FAST望远镜40米模型天文观测软件的开发*
2011-01-25 07:53孙才红
天文研究与技术 2011年4期
管 皓,孙才红
(中国科学院国家天文台,北京 100012)
500 m口径球面射电望远镜FAST(Five-hundred-meter Aperture Spherical Telescope)是我国在建的世界上最大的单口径射电望远镜[1-2],作为对FAST关键技术的前期研究,中国科学院国家天文台与清华大学精密仪器系合作于2009年底在密云观测站建成了FAST望远镜40 m模型(图1)。
在北京密云新建成的FAST 40 m模型的基础上,针对天文观测软件进行了研究与开发。首先介绍了FAST天文规划原理,分析了天文观测轨迹控制软件的需要,给出了其天文轨迹路径规划描述并进行了数学仿真。接着对于天文观测软件的开发进行了详细论述。最后通过实地实验验证了算法与软件的可行性。
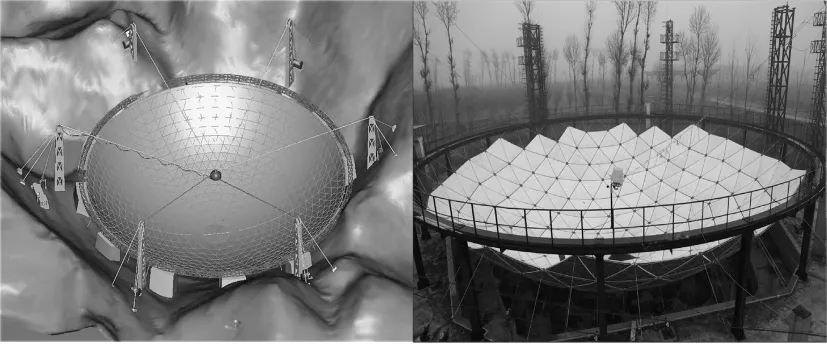
图1 FAST的原型3D模拟图与密云40 m模型实体图Fig.1 The 3D graphics of FAST vs the 40 m model of FAST at Miyun
1 40 m射电望远镜的天文规划软件需求分析
1.1 FAST望远镜天文观测流程
射电望远镜由天线和接收两大系统组成,工作原理(图2)是:射电源天体投射来的电磁波经望远镜的反射面反射后,同相到达公共的焦点,望远镜的接收机装置检测到射电信号后经过一定的放大处理,通过电缆将其传送至控制室,在那里再进一步放大、检波,最后以适于特定研究的方式进行记录、处理和显示。
在FAST跟踪观测天体运动过程当中,根据其入射方向实时形成300 m的局部抛物反射面照明区域(Illuminated area)。当天体运行时,由于焦点位置的移动,接收系统的运动轨迹(Feed Trace)将形成一个弧面,称之为馈源运动面(Focus surface)。在FAST进行观测时,由天文学家输入需要观测天体的位置信息(赤经、赤纬),而后通过天文观测控制程序,控制馈源的运动即在馈源运动球面上划出一条天文轨迹线。
整个馈源舱的具体运动,通过6条电机驱动的钢索控制,即控制电机的转向、速率改变馈源舱的位姿。
1.2 FAST望远镜天文观测软件需求分析
根据以上FAST 40 m模型的天文观测的基本过程描述,对观测控制软件提出以下需求。
(1)根据天文学家所要观测天体的位置信息——赤经、赤纬,实时计算馈源舱体的运动轨迹,进行轨迹规划。
(2)由位置信息及控制时间的要求通过软件计算出6个绳索电机的转动速度与方向。
(3)通过底层的通讯机制(串口),根据电机的通讯协议,将控制数据包发送给电机控制部分——PLC控制器,进行电机的控制。由于控制的直接输出量是电机的转速,因此软件中必须含有电机限速保护模块,即当速度过大时,及时停车。
(4)通过TCP/IP通讯模块,实时接收测量计算机发送来的位姿数据,形成反馈信号,作为控制参量。

