开放平台下调速系统模糊控制的教学实践
2011-01-27 01:07刘新正贺小玉冯俊龙
电气电子教学学报 2011年2期
刘新正,贺小玉,冯俊龙
(西安交通大学电气工程学院,陕西西安 710049)
开放平台下调速系统模糊控制的教学实践
刘新正,贺小玉,冯俊龙
(西安交通大学电气工程学院,陕西西安 710049)
本文介绍了基于开放式计算机控制直流调速系统教学实验平台,指导学生在传统PID调节器中加入模糊控制策略的教学实践。笔者分析了Matlab/Simu link软件环境下参数在线自整定模糊PID控制器的设计过程,并对比分析了不同控制策略实验结果。开发的实验装置新功能可以有效提升实验教学水平。
直流调速系统;模糊PID控制器;Matlab
0 引言
模糊逻辑和神经网络等智能控制策略引入到实际的电机控制系统,可以实现电机的智能控制[1]。电气工程及其自动化专业本科生的“电机控制”课程教学,除应传授传统的交、直流电动机典型调速控制系统组成和控制原理之外,也应增加先进的智能控制策略在电机控制领域的应用知识。
以往的“电机控制”课程教学内容侧重于前者[2],所配套的电机闭环调速实验装置大多是基于传统PI或者PID调节器的模拟或者计算机数字控制系统[3],缺少设计智能控制器环节。如果在已有实验平台软件中加入智能控制策略,则既能开发出实验装置的新功能,解决智能控制器的空白,保证教学实验的系统性、完整性和可对比性,又能减少设备投入节省费用。
基于以上考虑,我们利用现有资源,在本科生的课程教学中做了初步尝试。我们首先要求学生在Matlab/Sim ulink环境下,建立传统PID控制和模糊PID控制的直流电动机双闭环调速系统仿真模型,仿真分析系统的动态过程。然后,基于已有的开放式直流电动机双闭环调速实验计算机控制硬件平台,速度环采用传统PID控制器和所设计的模糊PID控制器,进行直流电动机双闭环不可逆晶闸管相控整流和可逆脉宽调速系统的在线控制实验。学生将所学的电机调速原理和智能控制方法等基础知识综合运用到实际系统,体会现代科技与传统技术的有机融合。
1 实验平台简介
教学实验室现有的交、直流电动机调速实验平台SMCL-I,为开放式的计算机数字控制系统。其中的他励直流电动机双闭环调速实验的计算机控制系统是基于Matlab/Simulink环境,只需修改上位机中系统模型的相应控制器即可实现不同的控制策略,开放性较好。该系统构成的实验平台其硬件为通常采用的模块化挂件组合,除功率驱动模块和电源模块外,最重要的是数据采集和控制卡。平台上配置了研华的12位PCI-1711板卡,带有A/D和D/A接口。
图1所示为原有以PCI-1711为数据采集和运行控制卡,以Matlab/Simu link为运行软件环境的直流电动机转速和电流双闭环调速计算机控制系统。速度调节器ASR和电流调节器ACR均采用数字PID控制器,起、停和转速给定由信号发生器实现。外部转速和电流摸拟信号通过PCI-1711卡的A/D通道转换为数字量,分别反馈到Simu link模型中ASR和ACR的输入端,ACR输出的数字控制信号经PCI-1711卡的D/A通道转换为模拟控制信号,控制系统的运行。
