基于光斑图像的激光束散角测量方法研究
2011-02-22 07:30申琳杨进华韩福利姜会林王春艳谢殿广
兵工学报 2011年7期
申琳,杨进华,韩福利,姜会林,王春艳,谢殿广
(长春理工大学 光电工程学院,吉林 长春130022)
激光束散角是评价激光质量的一个重要参数,它不但能反映激光远距离传输时的发散特性,而且能准确评估出相关激光仪器的品质以及激光的传输质量。激光束散角的测量方法很多,如传统的刀口扫描法、套孔法、BBO 倍频法以及现在的基于CCD成像激光光斑的二阶矩法等。由于传统方法对光束要求太苛刻,误差大,而且结构复杂,成本高,很大程度上降低了其广泛普及性。随着CCD 技术和计算机技术的发展及成熟使激光束散角的数字化检测方法得以实现,但在对激光光斑进行处理及消除CCD相机噪声对光斑图像的影响上还存在较大问题,直接影响到束散角测量的精度。针对这些问题,本文提出了较为科学的激光束散角测量方法,对激光光斑图像进行了深入分析,保证了测量的精度。
激光束散角的测量系统由成像光学系统、衰减器、分束镜、可见和红外数字CCD 相机、图像采集卡和PC 机组成。
理想的平行光束经光学系统聚焦,若光学系统像差很小,则在焦平面上形成一个弥散斑,弥散斑大小取决于光学系统入瞳口径大小。实际激光束都存在一定束散角,如图1所示,假设激光束散角为θ,则在焦平面形成的光斑大于平行光入射时的光斑大小,根据光斑直径DC和光学系统焦距f'即可算出激光束散角大小[1]。
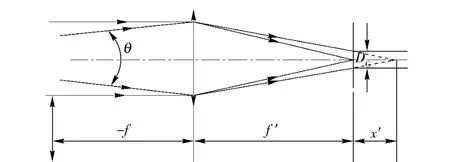
图1 激光束散角测量原理示意图Fig.1 Principle of laser beam divergence measurement
根据牛顿公式和相似原理可得束散角

由于被测束散角较小,所以(1)式可以简化成

1 基于二阶矩的激光束散角测量
由于数字CCD 采集的图像是离散点的矩阵集合,因此在沿轴的任意一个横截面上,激光光束光斑光强中心位置可采用光束强度分布的一阶矩表示

激光光束的束宽wx和wy可由光场二阶矩表示
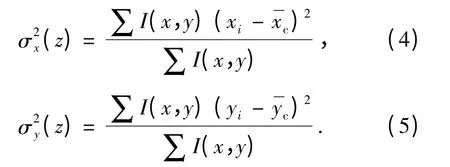
激光光束的束宽

