基于dSPACE设计平台的过程控制系统
2011-01-27 01:07王海稳张井岗
电气电子教学学报 2011年2期
王海稳,张井岗
(太原科技大学自动化系,山西太原 030024)
基于dSPACE设计平台的过程控制系统
王海稳,张井岗
(太原科技大学自动化系,山西太原 030024)
本文介绍了基于dSPACE设计平台的过程控制系统,阐述了dSPACE系统的框架、软硬件组成,并以水箱液位系统为研究对象,采用内模控制器为主调节器的双闭环串级控制,同时利用dSPACE的实时监测软件对实验过程进行了在线监测。结果表明,在该实时控制平台上,满足对液位的控制要求。
dSPACE;过程控制;实时控制
dSPACE(digitalSignal Processing and Control Engineering)实时系统是由德国dSPACE公司开发的一套基于Matlab/Sim ulink的控制系统设计工作平台[1]。它实现了和Matlab/Sim ulink的无缝连接的具有高速计算能力的软硬件系统。系统硬件包括高速处理器和I/O等,软件环境由两大部分组成。
1 实验平台的体系结构
基于dSPACE的过程控制系统总体结构图如图1所示。
图1中DS1103控制器板安装在工控机的ISA插槽上,该控制器板提供的ADC模块负责信号采集,DAC模块将系统的控制信号传送给电动调节阀来调节阀门的开度,达到控制水箱液位的目的。将dSPACE系统软件和Matlab/Simu link安装于工控机中,建立好Simulink方框图后,就可使用 RTW(Real-TimeWork-shop)的“Build”把运行方框图自动编译并下载到dSPACE硬件DS1103中,此程序便可以直接运行于dSPACE硬件上。
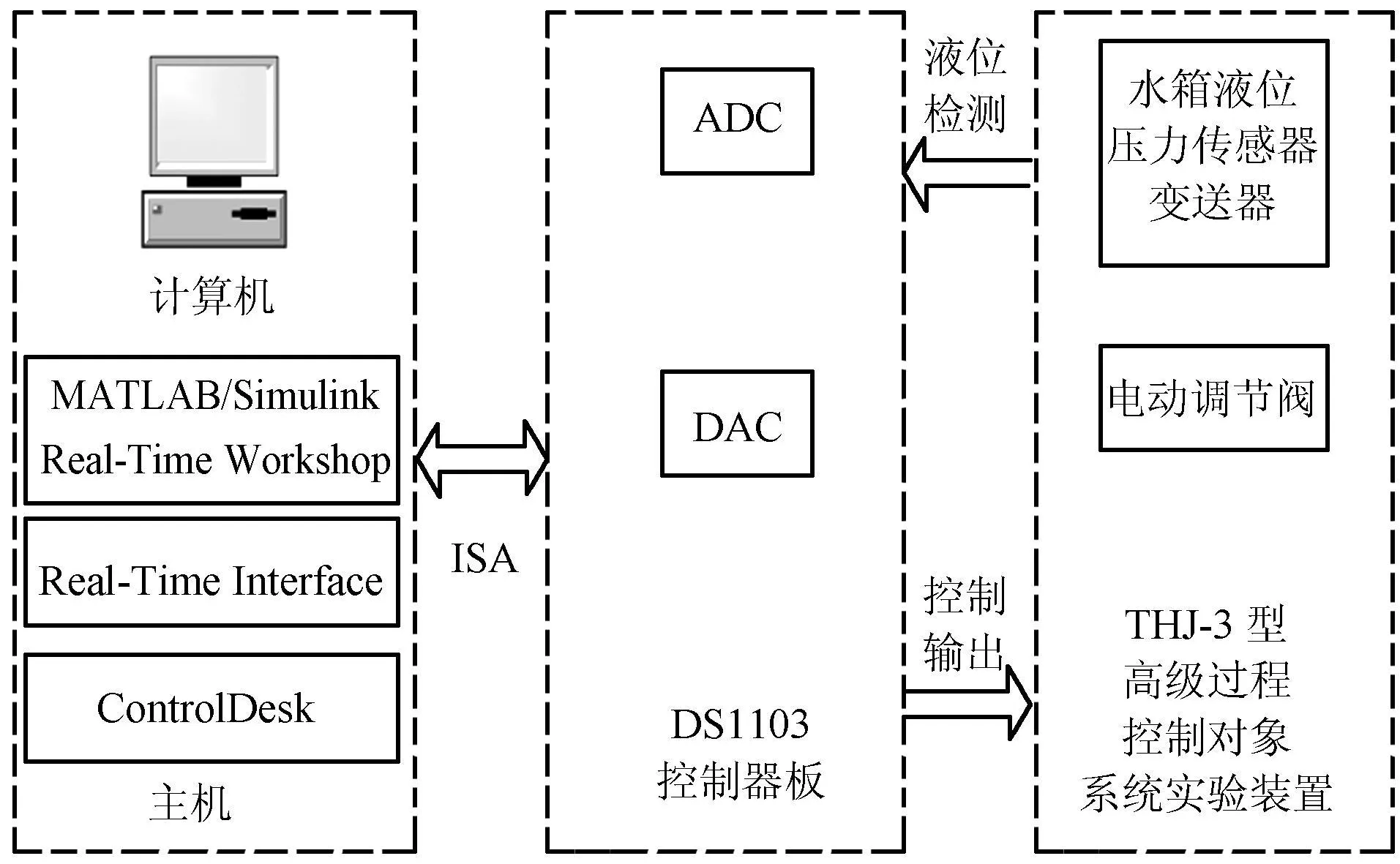
图1 基于dSPACE的过程控制系统总体结构
1.1 系统硬件连接
基于dSPACE的水箱液位系统硬件连接的示意图如图2所示。其中模块DSl103MUX ADC CON1用于检测表征液位高度的电压信号(1~5V),经过 PC机处理,由DS1103DAC C3模块输出电压控制信号,信号调理模块用于将D/A模块输出的电压控制信号转换为4~20mA的电流信号,然后输出给执行机构电动调节阀,用以控制阀的开度。

图2 水箱液位系统实时控制平台
平台中DS1103的模拟信号输出端电压变化范围为:-10V~10V,工业对象要求的驱动信号是4~20mA,通过信号调理模块来实现-10V~10V电压到4~20mA电流的转换。信号调理模块采用华德HD22双路信号隔离器。HD22系列直流变送器是一种能将输入量的直流信号经隔离转换成两组输出量的直流信号,从而实现对被测信号精确测量的仪器。变送器输入、输出和电源三方全隔离,抗干扰能力强,且输入和输出选择范围宽,准确度高,电源可选择导轨安装以便于检测与维护。可广泛用于电信、电力、石油化工等领域的数据采集、信号传输转称和DCS集散控制系统中。
1.2 实验软件系统
软件环境包括实时代码的生成和下载软件RTI(Real-Time Interface)和测试软件两部分。其中RTI是连接dSPACE与Matlab/Sim-ulink的桥梁,一旦通过扩展RTW,便可实现从Simulink模型到dSPACE实时硬件代码的自动下载[3]。测试软件包括自动试验、参数调整软件M lib/M teace、综合实验与测试环境ControlDesk[4]、PC与实时处理器通信软件Clib以及实时动画软件MotionDesk。
