SINS/GPS/TACAN机载综合导航定位系统设计
2011-03-08 02:27:42王永胜
电讯技术 2011年4期
马 霞,王永胜
(1.中国西南电子技术研究所,成都 610036;2.北京市9236信箱,北京 100036)
1 引 言
捷联惯性导航系统(SINS)是利用惯性元件在载体内部感测运载体的运动加速度,通过积分运算,从而求出导航参数以确定载体速度、位置、姿态等导航信息。SINS由加速度计和陀螺仪构成,其缺点是陀螺仪存在着漂移误差,致使定位精度随时间不断降低,以导航时间2 h计算,在1 h内导航误差约为0.8 nmile,2 h以上时导航误差约为2 nmile。GPS系统具有高精度的定位及授时能力,能够全天候、连续实时地提供高精度的三维速度和位置信息,且其定位能力误差不会随着时间的推移而发散。但GPS也有弱点,如飞机做高机动时定位不准,数据率低(约1 Hz)等。塔康(TACAN)[1]是一种无线电导航系统,具有近程导航定位精度高特点。本文研究了SINS/GNSS/TACAN机载综合导航定位算法,利用各导航定位子系统提供定位信息,采用广义联邦滤波技术完成信息融合。仿真实验表明,该系统具有较高定位精度。
2 广义联邦滤波器信息融合设计
根据联邦滤波器设计特点[2],本文根据SINS、GPS和TACAN 3种导航源特点设计出了如图1所示的机载综合导航原理框图。

图1 机载综合导航设计原理框图Fig.1 Schematic block diagram of airborne integrated navigation system
共同参考系统选用SINS系统,SINS输出一方面给主滤波器,另一方面输出给各子滤波器。在子滤波器1中完成SINS和GPS局部滤波,并把滤波局部估计值 X1(k)及其协方差P1(k)给主滤波器;在子滤波器2中完成SINS和TACAN局部滤波,并把滤波局部估计值 X2(k)及其协方差P2(k)给主滤波器;在主滤波器中完成子滤波器与主滤波器估计值进行全局最优估计,进行子滤波器的公共状态矢量融合和时间更新,输出可靠、准确的导航参数误差的全局最优估计量。根据分散化全局滤波公式[3],得到全局最优估计为


根据联邦滤波器信息分配策略不同,本文选用有重置联邦滤波器结构。重置中把由子滤波器与主滤波器合成的全局估计值 X(k)及其相应的协方差阵 P(k)再反馈回到子滤波器(图1中子滤波器和主滤波器之间选用双向箭头),以重置子滤波器的估计,即:
式中,βi(i=1,2)称为“信息分配因子”。FLAC(模糊逻辑自适应控制器)用来在线实时估计加权因子α(k),增强滤波的鲁棒性。

图1中机载综合导航系统对子导航源SINS实施闭环负反馈校正,实现动态校正(比力方程积分初始条件重新设置)、动态对准(姿态矩阵微分方程积分初始条件重新设置)和动态标定(陀螺和加速度计随机误差补偿)的目的,提高导航系统性能。
3 坐标系的定义及坐标转换
对于SINS,观测量来源于惯性加速度计及陀螺仪。加速度计给出比力向量fi在载体坐标系(b)三轴上的分量;后者观测的是载体坐标系相对于惯性坐标系旋转角速度向量在b系三轴上的3个分量。
GPS观测量一般是在地心直角坐标系中的值。TACAN观测量是目标飞机相对于塔康信标台的斜距和反方位角。
针对图1中子滤波器1中状态方程和观测方程都选用地心直角坐标系,则SINS需要一系列坐标转换,即从载体坐标系(b)到地心直角坐标系(e)坐标转换,有关坐标转换公式见文献[4]。
子滤波器2中状态坐标系选用直角坐标系,而观测方程中输入量选择大地线长度、飞机方位角和飞机气压高度。
利用塔康的信标位置及塔康设备测得的飞机相对于塔康地面台的斜距、反方位角和飞机实测气压高度求飞机大地线长度和方位角。

