复演对指运动的康复机械手机构学探讨
2011-01-31 06:12俞晶晶钱晋武沈林勇章亚男
上海大学学报(自然科学版) 2011年3期
俞晶晶, 钱晋武, 沈林勇, 章亚男
(上海大学机电工程与自动化学院,上海200072)
人类的双手灵巧精细,能够完成多种复杂的动作,其功能占整个上肢功能的 90%,占全身的54%[1].由此可见,健全的双手在一个人的生活中占有极其重要的地位.同时,手亦是极易受到损伤的人体器官,一旦受损治疗难度很大,治疗后功能恢复也不理想.临床上,手外伤术后多需将患者的手部进行固定,易使淤积于关节内肌腱周围的淤血形成纤维变形,直接导致手指关节及肌腱的粘连,在不同程度上影响了患者的手指功能.此外,由脑损伤和脑卒中引发的偏瘫等后遗症也会导致手指不能自主活动.
基于连续被动运动(continuous passive motion,CPM)康复理论的CPM机在临床应用中已取得了很好的治疗效果.近年来,传统机械学、传感技术、智能控制技术以及其他新兴技术的迅速发展,促进了医疗领域设备的自动化和机器人化,利用机器人技术协助实现康复正在成为可能[2].针对用于手指康复的机器人,国内外已经有了一些研究报道.美国西北大学研制的AFX(actuated finger exoskeleton)手指康复训练机器人,是一种独立驱动每个手指的3个关节的外骨骼式康复训练装置[3];意大利米兰理工大学的基于肌电图(electromyography,EMG)控制的外骨骼式手指康复设备,采用滑轮绳索方式驱动手指运动[4];日本岐阜大学开发的对称式主从手指康复运动系统,是独立驱动每个手指的2个关节的外骨骼式机械装置[5];德国柏林工业大学的手指康复矫形装置[6],通过连杆机构来驱动手指运动;新加坡国立大学的缆线驱动式手指康复系统[7],采用电缆-弹簧传动装置-离合器系统来实现手指运动;中国哈尔滨工业大学的智能促动手功能恢复医疗仿生机械手,也是一种连杆机构驱动手指运动的矫形装置[8].本研究中的手指康复训练机械手采用指尖末端驱动的形式,与目前市场上出现的手指康复训练机构相比,是一种能完成拇指和食指对指康复训练动作的机构,符合患者手指康复的实际需求.本研究在分析人体手指结构及运动特点的基础上,通过实验获取手指末端运动轨迹参数,并利用图谱法进行手指康复训练机器人机构的尺度综合,最后应用Simulink对机构进行运动仿真验证.
1 指端运动轨迹参数的获取
1.1 人体手指结构及运动分析
手指的运动特点由其解剖结构决定,手指解剖模型如图1所示.食指、中指、无名指和小拇指各包括1块掌骨和3块指骨;大拇指从腕部的大多角骨伸出,包括1块掌骨和2块指骨.手指的活动由手内的肌肉控制,这些肌肉都通过肌腱带动骨骼结构围绕关节来进行运动,因此,每条肌肉都有一条或多条与其力矩相反的肌肉与之相互作用.肌肉收缩力是人体主动运动的内因[9].
人体手指关节的运动自由度分布[10]如下:
(1)除大拇指外的四指,相对于手掌的运动由指掌关节(MCP)、指间关节(PIP)、指端关节(DIP)决定.MCP处有2个自由度,可做屈伸和收展运动; PIP和DIP处各有1个自由度,只做屈伸运动.
(2)大拇指共有5个自由度,掌腕骨相连的关节处有3个自由度,指掌关节(MP)和指间关节(IP)处各有1个自由度,可做屈伸运动.
因此,若不考虑手在空间中的6个自由度,手部共有21个自由度.