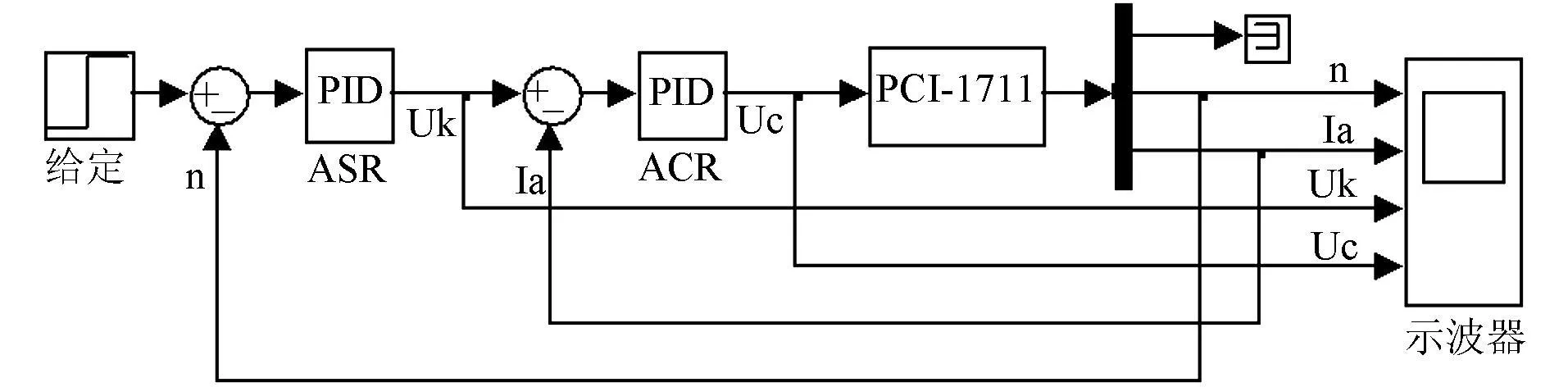
图1 Matlab环境下计算机控制双闭环直流调速系统
2 模糊PID控制器设计
相比于其他智能控制方法,模糊控制以模糊集合、模糊语言变量及模糊逻辑推理为基础,将操作者或专家的控制经验和知识表示成语言变量描述的控制规则,通过自然语言进行人机界面联系,容易融入到控制环节,也容易理解和掌握。本文通过设计他励直流电动机速度与电流双闭环调速控制系统中参数在线自整定的模糊PID速度调节器ASR,在上述的实验平台上实现模糊PID控制算法。
图2所示为在Matlab/Sim ulink环境下所设计的模糊自整定PID控制器结构示意图[6],由一个传统标准PID控制器和一个单变量二维模糊控制器组成。它在传统PID控制器中引入模糊控制策略,根据偏差e和偏差变化率ec在线实时且适当地调整PID参数K p、K i、K d,使系统的动态响应快且超调小。图中K p0、K i0和K d0分别为PID控制器比例、积分和微分系数的初始值;Ke、Kec、Fuzzy Logic Controller、Gian4、Gian5 和 Gian6 等环节构成模糊控制器。模糊控制器由定标环节K e和K ec完成输入论域转换;模糊推理系统Fuzzy Logic Contro ller是模糊控制器的主体,完成输入量的模糊化、根据隶属函数求取隶属度、模糊推理运算和解模糊;定标环节Gian4、Gian5和Gian6输出为K p、K i和K d的变化量 ΔK p、ΔK i和 ΔK d。在线运行过程中,模糊控制器完成对PID参数的在线自整定。

图2 模糊PID控制器结构
我们在设计中应用Matlab自带的Fuzzy Logic工具箱建立模糊推理系统[7,8],并将其嵌入图2所示模糊 PID控制器 Simulink模型的 Fuzzy Logic Controller模块。所设计模糊推理系统为M amdani两输入三输出结构,两输入分别为偏差e和偏差变化率ec。三输出分别为 K p、K i、K d的在线修正量ΔK p、ΔK i、ΔK d。e的语言变量E 的模糊集合取为{NB 、NM 、NS 、NZ 、PZ 、PS、PM 、PB},ec的语言变量EC、ΔK p、ΔK i和 ΔK d的模糊集合均取为{NB、NM 、NS 、ZO 、PS 、PM 、PB};语言变量的隶属函数均选为高斯型;采用中位数法解模糊得到清晰量输出。
模糊推理规则直接关系到系统的控制性能,制定规则时应根据实际系统中e及ec的变化规律,也要考虑PID的3个参数在不同时刻的作用及相互之间的关系,以达到最佳控制效果。例如,通过考察系统起动和突加负载时e和ec的变化规律得出,起动阶段EC保持为NB而E经历了从PB、PM、PS、PZ到NZ的过程,负载突变时E保持在PZ而EC却经历了从PB、PM、PS、ZO到NS的过程。据此设计了改善阶跃响应和负载突变动态性能的部分模糊控制规则如表1和2所示。
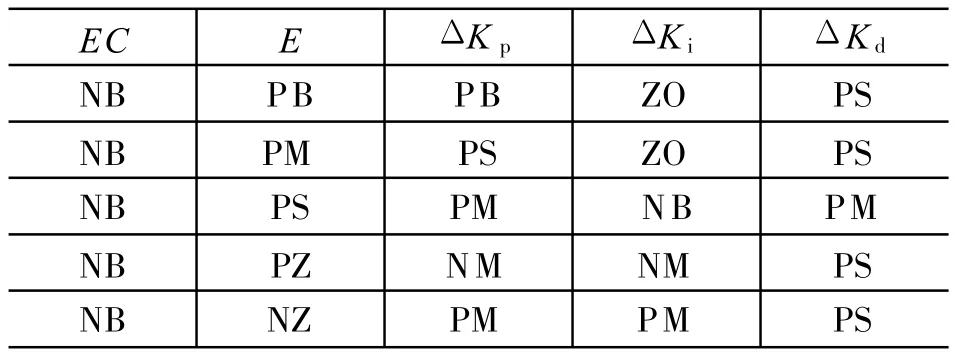
表1 阶跃响应动态性能的部分控制规则

表2 负载突变动态性能的部分控制规则