dSPACE实时系统中,通过ADC通道将液位值的电压信号经过参数标度变换为液位的实际值后,输入到PC。ADC通道的输入范围为-10~10V,对应的输出范围为-1~1V,二者为线性关系。通过DAC通道实现控制量的输出,DAC通道的输入和输出范围和ADC刚好相反[5]。
dSPACE实时系统中,实时运行框图搭建好后,为了生成对应的实时程序并进一步下载到dSPACE的硬件系统中,在Simulink环境下完成对simulink param eters对话框的参数设置。通过dSPACE提供的ControlDesk软件,可以建立操作界面函数。可以观测到控制器的实际控制效果实时实验监控软件ControlDesk为实验的监控提供了便利的人机接口模块,在ControlDesk下,利用Simulink框图下载生成的*.sd f文件,建立监控页面,加入虚拟仪表,并设置调试页面。在此页面下,可以方便的观察上下水箱的液位响应曲线,并进行实时参数调整等。
2 仿真实例
为了验证dSPACE技术及其内模控制IMC(InternalM odel Control)算法在工程实践中的可行性,我们选择液位控制作为实现的对象,液位串级控制系统副调节器采用比例控制器。主调节器采用内模控制器,整个系统的结构如图3所示。在完成算法框图的建立与下载之后,就可以对液位进行实时控制了。考虑到 dSPACE的DAC通道输出范围为-10V~10V,所以应对副调节器的输出进行限幅。
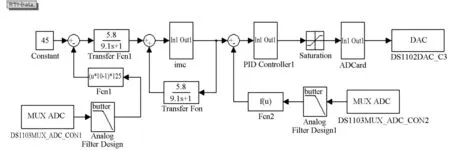
图3 采用内模控制的实时框图
算法框图下载成功后,即自动生成实时代码,并会在当前的工作路径下生成相应的系统描述文件(*.sdf),同时在Sim ulink模型上出现RTData图标。系统描述文件可以直接在ControlDesk中下载至dSPACE处理器板进行实验,除非是更改了模型的原始参数。现取λ=1,内模控制器最大输出设置为50时,运行框图后,可得到如图4所示的系统的阶跃响应曲线。
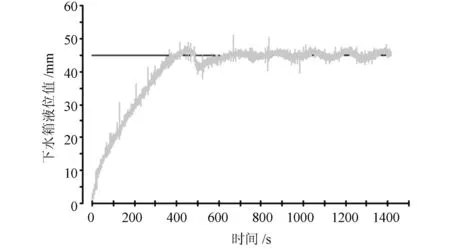
图4 λ=1,IM C输出为50时系统的阶跃响应曲线
3 结语
基于dSPACE的过程控制系统为典型过程对象的控制研究与开发提供了一个良好的实验平台。在该平台上,我们可以很方便地对过程对象进行控制算法的开发,并实时检验所开发的控制算法控制性能的好坏,实时修改控制参数、控制规律。在“过程控制与自动化仪表”的实验教学中,我们采用浙江天煌公司的TH J-3型高级过程控制对象系统实验装置。被控对象有水槽、锅炉、盘管等各种模拟工业现场的装置,并配有相应的检测变送装置和执行机构。该系统包括液位、温度、流量、压力等热工参数,可实现单回路控制,串级控制,系统参数辨识,前馈-反馈控制,滞后控制,解耦控制和比值控制等多种控制形式[6]。我们把dSPACE实时系统作为控制算法及控制逻辑代码的硬件运行环境,通过dSPACE提供的各种I/O板,来实现控制信号的输出和现场信号的读入,以dSPACE提供的综合实验环境ContolDesk作为监控界面,快捷方便的实现对不同控制算法的研究与验证。应用该仿真平台对不同算法和参数的验证,可以设计出更好的控制器。实践结果表明,该仿真平台使得教与学能更好的结合,为“过程控制与自动化仪表”课程的教学实践提供了一个良好的平台。
[1] dSPACE User Guide-Implementation Guide.dSPACE Inc.2003
