:

式中:σ为电机漏磁系数;Tr为电机转子时间常数;分别为两相静止坐标系下磁链、电压、电流的d,q轴分量分别为电机定子、转子电感和互感。
3 滑模变结构速度观测器
3.1 滑模控制器的设计
滑模控制具有响应速度快、对参数变化及扰动不灵敏、无需系统在线辨识、实现简单等优点,建立滑模变结构系统的关键在于根据控制指标和要求,选取不同的调节器进行切换,以便在每一控制过程和控制时段最大限度地利用每一调节器结构的良好性能[7]。异步电动机是一个高阶的、非线性的、强耦合的多变量复杂系统,滑模变结构控制自身的非线性及其高速切换特性,特别适用于像异步感应电机这种复杂对象的控制[6]。
如图1所示,本文利用滑模变结构控制理论建立了异步电动机速度观测器,模型中主要分为转子磁链观测模型、定子电流计算模型和滑模控制器3部分,该观测器输入量是电机运行中的实际定子电压值和定子电流值,输出量是电机转速的观测值。其中,滑模控制器的数学模型为

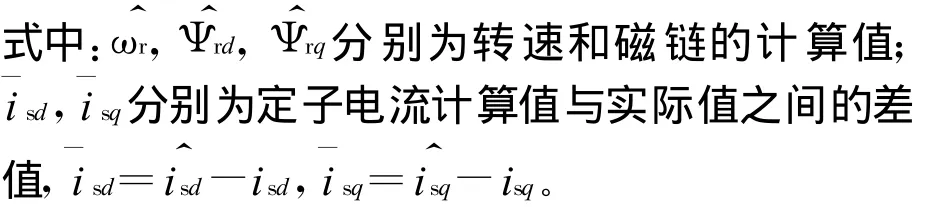
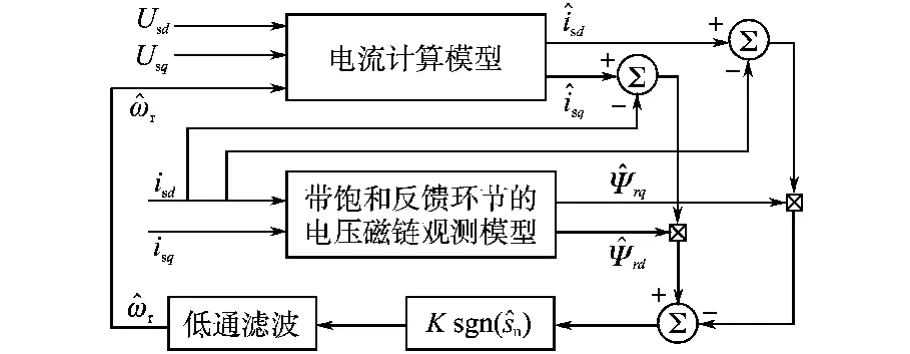
图1 滑模变结构速度观测器框图Fig.1 Block diagram of sliding mode speed observer
滑模控制器的输入量为定子电流的计算值、实际值和转子磁链的计算值,并根据定子电流的偏差由式(7)、式(8)来确定滑模平面和滑模控制律,使系统的状态最终稳定在设计好的滑模超平面上,最终实现电机速度的准确计算。文献[4-5]证明了当K值足够大的时候观测器的电流和转子磁链具有稳定性;并指出K值越大,则计算转速的抖动会越大,但同时会提高系统的收敛速度;因此,该滑模控制器在式(8)的基础上增加了一个PI调节器,使得K可以根据计算速度的变化而自动调节,增加了在整个调速范围的稳定性,并有效抑制了高频抖动的现象。滑模控制器输出值的最终表达式为式(9),在Matlab/Simulink环境下的仿真模型如图2所示。
3.2 转子磁链观测
转子磁链观测的精确度直接影响速度观测的最终结果。目前,常用的转子磁链观测模型有电流模型和电压模型两种,电流模型受转子时间常数和转速精度的影响较大[3],特别是在无速度传感器的电机控制系统中,由于速度信号是估算值,当速度计算不准确时也会影响电流模型的观测精度,因此电流模型多用于低速场合。电压模型具有结构简单、不含转子电阻和受电机参数变化影响小等优点,尤其是电压模型不需要转速信息,对于无速度传感器的电机控制系统颇具吸引力。但电压模型本质上是一个积分环节,存在直流偏置误差和初始值积分误差两个问题。为解决上述问题,可以将电压模型的输出端增加一个高通滤波器,相当于将电压模型的纯积分环节替换为一阶低通滤波环节,实践证明该方法可以消除积分初始值引起的误差,但却无法解决输入直流偏置问题,而且还会增加输出波形的幅值和相角误差。
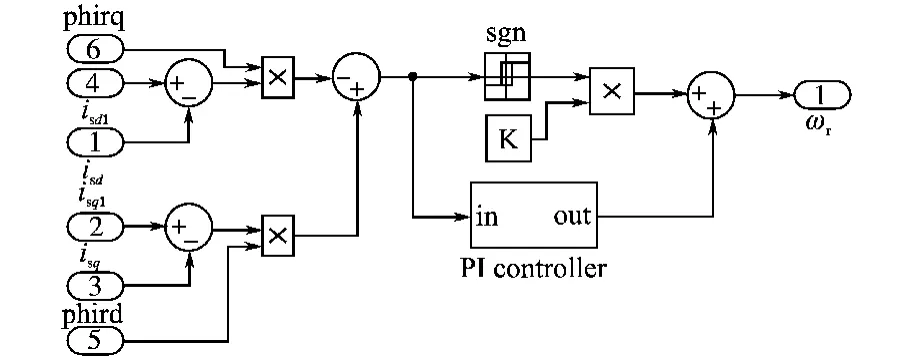
图2 滑模控制器的仿真模型Fig.2 Simulation model of sliding mode controller
如图3所示,本文采用一种带饱和反馈环节积分器的电压磁链观测模型[1],数学模型为
式中:Ψcmp为 Ψr经过限幅之后的值;L为限幅值(磁链的参考值)。