3 直流调速系统模糊PID控制实验
基于PCI-1711数据采集卡和硬件实验平台,在Matlab/Sim ulink环境下,完成了直流电动机的不可逆晶闸管调速和可逆脉宽系统的模糊自适应PID控制。系统的Simulink在线控制框图如图3所示,其中ASR采用模糊PID控制器。
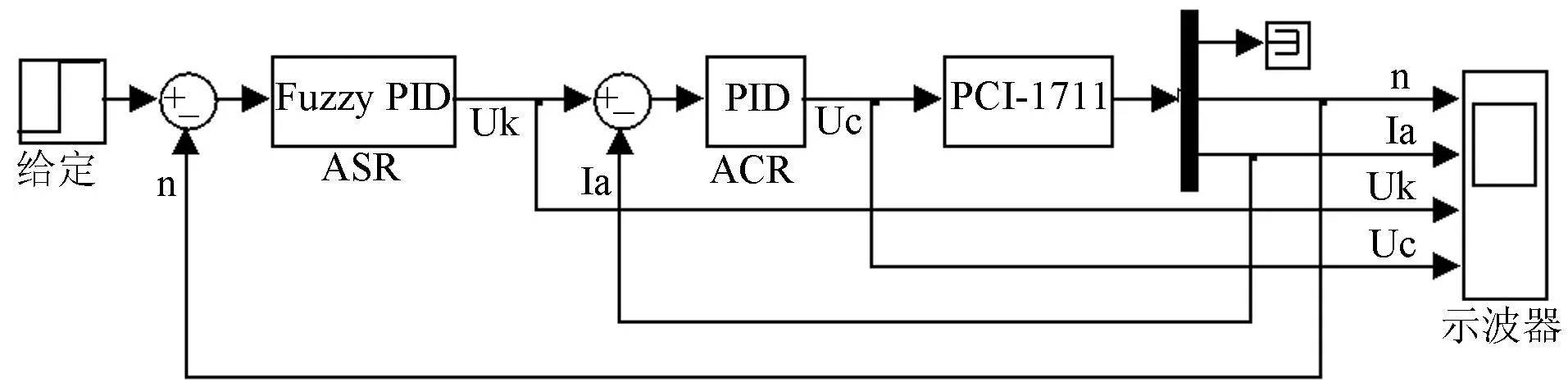
图3 双闭环直流调速系统Simulink在线控制框图
当实际转速为1000r/min时,转速反馈信号为3,即速度反馈比例系数为0.003。速度环模糊PID控制器中,当控制系统的阶跃给定为3时,测得转速偏差e的基本论域为[-3,3],偏差变化率ec的基本论域为[-60,60],e和ec语言变量E和EC的模糊论域取为[-6,6],输出语言变量的模糊论域取为[-10,10],则输入标度因子分别为 K e=2、K ec=0.1;ΔK p、ΔK i和ΔK d的输出标度因子分别为0.3、2和0.001。
转速环分别采用传统PID和模糊PID在线运行,0s时加阶跃给定使电机起动,10s左右突加相同的负载,得到系统起动和负载突变的动态响应实验结果如图4所示。对比可以看出,ASR采用模糊PID控制器,起动时转速超调约为1.3%,调整时间约0.5s;负载突变时最大转速降约0.26,恢复时间约3.7s。采用常规PID控制,起动时转速超调约为7.66%,调整时间4s;负载突变时最大转速降约1.13,恢复时间约8.9s。对比可以看出,闭环调速系统的动态性能得到了改善,达到了预期目标。
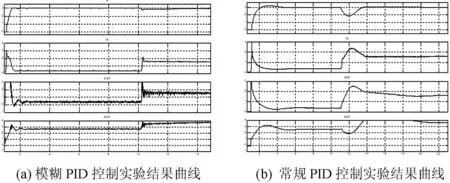
图4 实验结果对比
4 结语
在“电机控制”课程的教学实践中,利用现有的开放式实验装置平台,指导学生在传统PID控制器中加入模糊控制策略,实现了直流电动机双闭环调速系统的速度环模糊PID控制器设计和实验。实践证明,这一尝试不仅开发了教学实验装置的智能控制器作用,而且锻练了学生综合运用知识的能力和实际动手能力。
[1] Rajesh Kumar.Intelligent Tuned PID Controllers for PMSM D rive-A C ritical Analysis.IEEE.2006.2055-2060
[2] 陈伯时.电力拖动自动控制系统—运动控制系统[M].北京:机械工业出版社,2003.7
[3] 许大中,贺益康.电机控制[M].杭州 :浙江大学出版社,2002
[4] 周渊深.交直流调速系统与Matlab仿真[M].北京:中国电力出版社,2007
[5] 李辉.直流电动机调速系统模糊控制的仿真[J].上海:中小型电机.2003.30(1).47-50
[6] 陶永华.新型PID控制及其应用[M].北京:机械工业出版社,2002
[7] 李国勇.智能控制及其Matlab实现[M].北京:电子工业出版社.2005年5月
[8] 冯冬青.一种基于 Matlab的模糊控制器综合优化设计方法[J].北京:系统仿真学报.Vol.16 No.4.April 2004.849-852