[2] 杨涤,李立涛,杨旭,朱承元.系统实时仿真开发环境与应用[M].北京:清华大学出版社,2002
[3] dSPACE Inc.Real-Tim e-Interface(RTI and RT I-MP)Im plem entation Guid[M].dSPACE GmbH.2005
[4] dSPACE In c.ControlDesk Experiment Guide[M].dSPACE GmbH.2005
[5] dSPACE Inc.Real-Tim e-Interface(RTI and RT I-MP)Im plem entation Guid[M].dSPACE GmbH.2005
[6] 李永富,杨鹏,张燕,龚思远.基于Matlab的高级过程控制实时混合仿真平台[J].北京:系统仿真学报.2007.19(18):4150-4153
Process Control System Based on dSPACE Design Platform
WANG Hai-wen,ZHANG Jing-gang
(Depar tmen to f Automation,Taiyuan Un iversity of Science and Technology,Taiyuan 030024,China)
This article introduces the process control system based on dSPACE design platform,expounds the framework,software and hardware o f dSPACE system,dual-closed-loop cascade control is app lied in liquid level systemin w hich themaster regulator uses internalmodel controller,and the real-timemonitoring software isalso app lied tom onitor the processof experimentson line.It haswell dynamic characteristic to meet the liquid level contro l requirem ents.
dSPACE;process control;real-time control
TP273
A
1008-0686(2011)02-0069-03
2010-11-17;
2011-03-16
王海稳(1978-),女,博士,讲师,主要从事智能控制方面的教学和科研工作,E-m ail:w heaven@126.com
张井岗(1965-),男,博士,教授,主要从事智能控制和鲁棒控制在电气传动系统中的研究工作.
猜你喜欢
成都信息工程大学学报(2021年6期)2021-02-12
汽车维修技师(2019年7期)2020-01-16
测控技术(2018年9期)2018-11-25
石油化工自动化(2018年5期)2018-11-14
汽车维修技师(2018年11期)2018-05-11
中学生数理化·高一版(2017年1期)2017-04-25
电测与仪表(2015年16期)2015-04-12
电测与仪表(2015年20期)2015-04-09
电测与仪表(2015年21期)2015-04-09
汽车维护与修理(2015年2期)2015-02-28