小数时延补偿算法的设计及应用*
2011-01-25 07:53:38舒逢春
天文研究与技术 2011年4期
江 悟,舒逢春
(中国科学院上海天文台,上海 200030)
小数时延这个概念是随着信号离散化处理产生的,在连续信号处理中无需将小数时延和整数时延进行区别对待。在A/D过程中,通过采样将信号离散化,如果两路来自同一信号源的信号不同步,时间差是采样间隔的非整数倍,这时就会出现小数时延。小数时延补偿在数字信号处理中很常见,最典型的有声学信号处理中的回声消除、多采样率转换等。在VLBI系统中[1],一条基线两台站接收到的同一卫星或射电源信号存在时延差,在相关处理过程中,尝试对齐来自两个接收站的信号,也就是通过时延补偿使得两个站的信号同步,但相关处理是在数据采集终端之后,如果两台站信号的时延差不是恰好等于采样间隔的整数倍,那么就无法通过采样点的平移实现两站信号的同步,这时候进行小数时延补偿将无法避免。在VLBI数据处理过程中,小数时延补偿又叫做小数比特改正。

图1 VLBI中两站接收的信号的时延示意图Fig.1 Illustration of signal delay between two VLBI stations
目前的VLBI测角精度达到了毫角秒量级;在深空探测任务中,利用VLBI技术解算航天飞行器下行载波的相位时延精度有望达到皮秒量级;在天线组阵过程中,需要对射频载波的相位同步,这些都需要精确的时延补偿技术作为保障。虽然现在的A/D转换器可以达到1 GHz甚至更高的采样频率,但是相关中心与VLBI台站距离较远,受目前传输带宽的限制,不宜采用过高的采样频度,所以采用较低的采样频率,利用精确的时延补偿技术符合当前的需要。现行的小数比特改正的办法是基于频域线性相位加权的方法:在视频频段乘以一个条纹相位旋转因子φ=2πfTfbit,这种针对的是宽带VLBI,在窄带VLBI中,只需要在对应的频点fk乘以φ=2πfkTfbit即可。本文重点介绍基于时域的一些小数时延补偿的算法,并通过仿真分析基于Farrow结构的Lagrange插值方法在宽带VLBI中作为小数比特改正的适用情况。
1 基本原理和算法
时域中小数时延滤波器大体上分为3个方向:一是Farrow提出并陆续发展起来的Farrow结构的FIR滤波器组[2];一是基于多速率采样和插值的方法;一是采用最小均方误差逼近的方法,也有一些综合的方法,比如将插值与FIR滤波器组相结合。当然还有采用全通滤波器来设计,但是考虑到VLBI相关处理过程中的线性相位的要求,一般都用FIR滤波器实现。文[3]做了很多全面细致的工作,并分类总结了小数时延的滤波器设计、性能及其实现方法,得出的结论是对一般的小数时延改正Lagrange插值是较好的选择,而当时延是一个变化的量时,即需要不断更新时延量的大小时,采用Farrow结构的滤波器组是一种较好的容易实现时延控制的方案。
1.1 基本原理

D取小数时,hid(n)呈现无限冲激响应的特点,这在实际处理时很难实现,只能用一个有限冲激响应的系统(FIR)近似达到这个理想响应的效果。设有限冲激响应为h(n)(n=0,1,…,N),其傅里叶变换 H(ejω)为 H(ejω)=,取其与理想的频域响应 Hid(ejω)之差 E(ejω) 衡量近似的效果,E(ejω)=H(ejω) -Hid(ejω)。
1.2 最小均方 (LS)误差逼近方法
从理想系统的时域响应可以看到,sinc函数的函数值随n的增大趋近于0,因此可以取sinc函数的有限项代替理想的系统响应,并可以由此计算出其逼近误差E,

这就是LS逼近方法的基本思想。当然可以通过加窗、平滑过渡带等方法达到更好的逼近效果[1]。
1.3 Lagrange插值算法
Lagrange插值则是从另外一个角度考虑逼近理想系统响应的效果,在计算逼近误差的频域响应时,让其在某一频率值取得误差的最小值。通常将这个误差最小值设在频率0,因为处理的信号一般是低频信号。这样就得到:


得到矩阵的解恰好就是经典的Lagrange插值函数,

1.4 Farrow 滤波器组
上面讨论的方法都有一个特点,当时延量D连续变化时,每次都需要重新计算并更新FIR滤波器的系数,这在实际处理中特别是实时信号处理中比较困难,为了解决这个问题,Farrow提出一种基于Farrow结构的FIR滤波器组的实现方法[2],能方便处理连续变化的延时量,系统结构框图如图2,这样不需要更新滤波器组的系数,只需要调节延时量单元即可。