在实验室条件下,采用RA1 000 m/D 数字CCD相机对连续激光进行采集,该连续激光器是波长为532 nm 的半导体泵浦固体激光器,功率50 mW.在采集图像时必须加衰减片,否则最小的积分时间也会使光斑图像饱和。本实验选用532 nm 的9.64 dB衰减片,调节不同的积分时间,获得如下4 种情况的图像。
很明显,在系统中加入一定倍率的均匀衰减片,并调节不同的积分时间,由于相机的动态范围有限,得到了曝光量完全不同的图像。如图2所示,图2(a)为曝光不足;图2(b)为临界饱和,即刚好不到饱和的状态;图2(c)图中有一小部分饱和;图2(d)光斑严重饱和。图3为图2在x 方向上的响应,通过二阶矩对光斑进行计算得到的激光束散角是不同的,得出了光斑从曝光不足到严重饱和束散角越来越增大的结果。
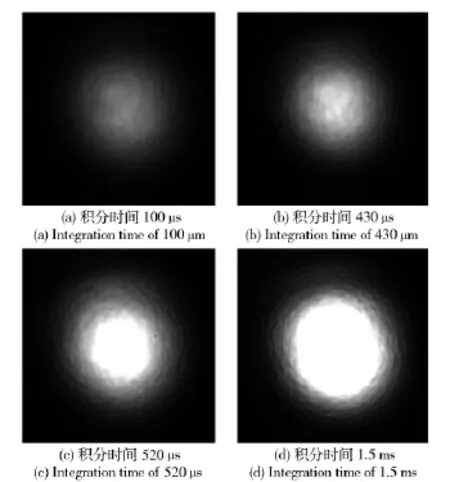
图2 4 种曝光度不同的图像Fig.2 Images in different exposures
该激光光强分布近似为高斯分布,有标准光场振幅分布(高斯分布)表达式[2]

当x2+y2=0 时,振幅最大,即当取下降到振幅极大值1/e(也为光强中心值的1/e2)处中心光斑的半径认为是激光的束宽。从图3中可以明显的观察出,由于饱和图像中心能量的丢失,在寻找能量峰值的1/e2处时,明显比不饱和图像离中心位置远,导致光斑半径增大,从而使激光束散角的测量结果增大,因此用过分饱和的图像来计算束散角是不合理的。
由标准高斯光束光场分布可知,激光的束散角与峰值的大小无关。由此可以得出通过增加或减少积分时间所得到的不饱和图像都可以进行测量。但是经过多次实验,结果并非如此。一般情况下选择抗噪声能力强、动态范围大且线性响应较好的相机。图4为通过连续调节积分时间得到的CCD 线性响应曲线[3]。
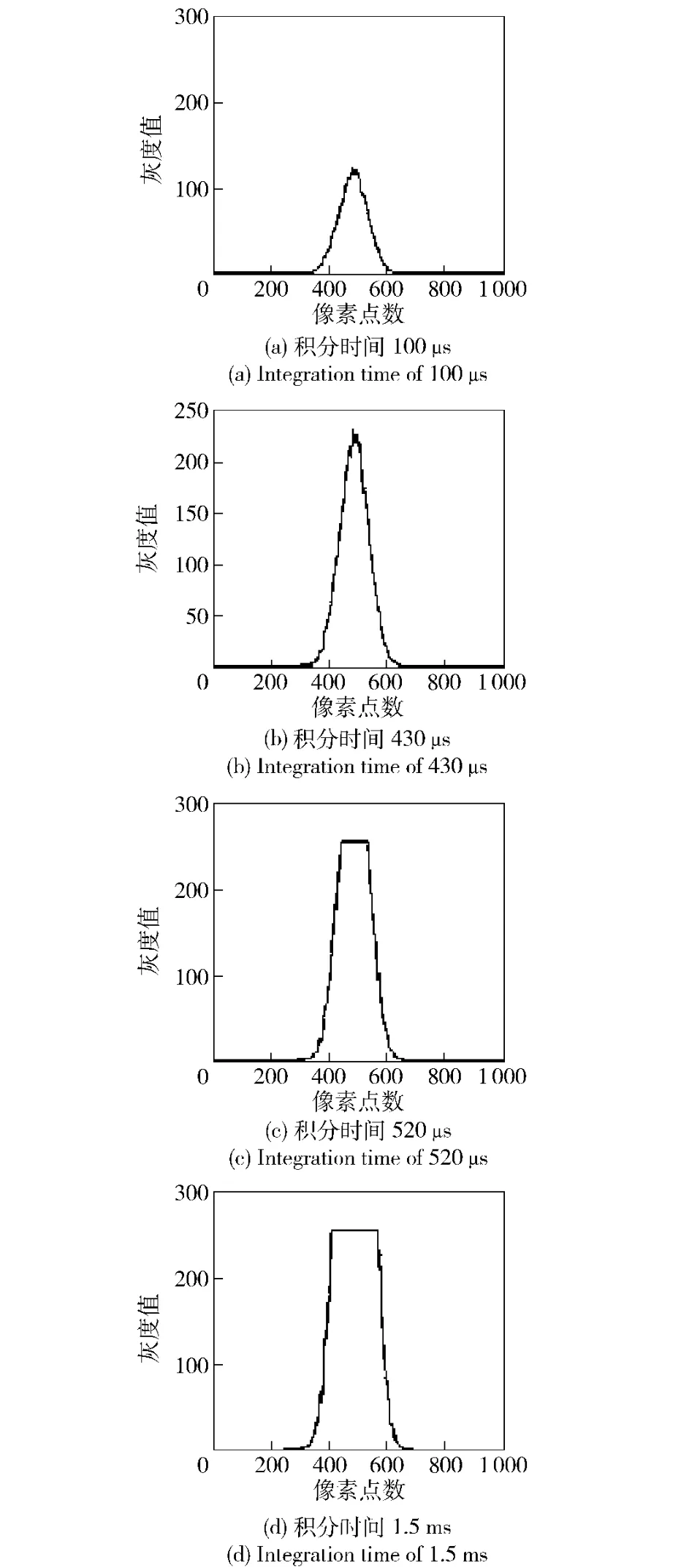
图3 光斑在x 方向上的响应Fig.3 Laser spot responses in x axis
考虑到所取光源稳定性和均匀性的影响,该CCD 相机在0~250 灰度范围内基本为线性分布,线性响应较好,对束散角精确测量影响极小。
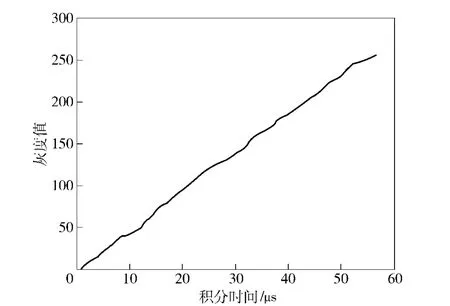
图4 CCD 线性响应Fig.4 CCD linear response