图1 手指解剖模型Fig.1 Model of the finger anatomy
人体手指关节的运动范围[11]包括:
(1)除大拇指外的四指,指掌关节(MCP)屈伸范围为0°~90°,指间关节(PIP)屈伸范围为0°~100°,指端关节(DIP)屈伸范围为0°~90°.
(2)大拇指指掌关节(MP)屈伸范围为0°~20°,指间关节(IP)屈伸范围为0°~90°,外展范围为0°~40°.
1.2 食指及拇指末端轨迹数据采集
手指运动规律及运动轨迹参数是研究和设计手指康复训练机器人的重要依据.本研究通过Optotrak Certus(NDI,Canada)动态运动捕捉系统获取人体手指末端运动轨迹数据,所设计的实验概念图如图2所示.该运动捕捉系统是通过高精度摄像头(位置传感器)来检测贴在手指上Marker点运动轨迹坐标的原始数据,并将采集的数据传输到S-type系统控制单元(system control unit,SCU)进行原始数据的计算处理,获得Marker点的空间坐标值,最后将数据传送到PC机,进行进一步的数据分析处理.
调研结果表明:拇指功能占整个手功能的50%,而拇指与食指的对指运动占整个手指运动的80%.由此,本研究采集了食指、拇指做对指运动时指端的轨迹数据.此外,由于人体手指长度存在较大的个体差异,男性手指长度的平均值大于女性[12],所以实验中将志愿者按食指长度和拇指长度各分为3类(见表1),其中食指长度为指掌关节(MPC)转动中心至食指末端长度,拇指长度为指掌关节(MP)转动中心至拇指末端长度.

