
锅炉汽包水位的仿人逻辑控制策略
2011-03-07 06:20张永生马运义
舰船科学技术 2011年4期
张永生,马运义
(中国舰船研究设计中心,湖北武汉 430064)
0 引言
锅炉汽包的水位必须控制在合理的范围内,水位过高会导致蒸汽带水进入过热器,容易在过热管内结垢,影响传热效率,严重时会导致过热管因局部过热而破裂;水位过低则会破坏水冷壁的水循环,导致水冷壁因局部过热而破裂。传统的串级三冲量PID控制,由于将蒸汽流量信号作为前馈信号引入,使得给水调节阀动作及时,在一定程度上减少了锅炉汽包所特有的“虚假水位”现象的影响,改善了控制系统的控制效果[1-3]。但是,由于锅炉汽包水位具有多变量、大滞后、强耦合等非线性特点,采用基于经典控制理论的串级三冲量PID控制策略,已不能满足越来越高的控制要求。而模糊控制对解决这类非线性问题特别有效,它不需要知道被控对象的精确数学模型,只需要积累对设备进行控制的操作经验,对过程参数的变化也不敏感,具有很强的鲁棒性[3-10]。虽然模糊控制系统具有良好的动态性能,但其稳态性能较差。
本文结合串级三冲量PID控制与模糊控制各自的优点,提出了一种锅炉汽包水位的仿人逻辑控制策略,并对锅炉正常升负荷工况与突然甩负荷工况进行了仿真计算。
1 数学模型
锅炉汽包给水系统如图1所示。图中,Gs为蒸汽流量,Gfw为给水流量,L为汽包水位。锅炉汽包水位的扰动主要有被调节量Gfw以及外部干扰Gs。若仅从质量平衡的角度看,蒸汽流量Gs与给水流量Gfw对水位L的传递函数近似于1个积分环节,但由于“虚假水位”现象的存在,汽包水位还表现出“逆动力学”特性。以某型锅炉为研究对象,锅炉汽包水位在给水流量与蒸汽流量作用下的传递函数分别为:


图1 锅炉汽包给水系统Fig.1The Sketch map of boiler drum feedwater system
2 控制策略
随着锅炉汽包水位控制指标的提高,串级三冲量控制已不能满足越来越高的控制要求。因此,模糊控制便因其良好的动态控制性能成为研究的焦点。但模糊控制本身存在难以克服的缺陷,即稳态性能较差。本文在分析对比串级三冲量控制与模糊控制优缺点的基础上,提出了锅炉汽包水位的仿人逻辑控制策略。
2.1 串级三冲量水位控制
图2为串级三冲量水位控制原理。其中,主控制器为PID水位调节器,副控制器为PI给水流量调节器;L0为水位设定值;L为水位测量值;Qs为蒸汽流量;Qfw为给水流量;α1,α2,α3分别为蒸汽流量传感器、给水流量传感器以及水位传感器。串级三冲量控制是通过引入蒸汽流量信号作为前馈信号,使得给水流量调节器能及时动作,使给水流量与蒸汽流量相匹配。因此,这种控制方式能减少水位的波动,在一定程度上降低“虚假水位”的影响。
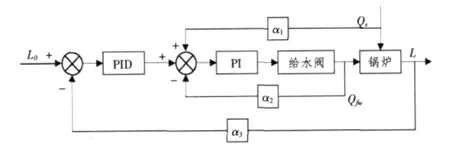