图像的信噪比等于信号与噪声的功率谱之比,但通常功率谱难以计算,一般可以用图像的信号与噪声的方差之比来近似估计图像信噪比。首先计算光斑图像所有像素的局部方差,将局部方差的最大值认为是信号方差,最小值是噪声方差,求出它们的比值,再转成dB 数,最后用经验公式修正,文中采用的局部方差模板大小为5 ×5.在该相机连续测量的情况下,通过计算,图像光斑信号强但未饱和的光斑图像受噪声影响比较小,信噪比大;当图像光斑信号较弱时,信噪比小。由于本文采用的是二阶矩的方法计算激光束散角,图像中的每个像素灰度值都会参与运算,远离光斑中心的区域信号很弱,表现在图像灰度值上本应为0,但是由于噪声的存在,图像中有的像素灰度值为1 或2,由计算公式可以看出,这些噪声都会产生一定的二阶矩分量,致使束散角的最终结果偏大。如果在信噪比低的情况下,对结果影响就更大了。
因此要对光斑图像进行除噪处理。在拍摄黑背景图像时得出噪声表现在像素灰度值上基本均为1,仅有少数像素灰度值为0 或2,且分布均匀。要消除噪声,需要将得到的光斑图像减去噪声灰度均值[6],然后应用3 ×3 模板均值滤波器,选择性地将光斑区域外像素灰度值为2 的噪声除掉,达到了除噪效果,大大提高了束散角测量的精度。由图2(a)光斑图和图2(b)光斑图想得到的束散角略有不同,图2(a)的测量结果一般会偏小,这是由CCD 响应、图像动态范围和噪声共同作用引起的。图2(b)图的灰度范围为0~238,表现在图2(b)图中的激光强度细节会更多,受噪声影响小,测得结果精度较高。图2(a)图的灰度范围为0~112,仅灰阶0~1间很多光强的信息就没有参与计算,且受噪声影响较大,导致了结果的偏低。经过大量实验,对可以进行束散角测量的光斑图像提出要求:
1)CCD 像面大小必须大于激光光斑大小,最好光斑处于图像的中心附近位置。
2)光斑图像无饱和或图像饱和点像素个数不超过10 个认为对束散角测量无影响。
3)光斑灰度能充分利用相机的动态响应范围,即光斑图像灰度峰值介于200~250 之间认为是理想的。
2 通过图像融合技术扩大CCD 动态范围进行激光束散角的测量
从光能接受的角度,CCD 图像探测传感器的动态范围定义为

式中:Imax和Imin分别为可以被CCD 线性检测到的入射光的最大和最小光强。CCD 动态范围较大时可以完整显示光斑的整体特性,得到更多细节的光斑图像。实验采用的相机工作在8 bit 输出状态,动态范围为60 dB.