图2 手指指端轨迹数据采集实验框图Fig.2 Experimental diagram of the finger tip trajectory collection
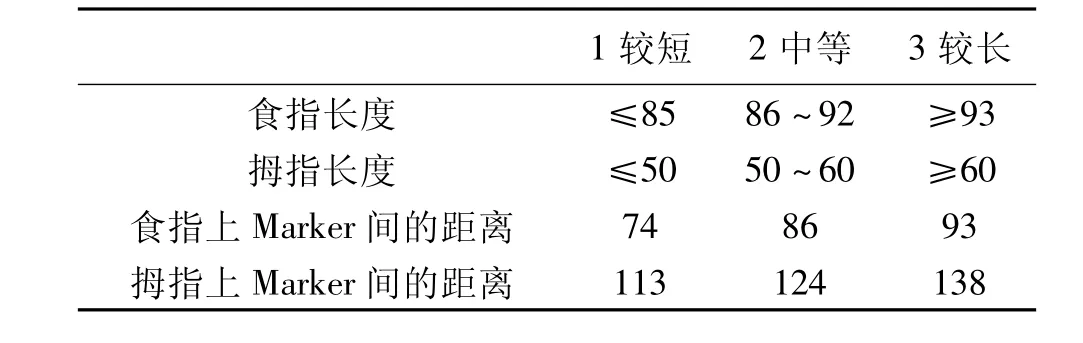
表1 3类不同手指长度及相应的Marker点间的距离Table 1 Three different finger lengths and corresponding distance between Markers mm
具体实验过程如下:
(1)取2个标记点,分别位于食指指掌关节转动中心外侧和食指末端外侧,2个标记点之间的距离按食指长度分3类,分别为74,86,93 mm.
(2)取2个标记点,分别位于腕关节转动中心外侧和拇指末端外侧,2个标记点之间的距离按拇指长度分3类,分别为113,124,138 mm.
(3)在上述4个标记点上放置Marker.
(4)手指做对指运动,受试者处于坐姿,手掌固定,食指和拇指分别做平面往复运动且运动平面相垂直.动态运动捕捉仪系统采样周期为0.01 s,测10 s.记录Marker的轨迹数据.
(5)每个志愿者重复步骤(4)3~4次.
1.3 实验数据
图3所示为通过实验获得针对3类不同食指长度的食指末端轨迹数据.取食指指掌关节转动中心即X=0,Y=0点为连杆机构坐标原点.综合人体四指运动范围及康复需求,规定所设计的食指机构末端的运动角度范围为-60°~10°.
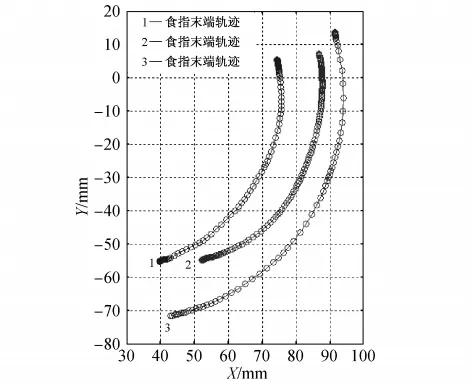
图3 3类食指末端轨迹数据Fig.3 Three kinds of index finger tip trajectory data
图4所示为通过实验获得针对3类不同拇指长度的拇指末端轨迹数据.取腕关节转动中心即X= 0,Y=0点为连杆机构坐标原点.综合人体拇指运动范围及康复需求,规定所设计的拇指机构末端的运动角度范围为0°~25°.
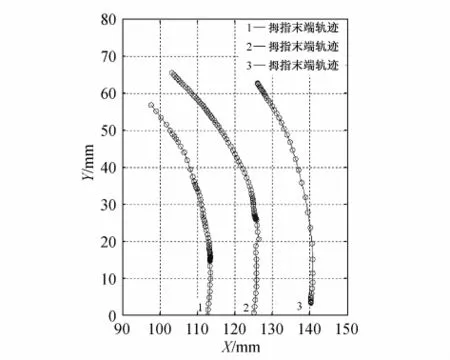
图4 3类拇指末端轨迹数据Fig.4 Three kinds of thumb finger tip trajectory data
2 手指运动辅助机构的类型和尺度综合
2.1 机构综合
选用平面连杆机构的原因如下:①构件间用低副相连,结构简单且易于加工;② 平面连杆机构具有运动形式多样性的特点,其中的连杆可做平面一般运动;③通过改变各杆件的相对尺寸,可以获得符合手指运动轨迹的连杆曲线.
4连杆机构模型如图5所示.当曲柄L1做圆周运动时,摇杆L3仅限于在机架L0的一侧做圆弧摇摆运动,摇杆输出的圆弧曲线并不符合手指运动轨迹曲线的要求.杆L4与杆L2呈刚性固结形成连杆,做平面一般运动.杆L4末端E点在其工作平面上输出的曲线能够满足预期的运动轨迹曲线要求,因此,将L4作为机构的运动输出件.针对不同长度的手指,可以通过手动调节L4的长度,实现手指的康复运动.
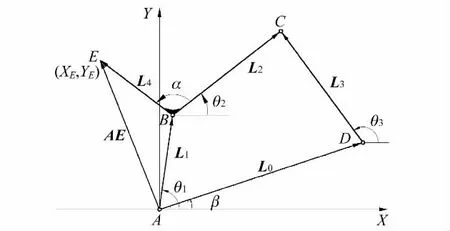
图5 4连杆机构模型Fig.5 Model of four-bar linkage
按照实验测得的手指运动轨迹(期望轨迹),并根据已选定的机构类型决定机构简图的尺寸即为尺度综合.对于平面连杆再现运动轨迹的机构尺度综合问题,由机械学原理可知,理论上可精确再现9个点,实际上由于求解非线性方程有一定难度,通常只能解出6~7个精确点.而在实际工作中,往往要求机构上某点的运动轨迹能最佳逼近某一运动轨迹,而机构参数受到其他限制.对于这种复杂的机构尺度综合问题,需借助最优化方法加以求解[13].当尺寸参数给定时,获取的连杆机构上某点的连杆曲线唯一,但当给定连杆曲线时,反求连杆机构的各个参数却不是唯一的.因此,在实际设计中,可以利用连杆曲线图谱法进行轨迹生成机构的综合设计.根据现有运动轨迹,从连杆图谱中查找与之形状相同或相似的连杆曲线,并获取相应的各杆长度,然后通过比例缩放,求得所需机构中的构件实际尺寸参数.
2.2 食指拇指机构的尺寸参数及三维模型
由连杆曲线图谱法得到食指拇指机构尺寸参数如下:
(1)食指机构.l0=40 mm,l1=20 mm,l2= 80 mm,l3=80 mm,β=40°,α=90°.l4长度可调,对应3类食指长度,l4的大小分别为56,68,75 mm.由于食指末端的运动角度范围为-60°~10°,因此,对应θ1的角度范围为140°~300°.
(2)拇指机构.l0=80 mm,l1=20 mm,l2= 100 mm,l3=100 mm,β=-20°,α=121°.l4长度可调,对应3类拇指长度,l4的大小分别为95,107,123 mm.由于拇指末端的运动角度范围为0°~25°,因此,对应θ1的角度范围为140°~218°.
本研究设计的手指康复训练机器人机构采用铝制连杆铰链机构,食指机构和拇指机构分别辅助患者手指进行运动.系统机构采用步进电机进行驱动.为了适合手指长短不同的患者,机构末端长度可以调整.图6为所建手指康复训练机器人三维模型.
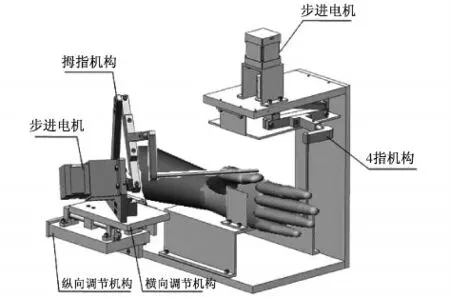
图6 手指康复训练机器人三维模型Fig.6 Three-dimensional model of finger rehabilitation robot
3 机构运动仿真验证
3.1 Simulink仿真模型
根据图5所示的4连杆机构模型建立相应的数学模型.
L1,L2,L3,L4向量间的矢量方程为