式中,R为塔康所在地地球半径,D为飞机到塔康的斜距,H表示飞机大地线高度,h表示塔康信标台高度。
利用塔康的信标位置及捷联惯性导航提供载体位置,求出飞机大地线长度和方位角。具体坐标系转换见文献[5]。
4 SINS/GNSS/TACAN机载综合导航定位算法
系统滤波采用卡尔曼滤波平方根分解算法[6,7],通过对惯性导航系统误差传递和误差分析[2],可以建立加速度计和陀螺仪误差源误差状态空间模型,得到系统连续状态方程,经过离散化后再应用于卡尔曼滤波方程中。
4.1 主滤波器
主滤波器接收惯性导航数据输出,惯性导航系统状态方程为其中,取滤波器惯性系统状态向量为


式中,δXSINS、δYSINS、δZSINS为载机的位置误差,δVXSINS、δVYSINS、δVZSINS为载机的速 度误差,φx、φy、φz为载机的姿态角误差 ,δfax、δfay、δfaz为载机的加速度误差,δVθx、δVθy、δVθz为载机的姿态角速度误差。其中FSINS为连续系统状态转移矩阵,GSINS为系统噪声矩阵,WSINS为系统噪声,FSINS=

μ为地球引力常数,即 μ=3.986005×1014m3/s2;
为比力矢量的反对称阵;
F4=A-C-be;F6=-A-C-be其中A-C-be表示从载体坐标系b到地心直角坐标系e变换矩阵[4];


g-a-m、b-m分别为加速度计和陀螺仪常数误差。
4.2 局部滤波器1
GPS/SINS子滤波器采用位置和速度进行组合方式,卡尔曼滤波的量测量为惯性导航SINS的相应输出信息与GPS导航信息相减,得到测量输入值:

则GPS/SINS子滤波器的状态方程为式(4),量测方程为

4.3 局部滤波器2
SINS/TACAN子滤波器采用大地基线长、载飞到塔康方位角和载机的大气高度进行组合方式。根据图2中球面三角形N1P1P2可以得到大地线长和大地线方位角误差模型。惯性导航SINS的相应输出信息与TACAN导航信息相减,得到测量输入值:

式中,SSINS为 SINS计算出大地线长度,STACAN为TACAN计算出大地线长度,αSINS为SINS计算出大地线方位,αTACAN为TACAN计算出大地线方位。
量测方程为
α为捷联惯导提供大地线反方位角度,B和L为捷联惯导提供飞机的纬度和经度。
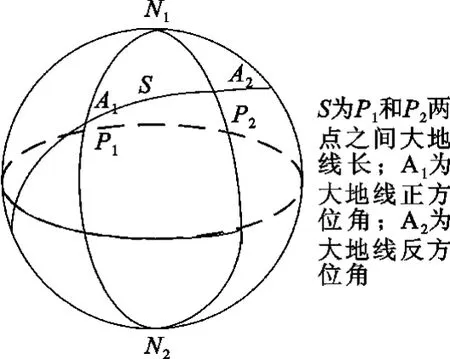
图2 大地线示意图Fig.2 Illustration of geodesic line
4.4 SINS/GNSS/TACAN机载综合滤波算法
对式(4)进行离散化后得到卡尔曼滤波系统状态方程为

卡尔曼滤波系统观测方程为

组合导航融合算法则采用式(1)和式(2)。
融合规则如下:
(1)假设SINS数据一直有效,即SINS设备一直工作;
(2)当GPS数据有效、TACAN有效时,选用三者组合导航滤波算法,即规则(1)、(2)。
(3)当GPS数据有效、TACAN无效时,则局部滤波器1作为全局输出;
(4)当GPS数据无效、TACAN有效时,则局部滤波器2作为全局输出;
(5)当GPS数据无效、TACAN无效时,则SINS的滤波输出结果作为全局输出。
5 仿真研究与结果分析
仿真条件为:SINS数据输出率为50 Hz,加速度计常值偏置误差在载机坐标系三维上分别为0.00436、0.00258、0.0009;陀螺常值偏置误差在 3个姿态 上误差 分别为 0.063288°/h、0.01489°/h、0.07588°/h;GPS数据输出率为1 Hz,在地心坐标系下常值误差分别为2 m、-11 m、-6 m,相关的随机误差分别为5 m、33.1266 m、17 m;TACAN数据输出率为1 Hz,TACAN地面台的经度为108.8549°,纬度为34.1099°,高度为140 m,从飞机到塔康地面台的斜距偏置误差为36 m,反方位角偏置误差为0.95°;仿真中主滤波器滤波周期为6 s,每隔6 s进行一次闭环反馈矫正。
仿真结果见图3。从图3中看出,系统运行了1 h 25 min,SINS/GNSS/TACAN机载综合后导航有效地抑制了惯导误差随时间累积,同时定位精度也得到了很大提高,在地心直角坐标中三维上误差分别为3.3680 m、25.5134 m、5.6288 m,CEP 误差为26.3431 m,满足导航定位精度要求。