由于相机动态范围的限制,在进行图像采集的过程中很容易出现曝光不足或曝光过量的不理想状态,而这些图像是不可以直接进行束散角测量的。因此需要通过图像融合的手段,将曝光不足和曝光过量的激光光斑图像进行融合,扩大相机的动态范围,得到适合束散角测量的光斑图像。
提高相机的动态范围有几种方法[4]:
1)降低CCD 的温度,减少暗电流噪声对信号的影响,从而增大相机的动态范围。
2)采用多模式输出提高相机动态范围。
3)通过对多幅曝光量不同的图像进行融合进而提高相机的动态范围。
考虑到上述情况,可以做到尽量让CCD 相机工作在稳定的室温条件下,而且该相机抗噪声能力较强。用多模式尽管可以提高相机的动态范围,但其属于非线性输出,不能进行束散角测量,且这2 种方法对动态范围增加也有限。在硬件条件无法提升的情况下,对多幅图像融合来提高相机的动态范围就显得必要了,而且实现起来方便、灵活。
针对于融合激光光斑图像,本文提出了一种新的图像融合的方法。


式中:I'(x,y)为融合图像;I(x,y)和I0(x,y)为在相同实验条件下,调节不同积分时间分别得到的一幅饱和图像和一幅不饱和图像;η 为一个临近饱和的灰度值,由于该算法对CCD 线性响应要求较高,且该CCD 在临近饱和区有一段非线性区,因此可以取η 在230 附近的一个值。η≤I(x,y)≤η+m 表示一窄段灰度范围,光斑图像中并不是每一级灰度都有分布,通过查看图像在光斑区域内的灰度分布,选取m=5,即图像在[η,η+m]中表现为一个窄的环形分布,从而利用不饱和区域中的图像进行上述比例运算将近饱和区和饱和区的图像替换,即可得到理想的融合图像。该算法亦适用于多幅图像融合[5]。
图5实现了对一幅饱和图像和一幅不饱和图像的融合。从图5中很明显能观察出将原来0~255灰度阶扩大到了0~434 灰度阶。相同条件下,过饱和图像的积分时间是不饱和图像积分时间的2 倍,相当于融合后图像对应接收到的光强是融合前所能接受光强的2 倍,因此动态范围得到明显提高。并获得理想的光斑图像,验证了算法的科学有效性,可直接进行束散角测量,且测量结果精度较高。
注意在选取融合图像的时候,要求不饱和图像的光斑大小大于饱和图像的饱和区域,否则融合无意义,并且在图像融合前要对光斑图像进行消噪处理。
3 实验结果及分析
实验中系统透镜焦距f=1 458.88 mm,CCD 像元尺寸7.4 μm×7.4 μm.为了保证测量的精度,在测量前,激光器需预燃1 h .表1是通过二阶矩法测量波长为λ=532 nm 的连续激光器束散角所得的数据,其中4σ 代表二阶矩法。该连续激光器已经经过权威计量院标定,其束散角mx=0.97 mrad,my=1.01 mrad,不确定度为3%(k=2).表2是通过对一幅欠曝光图像和一幅过曝光图像进行图像融合,然后进行束散角测量的结果。
由于不确定度是由标准偏差决定的,根据实验结果得出,对单幅激光光斑图像进行束散角测量的不确定度(包含因子k=2):σx=kσ11≈0.02 mrad;σy=kσ12≈0.02 mrad.