由式(1)可得

式(2)对t求导,可得

连杆L2及摇杆L3的角速度为

式(4)为 E点轨迹仿真的函数数学模型Function_1.
由矢量方程AE=L1+L4,可得

即

式(6)为E点轨迹仿真的函数数学模型Function_2.
根据以上推导的4连杆机构数学模型建立如图7所示的Simulink仿真模型,即可求得E点在XY平面内的坐标值.由此验证用图谱法所求的机构尺寸参数的合理性.
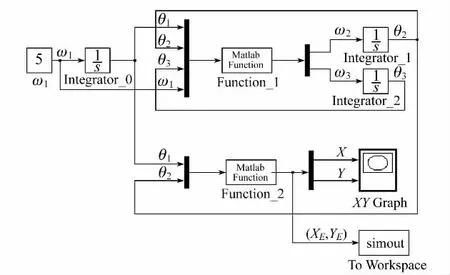
图7 4连杆机构Simulink仿真模型Fig.7 Simulink simulation model of four-bar linkage
3.2 机构仿真曲线及验证
将由Simulink仿真得到的E点的坐标值与实验获取的预期目标值进行对比.图8为食指末端实验轨迹数据曲线与食指机构末端仿真结果曲线.图9为拇指末端实验轨迹数据曲线与拇指机构末端仿真结果曲线.
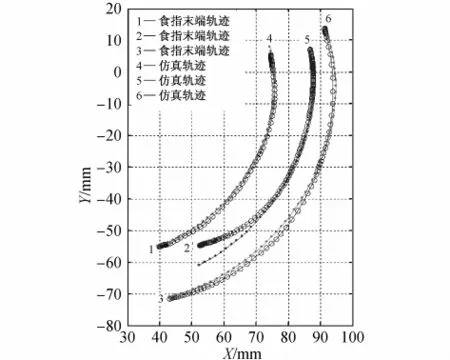
图8 食指轨迹实验数据与仿真结果比较Fig.8 Comparison between index finger tip trajectory data and mechanism simulation results