图2 FAST原型原理示意图Fig.2 Schematic diagram of the FAST
(5)运行过程中进行实测位姿数据的记录,以便实验完成后利用数学处理软件进行分析处理。
(6)终端的控制误差控制在均方根误差2 mm内。
2 天文观测软件的算法与仿真
进行天体跟踪位姿控制,首要的是建立坐标系统[3]。根据FAST观测原理,结合天文学规范,可建立三套坐标系,如图3,以主反射面的曲率中心O为原点建立时角直角坐标系,C1[Xt-Yt-Zt],Xt、Yt、Zt分别指向Qs、西点W、北天极Pn;以O为原点建立地平直角坐标系C2[X-Y-Z],X、Y、Z分别指向北点N、东点E、天顶Z;以主反射面的底点A为原点建立地平直角坐标系C3[X'-Y'-Z'],X'、Y'、Z'分别指向北、东、天顶。3个坐标系都为左旋系。
在跟踪射电源时馈源的相位中心在C2中的坐标为:
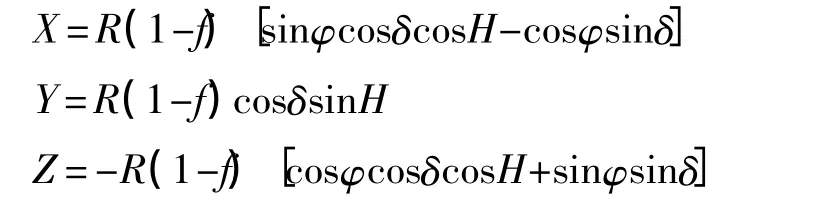
在密云试验基地,建立的是直角坐标系,X、Y、Z分别指向东点E、北点N、天顶Z,是右手系,故在密云基地进行天文观测时,馈源相位中心在全局坐标系中的坐标为:

以上公式即是天文轨迹生成的算法依据[4],通过C++编码写入软件轨迹生成模块中。
对于密云40 m模型而言,各个参量意义如下:φ为观测地的地理纬度;H、δ为射电源在天球时角坐标系中的时角和赤纬;R为反射面的曲率半径;f为焦径比;R(1-f)一项实际就是馈源运动球面的曲率半径。时角H的计算如下:

式中,S0当日世界时为0 h时所对应的恒星时,查《天文年历》可得;T为北京时;μ为1/365.2422;λ为观测站的地理经度;α为射电源在天球赤道坐标系中的赤经。
在密云实际观测试验中,最大观测角为40°,因此时角也有一个限定范围,其限制条件如下:
令ψmax为FAST观测的最大天顶角,则:
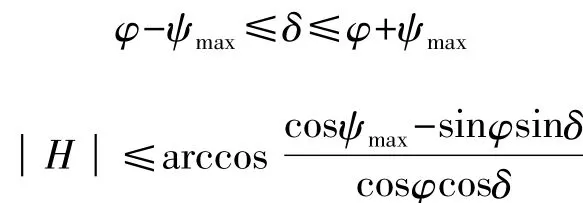
在实际观测时,控制软件必须注意此边际条件,这是一项重要的安全指标。
在实际观测软件开发与现场实验之前,根据天文规划理论结果,进行数学仿真,并给出几个典型的输入参量绘制出若干条天文轨迹。由仿真结果的轨迹线可以初步验证理论结果的正确性与合理性,并对现场实验时馈源实际运行的轨迹有一个基本的了解与判断。
对于密云模型的基本参量如下:
·地理经度λ:7小时47分53.628秒
·地理纬度 φ:40°33″23.97'
·曲率半径R:18 m
·焦径比f:0.466
·赤经、赤纬由天文学家根据星表输入。
·最大观测角:40°
在仿真程序中,选取了22°、32°、42°3条不同的典型赤纬位置,在最大观测角限定下的时角范围内进行了仿真。仿真结果如图4。
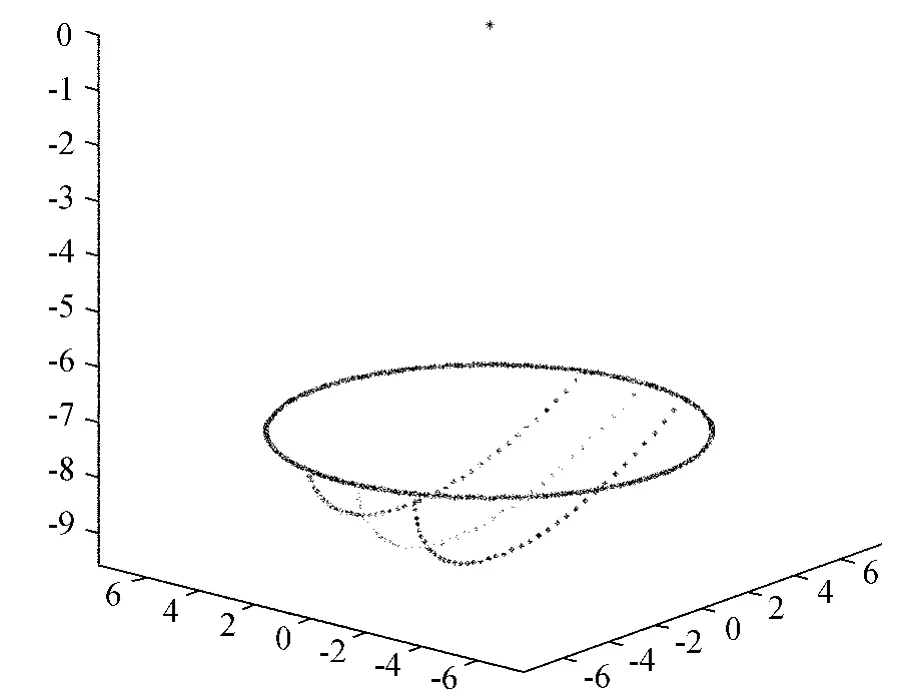
图4 赤纬分别为22°、32°、42°时的天文轨迹仿真图Fig.4 Simulation of tracks of astronomical objects at different declinations(22°,32°,and 42°)
3 观测软件设计与开发
对于FAST密云40 m模型,馈源的运动由6根高铁塔伸出的钢绳索拖动实现。每根钢绳的收放则是由铁塔基部的电机转动带动卷扬机滚筒实现的。当进行天文观测时,系统的运行情况如图5。首先确定要观测天体的位置。由输入的天体的位置数据(赤经、赤纬)就可以由观测程序确定馈源不同的运动轨迹(如图5,3条不同轨迹就是由3个不同的赤纬数据所确定的)。当一条天文轨迹确定时,在具体的观测程序中是实时生成的时间序列点,在整个观测时间内(观测时间也根据天文学家需求给定),每个时刻计算出理论位置点,再由程序驱动具体的执行机构(实验中采用工控PLC控制电机的形式)驱动馈源的运动。
馈源在运动中,它的实时位置由专门的测量设备全站仪测得,通过测量计算机发送给观测软件,软件中有数据记录模块,可以记录下天文观测过程中馈源的实际位置,观测结束后可以通过实际位置同理论位置的对比分析观测软件的性能。
程序的流程示意与软件整体结构如图6、7。软件运行界面如图8。