Teaching Practice of Fuzzy Logic Control on Open Type Motor Speed Regulating System
LIU Xin-zheng,HE X iao-yu,FENG Jun-long
(X i'an Jiaotong University,X i'an 710049,China)
The teaching p ractice of fuzzy logic algorithm joined to the conventional PID contro l is p resented in this paper.This work is performed on the demonstration platform of a open type com puter-controlled DCmotor speed regulating system,and fulfilled by students with the guidance of teacher.Themeaning of this effort is discussed,the design p rocess of on line parameters self-tuning fuzzy PID speed controller using Matlab/Sim ulink software is explainted in detail,and the comparison of experiment results between conventional PID and fuzzy logic PID control ismade.This developed the new function for demonstration experimental p latform and cou ld im p rove the teaching experiment effectively.
DC motor speed regulating system;fuzzy PID controller;Matlab
TP273+.4
A
1008-0686(2011)02-0045-03
2010-08-16;
2010-11-30
刘新正(1959-),男,硕士,副教授,主要从事电机及其控制方面的教学、科研工作,E-mail:liuxz@mail.xjtu.edu.cn
贺小玉(1987-),男,本科生,研究方向为电气工程及其自动化;
冯俊龙(1988-),男,本科生,研究方向为电气工程及其自动化.
猜你喜欢
疯狂英语·新悦读(2022年7期)2022-11-23
北京第二外国语学院学报(2021年2期)2021-08-13
北方人(2021年13期)2021-07-17
黑龙江电力(2017年1期)2017-05-17
环境科技(2016年5期)2016-11-10
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
电源技术(2015年11期)2015-08-22
共产党员(辽宁)(2015年6期)2015-06-07