图3 系统运行1 h 25 min载机轨迹和误差图Fig.3 Airborne trace and error figure duringrunning system for 1 hour 25 minutes
6 结 论
将GPS和TANCAN作为SINS误差校准参考源,在1s、2s、3s、4s、5s时采用 SINS/TANCAN 子滤波器结果校准SINS误差,在主滤波器滤波周期即6 s时,选用三者(SINS/GNSS/TACAN)综合导航滤波结果校准SINS误差。仿真结果表明,此系统能有效地校准惯导漂移误差,使惯性导航误差控制在一定误差范围之内,满足了定位误差要求。在实际战场环境中,GPS、TACAN某些时候受到干扰不可用,由于系统采用了联邦滤波器,可以很好隔离不可用导航源,使得系统具有更好的容错性和抗干扰性。
[1]张忠兴,李晓明,张景伟,等.无线电导航理论与系统[M].西安:陕西科学技术出版社,1998:1-8.ZHANG Zhong-xing,LI Xiao-min,ZHANG Jing-wei,et al.Radio Short-range NavigationTheory andSystem[M].Xi′an:Shaanxi Science and Technology Press,1998.(in Chinese)
[2]张国良,曾静.组合导航原理与技术[M].西安:西安交通大学出版社,2008:134-136.ZHANG Guo-liang,ZENG Jing.The principle and Technology of Integrated Naiagation[M].Xi′an:Xi′an Jiaotong Universityvi Press,2008:134-136.(in Chinese)
[3]顾启泰,王颂.联邦滤波器的最优性[J].清华大学报告(自然科学版),2003,43(11):1460-1463.GU Qi-tai,WANG Song.Optimized federated filter[J].Jowrnarl of Tsinghua University(Science&Technology Edition),2003,43(11):1460-1463.(in Chinese)
[4]左安元,刘刚.一种机载定位坐标转换方法误差分析及仿真[J].电讯技术,2006,46(6):58-62.ZUO An-yuan,LIU Gang.Error Analysis andSimulation of a Coordinate Conversion Scheme for Airborne Position[J].Telecommunication Engineering,2006,46(6):58-62.(in Chinese)
[5]吕晓华,杨国平.大型GIS中方位距离的量算方法[J].测绘学院学报,2004,21(2):138-140.LU Xiao-hua,YANG Guo-ping.Algorithms of the Measurements of Azimuth and Distance in Large Area GIS[J].Journal of GeomaticsScience and Technology,2004,21(2):138-140.(in Chinese)
[6]Carlson N A.Federated Square Root Filter for Decentralized Parrallel Processes[J].IEEE Transactions on Aerospace and Electronic Systems,1990,AES-26(3):517-525.
[7]张树春,胡广大.平方根滤波及其在目标跟踪方面的应用[J].哈尔滨工业大学学报,2008,40(5):700-704.ZHANG Shu-chun,HU Guang-da.Square-root filtering and its applicationsin target tracking[J].Journal of Harbin Institute of T echnology,2008,40(5):700-704.(in Chinese)
猜你喜欢
航天电子对抗(2022年4期)2022-10-24 13:38:28
南京航空航天大学学报(2022年2期)2022-04-27 01:45:38
中国特种设备安全(2021年5期)2021-11-06 05:09:08
卷宗(2021年2期)2021-03-09 07:57:24
空间科学学报(2020年4期)2020-04-22 01:17:04
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
光学精密工程(2016年5期)2016-11-07 09:06:41
火控雷达技术(2016年2期)2016-02-06 02:29:04
河南科技(2015年18期)2015-11-25 08:50:14
导航定位与授时(2014年2期)2014-04-27 13:41:11