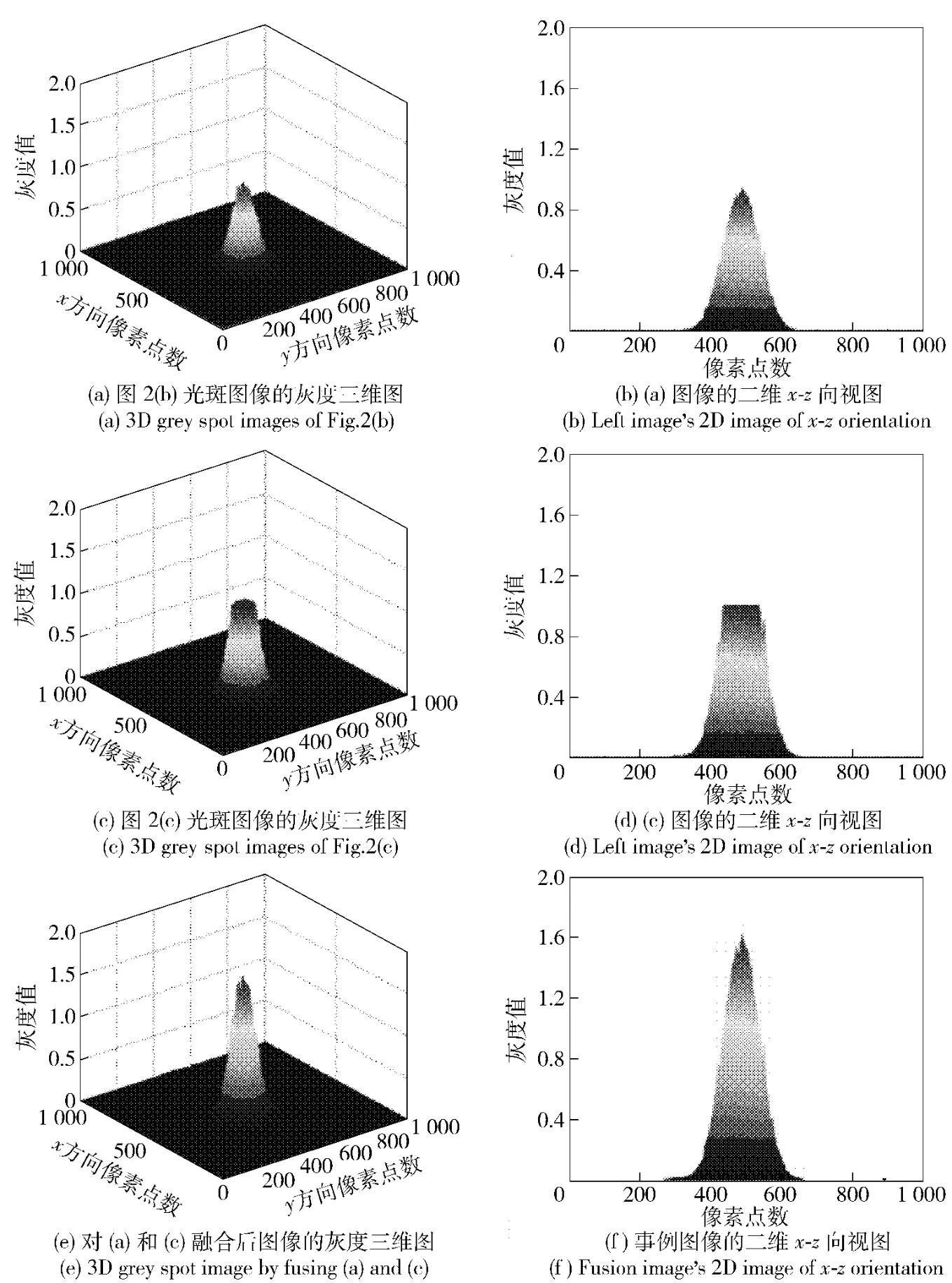
图5 对2 幅图像进行融合Fig.5 Fusion by two different images

表1 连续激光束散角测量Tab.1 Divergence angle measurement of CW-laser

表2 应用图像融合进行的连续激光束散角测量Tab.2 CW-laser divergence angle measurement with image fusion
对一幅欠曝光图像和一幅过曝光图像应用图像融合进行激光束散角测量的不确定度;σx=kσ21≈0.01 mrad;σy=kσ22≈0.06 mrad.