图2 串级三冲量水位控制原理Fig.2Three-element controlling principle of water level
2.2 模糊逻辑水位控制
图3为模糊逻辑水位控制原理。其中,水位调节器以模糊控制器代替串级三冲量控制中的PID控制器,其他部分不变。模糊控制器的输入为水位的误差E以及误差变化率EC,输出为空置量U,即为阀门开度信号。模糊控制是一种建立在模糊推理基础上的非线性控制策略,通过模糊语言表达人们的操作经验和推理规则。因此,模糊控制特别适用于锅炉类非线性系统,能获得良好的动态控制性能。

图3 模糊逻辑水位控制原理Fig.3Fuzzy logic controlling principle of water level
2.3 仿人逻辑水位控制
图4为仿人逻辑水位控制原理。其中,主控制器为仿人逻辑控制器,由PID水位控制器和模糊水位控制器2个通道构成,控制逻辑开关根据水位误差信号绝对值的大小,选择使用PID水位控制器还是模糊水位控制器。而且,任意时刻只有1个控制器处于工作状态。逻辑开关阀值的确定,要根据实际情况确定。仿人逻辑控制器的控制策略为:当误差超过阀值时,选择串级三冲量水位控制器;当误差小于等于阀值时,选择模糊水位控制器。
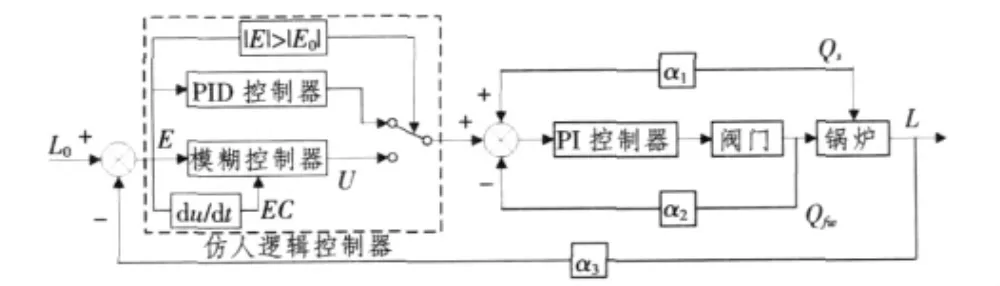
图4 仿人逻辑水位控制原理Fig.4Apery logic controlling principle of water level
3 结果分析
为验证上述仿人逻辑水位控制策略的有效性,运用Matlab/Simulink软件实现了锅炉汽包的水位控制模型,并设计了汽包水位的串级三冲量PID控制器、模糊逻辑水位控制器以及仿人逻辑水位控制器。然后,对正常升负荷工况(锅炉负荷变化:80%~100%)与突然甩负荷工况(锅炉负荷变化:100%~20%)进行了仿真计算。图5和图6中纵坐标的数据作了无量纲化处理,是额定值与实际值的比值。
图5为正常升负荷工况下,锅炉汽包水位的动态变化趋势。可以看出,在蒸汽负荷变化幅度不大的情况下,模糊控制与仿人逻辑控制的控制效果是一样的。与串级三冲量PID控制相比,模糊控制与仿人逻辑控制均减少了水位的超调量,缩短了调节时间,提高了水位控制系统的动态性能。
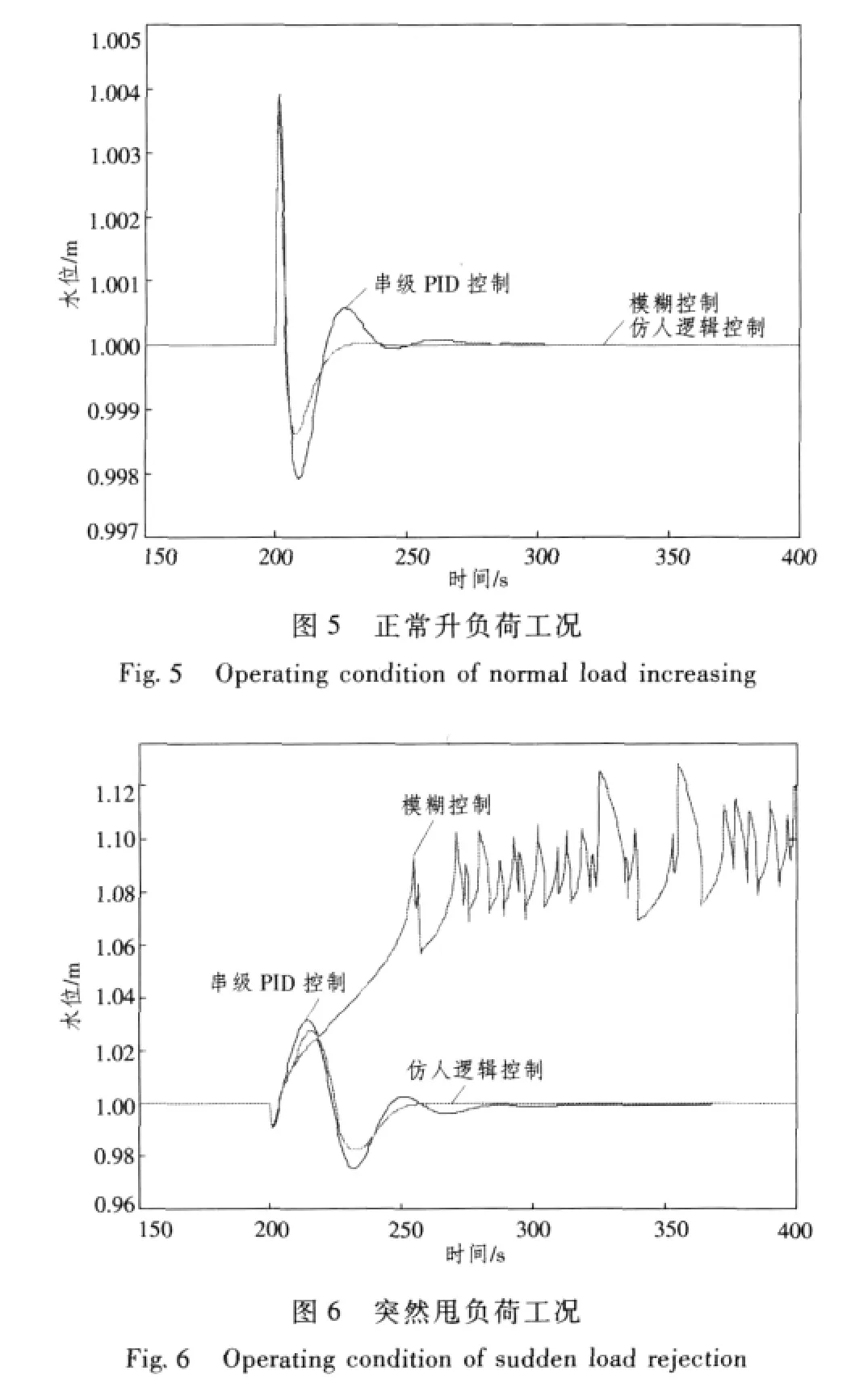
图6为突然甩负荷工况下,锅炉汽包水位的动态变化趋势。可以看出,在蒸汽负荷变化幅度较大的情况下,模糊控制器的输出使得水位偏离了设定值,这恰恰说明了模糊控制系统稳定性差的致命缺陷。一旦模糊控制器的模糊推理系统出错,模糊控制器便无法正常工作。然而,结合了串级三冲量PID控制与模糊逻辑控制优点的仿人逻辑控制器,仍然能很好地工作,在大幅甩负荷工况下,其动态性能依然良好。这说明仿人逻辑控制器不仅具有良好的动态性能,而且稳态性能可靠。