图5 系统示意图Fig.5 Structure of the system

图6 观测软件程序流程示意图Fig.6 The flowchart of the observation software

图7 软件结构示意Fig.7 Structure of the software

图8 软件运行界面Fig.8 User interface of the software
4 实验与结论
在中国科学院国家天文台密云实验基地进行了现场的运行调试。在软件的控制下,馈源舱在6根钢索的拖动下,根据输入运行了完整的天文轨迹。运行过程中,由全站仪测量馈源的位置并由观测软件进行记录。要求终端(馈源舱内承载接收机的机械平台中心位置)位置误差(以均方根表示)在2 mm以内。
实验结束后,利用数学软件对实验中采集的数据进行了处理。
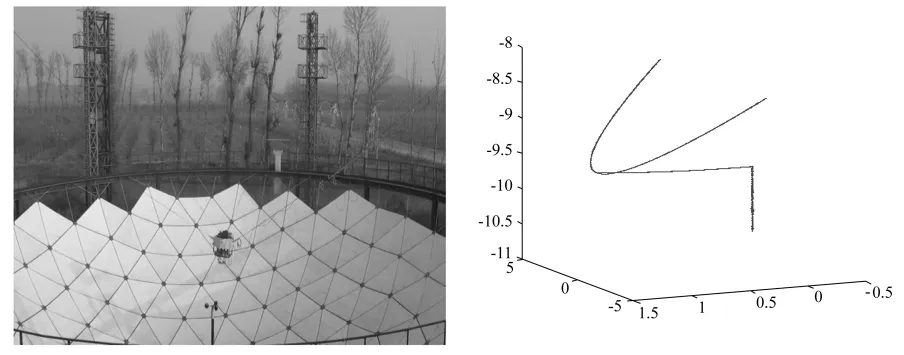
图9 根据记录的实际运行数据所画出的天文轨迹图Fig.9 Celestial track according to the recorded data
图9是输入赤纬32°时所走的天文轨迹,整个运行过程分为3部分。首先从反射面最低点处(0,0,-10.6 m)升起至馈源球面最低点(0,0,-9.6 m),此过程为直线运行。第二阶段为从馈源运动球面最低点运行到所要走的天文轨迹曲线的中点,此过程为直线运行。而后就是运行根据天文轨迹规划算法得出的轨迹。
整个运行时间为5000 s,每秒有10个测量采样点,所以共有50000个点。将测量点同理论轨迹位置点作对比,得到误差分析图,最后得出的均方根误差值为1.89 ms,满足要求。

图10 实际测量数据得出的运行轨迹图与误差图 (5000 s)Fig.10 Errors of celestial track during the entire running process(5000 seconds)
5 结束语
针对FAST望远镜的天文观测需求,在国家天文台密云观测站新近建成的FAST望远镜40 m模型的基础上,开发了天文观测软件。首先介绍了FAST的天文规划,作为馈源天文轨迹跟踪运动的理论基础,而后针对理论推导结果进行了数学仿真,为实地试验奠定了良好基础。在理论与仿真的基础上开发了天文观测软件,并在密云实验场地进行了现场实验,通过对实验过程中所记录数据的处理,软件符合预期的要求,为日后针对500 m原型的软件开发奠定了良好的基础。
致谢:感谢清华大学精密仪器系唐晓强老师的帮助与指点。
[1]Nan R D,Peng B.A Chinese Concept for the 1 km2Radio Telescope [J].Acta Astronautica,2000,46(10/12):667-675.
[2]南仁东.500 m球面反射面射电望远镜FAST[J].中国科学(G辑),2005,35(5):449-466.
[3]朱文白.FAST望远镜天文规划和馈源支撑的相关研究 [D].北京:中国科学院国家天文台,2006.
[4]路英杰.大射电望远镜馈源支撑系统定位与指向控制研究 [D].北京:清华大学,2007.
猜你喜欢
工会博览(2022年16期)2022-07-16
工会博览(2022年14期)2022-07-16
中国测试(2022年5期)2022-06-10
航天器环境工程(2022年1期)2022-03-11
今日农业(2021年8期)2021-11-28
航天制造技术(2020年5期)2020-11-10
天文学报(2020年5期)2020-09-28
科技视界(2020年19期)2020-07-30
北京园林(2020年1期)2020-01-18
科技传播(2019年22期)2020-01-14