图2 Farrow结构滤波器组框图Fig.2 Block diagram of filter groups of the Farrow structure
Farrow结构的思想是从另外一个方面,用以时延D为变量的多项式逼近理想系统的响应,设采样间隔为Tsampl,D=aTsampl,滤波器组的系统函数可以表示成:

因为时延量是连续变化的,所以系数Cn,m的求取应满足使逼近误差式 (7)最小,

式中,(ω0,ω1)、(a0,a1)分别表示信号的频带范围和时延量变化范围。将上面系统函数式(6)转换到含中间变量的表达形式,

恰好对应图2的系统框图,关于滤波器组系数的详细计算过程将在下节作进一步描述。
2 基于Lagrange插值的Farrow滤波器组仿真及应用
前面提到在一般的小数时延处理中,Lagrange插值是较好的选择,若涉及到连续变化的时延系统,则需采用Farrow结构的滤波器组,下面结合Lagrange插值和Farrow结构设计一个可以进行时延控制的Farrow-Lagrange(F-L)滤波器组,介绍其原理、实现方法,并通过仿真分析它的性能。
2.1 F-L滤波器组的设计
根据1.4介绍的原理,现在将Farrow结构和Lagrange插值结合起来,让滤波器组的Cn(a)(Cn系数满足Larange插值特征,让m(m=0,1,…,P)组滤波器的系数Cn,m满足Farrow结构的逼近准则。这样各系数的具体计算过程也可以分成两步:
(1)将时延量的变化范围(a0,a1)(一般在滤波器阶数的中间值附近取值)分成多个区间,细分的方式可以是均匀分割或者根据时延量的统计特点进行非均匀分割,这里取均匀分割,则第q个分割点的值dq可以表示成:

根据Lagrange插值函数式(5)针对每个dq设计一个FIR滤波器hdq(n)(n=0,1,…,N),滤波器的阶数N+1将对应滤波器组的阶数,一般取4阶,也可以达到线性相位的要求,这样就得到Q+1个N+1阶插值滤波器。
(2)对每个分割点时延量dq对应的N+1阶滤波器的系数hdq(n)(q=0,1,…,Q),用含dq的P阶多项式在一定准则下拟合,这里一般用最小均方误差准则。

写成矩阵的形式是DQCn→hQ,n,式中,

一般情况下,P<Q,所以系数Cn只能使得式(10)右边的求和逼近于左边而不能完全吻合,这里一般用基于最小均方误差准则的多项式拟合求解。这样将得到滤波器组的所有n阶系数,同样的方法可以得到其余N阶系数。
当然,Farrow结构滤波器组的系数还有其他求解方式,也可以将hdq(n)换成通过其他逼近方法得到的系数向量求解滤波器组系数。文[4]提出了一种改进的Farrow结构,滤波器组的其余分支都是由前两个滤波器分支与简单滤波器单元级联加权后得到的,并将时延变量单元换成 (1-2 d),0<d<0.5。
2.2 仿真结果及分析
频域线性相位加权,sinc函数逼近和Lagrange插值的方法各有自己的误差来源,图3利用1500 Hz的正弦波作为输入信号,比较了3种方法的补偿效果。从图中可以看到,频域线性相位加权方法的误差是由于时域上对信号进行截断引起的,类似于吉布斯现象,而且是不可避免的。sinc函数逼近的方法主要受滤波器长度的影响,滤波器的阶数越多,误差越小。Lagrange插值相对于sinc函数逼近的方法需要的滤波器阶数较少,补偿效果也比较好。总的来说,3种方法都是频率分辨率越高或者滤波器阶数越多,补偿的效果就越好。