图3 改进的电压磁链观测模型Fig.3 M odified voltage flux observer model
该模型的作用介于纯积分器和低通滤波器之间,当电机磁链小于积分器的限幅值即不含有直流偏移量时,Ψcmp=Ψr,模型等效于纯积分器;当电机磁链大于积分器的限幅值即存在直流偏差时,Ψcmp=L,模型等效于一阶低通滤波器,此时饱和反馈环节可以通过限幅补偿环节限制直流偏移,而且偏移越大反馈环节的补偿作用就越强。该磁链观测模型在保持电压模型固有的结构简单的同时,有效解决了电压模型固有的直流偏置误差和初始值积分误差问题,并对磁链观测误差具有补偿作用,较适合磁链幅值保持不变的应用场合。
4 仿真结果
为验证本文设计的滑模变结构速度观测器的性能,在Matlab/Simulink仿真环境下建立异步电动机无速度传感器的矢量控制系统,分别在电机的给定速度变化、负载突变和转子电阻变化3种情况下对该方案进行验证。系统的参数为:Rs=0.92 Ω,Rr=0.73 Ω,Ls=0.083 H,Lr=0.083 H,=0.079 H;转子磁链给定值为0.75 Wb,转速给定值ω*r为:在0~1 s内 ωr*的给定值由0 rad/s升高至额定转速150 rad/s,之后保持不变;负载转矩给定值为:0~2 s内空载,2 s时突加负载至10N◦m,3 s时突减负载至5 N◦m;4 s时,将电动机的转子电阻Rr升高至1.5倍。仿真波形如图4~图8所示。
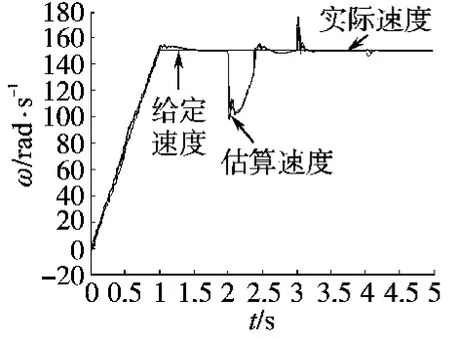
图4 转速波形图Fig.4 Speed waveforms
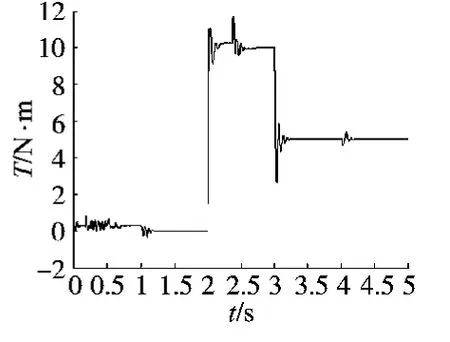
图5 转矩波形图Fig.5 Torque waveform
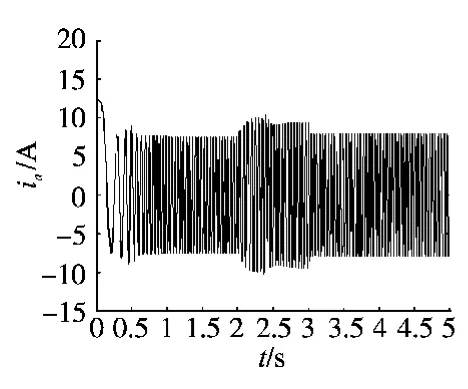
图6 定子电流波形图Fig.6 Stator current waveform