图9 拇指轨迹实验数据与仿真结果比较Fig.9 Comparison between thumb finger tip trajectory data and mechanism simulation results
仿真曲线和实验数据之间的误差可以用下式表示:

式中,Y(i)为(XE,YE)曲线拟合而成的指数函数,Y(i)=a·exp(b·x(i))+c·exp(d·x(i))+ e·exp(f·x(i)),[x(i),y(i)]是通过实验获取的指端轨迹数据.通过 Matlab计算可得,误差值Error(i)小于2%,基本满足设计精度要求.
4 结束语
本研究针对人体手指神经康复,提出了一种可以复演食指拇指做对指运动轨迹的康复训练机械手.结合人体手指结构、手指运动特点及患者手指康复的实际需求,确定康复动作,通过动态运动捕捉仪完成食指拇指做对指运动时手指末端运动轨迹的数据采集.据此轨迹数据对手指康复训练机械手进行了机构综合,并建立机构三维模型.同时,应用Simulink对手指康复训练机械手机构进行运动仿真,验证了机构设计方案的可行性.实验样机已制造完成,而相应的硬件试验平台正在制作调试过程中.
[1] 陈中伟.手缺损的重建[J].中华创伤骨科杂志,2002,4(4):241-243.
[2] 龚佳伟,沈林勇,章亚男,等.具有拟人跨步的助步轮椅重心检测[J].上海大学学报:自然科学版,2010,16 (2):135-140.
[3] WORSNOPPT T,PESHKINM A,COLGATEJ E,et al.An actuated finger exoskeleton for hand rehabilitation following stroke[C]∥ Proceedings of the 2007 IEEE 10th International Conference on Rehabilitation Robotics.2007:1-6.
[4] MULASM,FOLGHERAITERM,GINIG.An EMG-controlled exoskeleton for hand rehabilitation[C]∥Proceedings of the 2005 IEEE 9th International Conference on Rehabilitation Robotics.2005:371-374.
[5] KAWASAKIH,KIMURAH,ITOS,etal.Hand rehabilitation supportsystem based on self-motion control,with a clinical case report[C]∥ World Automation Congress.2006:1-6.
[6] WEGAA,HOMMELG.Development and control of a hand exoskeleton for rehabilitation of hand injuries[C]∥ 2005 IEEE/RSJ International Conference.2005:3046-3051.
[7] DOVATL,LAMBERCY O,GASSERTR,etal.HandCARE2: a novel cable interface for hand rehabilitation[C]∥Virtual Rehabilitation.2008:64.
[8] FUY L,ZHANGF X,MAX,et al.Development of a CPM machine for injured fingers[C]∥ Proceedings of the 2005 IEEE Engineering in Medicine and Biology 27th Annual Conference.2005:5017-5020.
[9] 侯文生,何琳,吴小鹰,等.手指运动生理特征研究[C]∥2008年医疗仪器学术年会暨理事会论文汇编.2008:57-61.
[10] 焦圣品,白英彩,曾芬芳.虚拟现实中手的建模[J].上海交通大学学报,1998,32(10):134-136.
[11] 杨庆华,张立彬,阮健,等.人类手指抓取过程关节的运动规律研究[J].中国机械工程,2004,15(13):1154-1157.
[12] 霍胜军,范松青,赵臣银.人手指的宽度及各节长度的测量[J].解剖科学进展,2003,9(4):326-328.
[13] 申永胜.机械原理教程[M].北京:清华大学出版社,1999:34-87.
猜你喜欢
实用手外科杂志(2022年2期)2022-08-31
小聪仔(婴儿版)(2020年12期)2021-01-26
公民与法治(2020年4期)2020-05-30
作文中学版(2018年4期)2018-11-28
文理导航·科普童话(2017年1期)2017-05-31
创新作文(小学版)(2016年11期)2016-11-11
小学阅读指南·低年级版(2015年12期)2015-12-11
实用手外科杂志(2015年2期)2015-08-28
实用手外科杂志(2015年3期)2015-08-27
少年科学(2015年8期)2015-08-13