从数据结果看,应用本文方法进行激光光斑测量结果和标定结果保持较好的一致性,由单幅图像束散角测量结果较好,不确定度为0.02 mrad,使用图像融合后的测量也和标准激光器束散角较为接近,可以在较难获得临界饱和图像时应用该方法。
4 结论
通过上述分析得出在进行束散角测量时,选取临界饱和的光斑图像,或者对曝光不足和曝光过量图像的融合图像进行束散角测量,误差小,精度高。不仅可以测量连续激光束散角,还能测量脉冲激光的束散角,而且依然能保证较高的精度。
References)
[1] 杨坤涛.激光测试原理与技术[M].武汉:华中科技大学出版社,2000:143-144.YANG Kun-tao.Laser test principles & technology[M].Wuhan:Huazhong University of Science and Technology Press,2000:143-144.(in Chinese)
[2] 陈军,黄鹏.利用CCD 准确测量激光远场发散角[J].强激光与粒子束,1997,9(4):552-556.CHEN Jun,HUANG Peng.Exact measurement of the far field divergence of the laser beam using CCD camera[J].High Power Laser and Particle Beams,1997,9(4):552-556.(in Chinese)
[3] 袁景和,王植恒.面阵CCD 线性测量[J].实用测量技术,1997,11(6):15-18.YANG Jing-he,WANG Zhi-heng.Linear measurement by using CCD array[J].Practical Measurement Technology,1997,11(6):15-18.(in Chinese)
[4] 周建康.利用图像融合提高CCD 的动态范围进行激光光斑检测[J].兰州大学学报,2006.ZHOU Jian-kang.Improvement of CCD dynamic range with image fusion for laser spot detection[J].Journal of Lanzhou University,2006.(in Chinese)
[5] 华顺刚,王丽丹,欧宗瑛.基于多幅不同曝光量照片的场景高动态范围图像合成[J].大连理工大学学报,2007,47(5):678-682.HUA Shun-gang,WANG Li-dan,OU Zong-ying.Constructing high dynamic range image based on photographs with different amounts of exposure[J].Journal of Dalian University of Technology,2007,47(5):678-682.(in Chinese)
[6] 党丽萍,刘君华,郭鲜.变背景条带状激光光斑边界的提取方法[J].兵工学报,2006,27(5):823- 826.DANG Li-ping,LIU Jun-hua,GUO Xian.A method for edge extraction of bar and strap laser spot in changing background[J].Acta Armamentarii,2007,47(5):678-682.(in Chinese)
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
新一代信息技术(2021年9期)2021-07-30
天津医科大学学报(2021年1期)2021-01-26
中国信息技术教育(2020年2期)2020-02-02
阅读(高年级)(2019年9期)2019-11-15
VOGUE服饰与美容(2019年8期)2019-11-12
阅读与作文(小学高年级版)(2019年8期)2019-10-16
小资CHIC!ELEGANCE(2019年28期)2019-09-12
科技风(2018年19期)2018-05-14
科技创新与应用(2017年11期)2017-04-27