图7 转子磁链波形Fig.7 Rotor flux waveforms

图8 定子电流偏差值波形Fig.8 Deviation of the stator currentwaveform
通过图4~图8的波形可见,估算转速的波形在低速和高速范围内与电动机的实际转速波形基本相同,在负载突变的情况下,电机的转速和电磁转矩有一定波动,但很快恢复至给定值,转子电阻的变化对转速和转矩的影响不大;由图7可见,本文采用的带饱和反馈环节积分器的电压转子磁链观测模型能够准确地观测转子磁链值。
5 结论
本文利用滑模变结构控制理论提出了一种新型异步电动机速度观测器,其中转子磁链的观测采用带饱和反馈环节积分器的电压型转子磁链观测模型,有效解决了直流偏置误差和初始值积分误差的问题。仿真结果证明该速度观测器具有响应速度快、稳态精度高和鲁棒性强的特点。
[1] Yu Yong,Song Hailong,Xu Dianguo.Research on Speed Sensorless Vector Control of Induction Moto r Based on Stator Flux Orientation[J].IEEE 33rd Annual Power Electronics Specialists Conference,2002,2(2):875-880.
[2] Hu J,Wu B.New Integ ration Algorithms for Estimating Motor Flux Over a Wide Speed Range[J].IEEE T rans.on Power Electronics,1998,13(5):969-977.
[3] 赵争鸣,袁立强.电力电子与电机系统集成分析基础[M].北京:机械工业出版社,2009.
[4] Je hu diM aes,Jan Melkebeek.Speed Sensorless Direct Torque Control of Induction Motors Using an Adaptive Flux Observer[J].IEEE T ransactionson Industry Application,2000,36(3):778-785.
[5] 路强,沈传文,季晓隆,等.一种用于感应电机控制的新型滑模速度观测器研究[J].中国电机工程学报,2006,26(18):164-168.
[6] 王丰尧.滑模变结构控制[M].北京:机械工业出版社,1995.
[7] 刘金锟.滑模变结构控制M atlab仿真[M].北京:清华大学出版社,2005.
[8] 王高林,陈伟,杨荣峰,等.无速度传感器感应电机改进转子磁链观测器[J].电机与控制学报,2009,13(5):638-642.
修改稿日期:2010-09-10
猜你喜欢
防爆电机(2020年4期)2020-12-14
中国惯性技术学报(2019年6期)2019-03-04
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
电测与仪表(2016年10期)2016-04-12
铁道科学与工程学报(2015年5期)2015-12-24
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
电测与仪表(2015年19期)2015-04-09
电测与仪表(2014年23期)2014-04-04
电测与仪表(2014年11期)2014-04-04