4 结语
通过上述对比分析可知,本文所提出的锅炉汽包水位的仿人逻辑控制策略,既具有串级三冲量PID控制的良好稳态性能,又具有模糊逻辑控制的良好动态性能。锅炉汽包水位的仿人逻辑控制策略,具有全工况的稳定控制性能,是一种具有良好应用前景的控制策略。
[1]GUIMARAES L N F,OLIVEIRA N S,BORGES E M,et al.Derivation of a nine variable model of a U-tube steam generator coupled with a three-element controller[J].Applied Mathematical Modelling,2008,32(6):1027-1043.
[2]文群英.热工自动控制系统[M].北京:中国电力出版社,2006.
[3]张永生,马运义.核动力蒸汽发生器水位的前馈反馈控制[J].船海工程,2010,39(4):132-134.
[4]于洪泽.锅炉汽包水位自整定模糊PID控制[J].沈阳师范大学学报,2008,26(3):294-296.
[5]殷兴光,王晓华.模糊PID在水位控制系统中的应用[J].制造业自动化,2009,31(7):164-166.
[6]雷金莉,黄泽霞,安静宁.MATLAB在锅炉水位模糊控制系统中的应用[J].宝鸡文理学院学报,2008,28(3): 231-233,244.
[7]张乐,王有朋,周浚哲.锅炉汽包水位控制系统的设计-模糊自整定PID控制器设计[J].科技信息,2008,19: 42,67.
[8]张松兰,何坚强.锅炉汽包水位模糊自适应控制策略[J].盐城工学院学报,2010,23(1):61-64.
[9]黄付刚,李兰君,王馨.基于模糊-PID控制的锅炉汽包水位自适应研究[J].机电信息,2010,252(6):101-102.
[10]郑文杰,张习睿.基于模糊PID参数自调整的锅炉汽包水位控制设计[J].水利电力机械,2007,29(1):16-19.
猜你喜欢
当代水产(2022年3期)2022-04-26
机械管理开发(2022年1期)2022-03-24
成都信息工程大学学报(2021年6期)2021-02-12
发电设备(2020年5期)2020-10-09
电子制作(2019年16期)2019-09-27
爆炸与冲击(2017年1期)2017-04-10
山东工业技术(2016年15期)2016-12-01
电子制作(2016年21期)2016-05-17
汽车零部件(2015年5期)2015-01-03
中国新技术新产品(2011年23期)2011-12-31