图3 3种小数时延补偿方法的比较Fig.3 Comparison between three methods of compensation for fractional delay
同样也仿真了时延可调的Farrow结构滤波器组,分析了滤波器组的频率响应包括幅频响应和相位响应。图4是用3次多项式拟合的每个滤波器长度为16的F-L滤波器组,其本质是Lagrange插值的滤波器,但是经过拟合后能够适应不同的小数时延变化量。这也就是Farrow结构的作用。同时,从仿真图可以看出,相位时延的线性范围有限,并且最后都趋向于最接近的整数时延点。如果有用信号的频率范围覆盖到高频部分,相应的滤波器的阶数应该增加。但是,滤波器在设计时,一般要求时延值在滤波器长度的中间值附近补偿效果最好,所以在实际设计时需要权衡滤波器长度与计算量和实时性等要求。
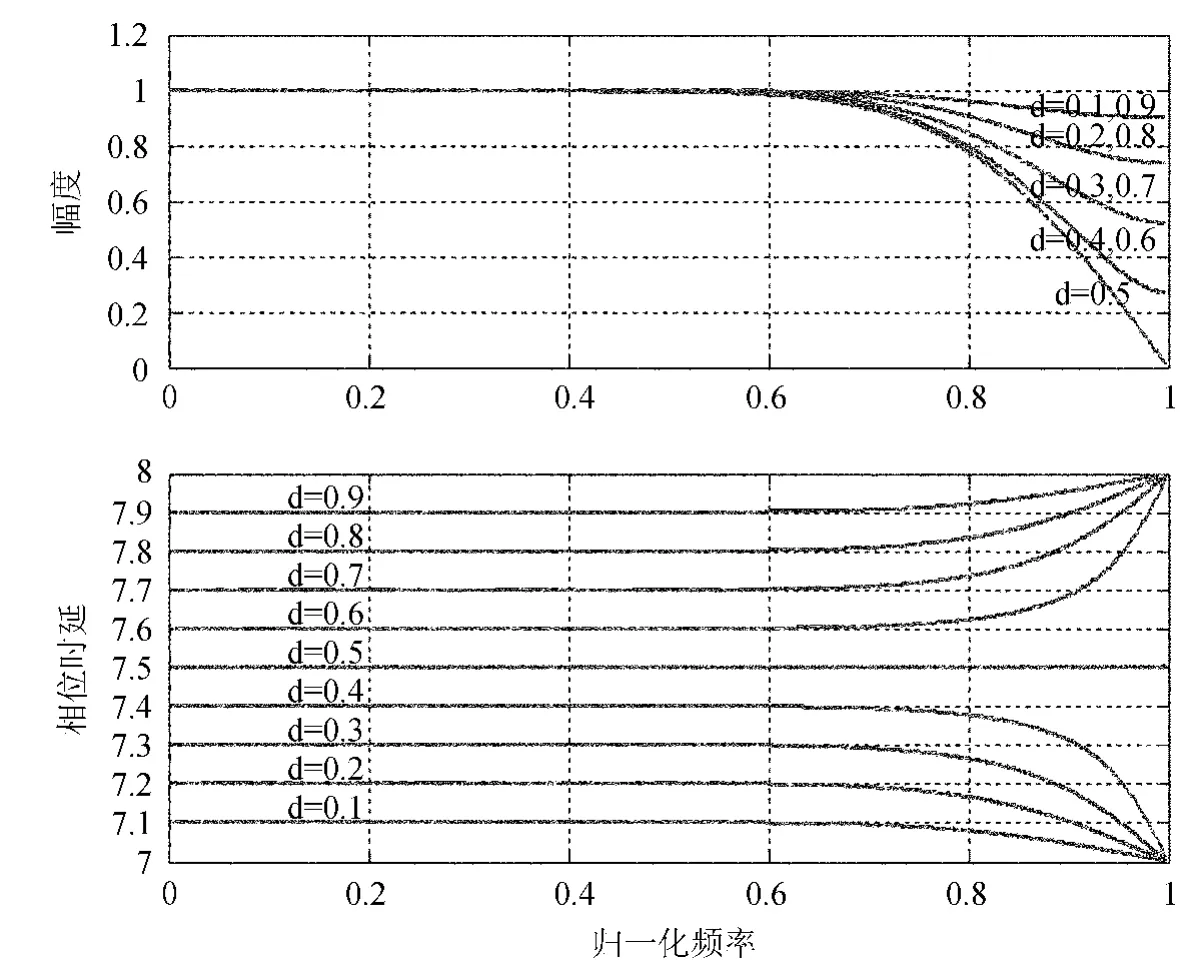
图4 3次多项式拟合、分支滤波器长度为16的F-L滤波器组的幅频和相频响应Fig.4 Amplitude responses and phase delays of groups of 16-tap F-L filters for 3-order polynomial fitting
2.3 在遥测阵信号处理中的应用
利用我国VLBI网对深空探测器遥测信号进行天线组阵已经取得初步的实验成果[5],对来自各天线的信号进行时延补偿时涉及到小数时延的问题。这里通过对“火星快车”遥测数据的处理检验了基于Farrow结构的Lagrange插值滤波器组的小数时延补偿算法,用上面介绍的15阶滤波器组进行小数时延补偿,并与已有的频域线性加权方法作了比较,如图5。从图中载波功率可以看出,在不进行小数时延补偿时,功率谱的损失值与理论上计算出的3π2/288基本符合[1]。另外,基于Farrow结构的Lagrange差值滤波器组与频域补偿的结果基本没有差别。
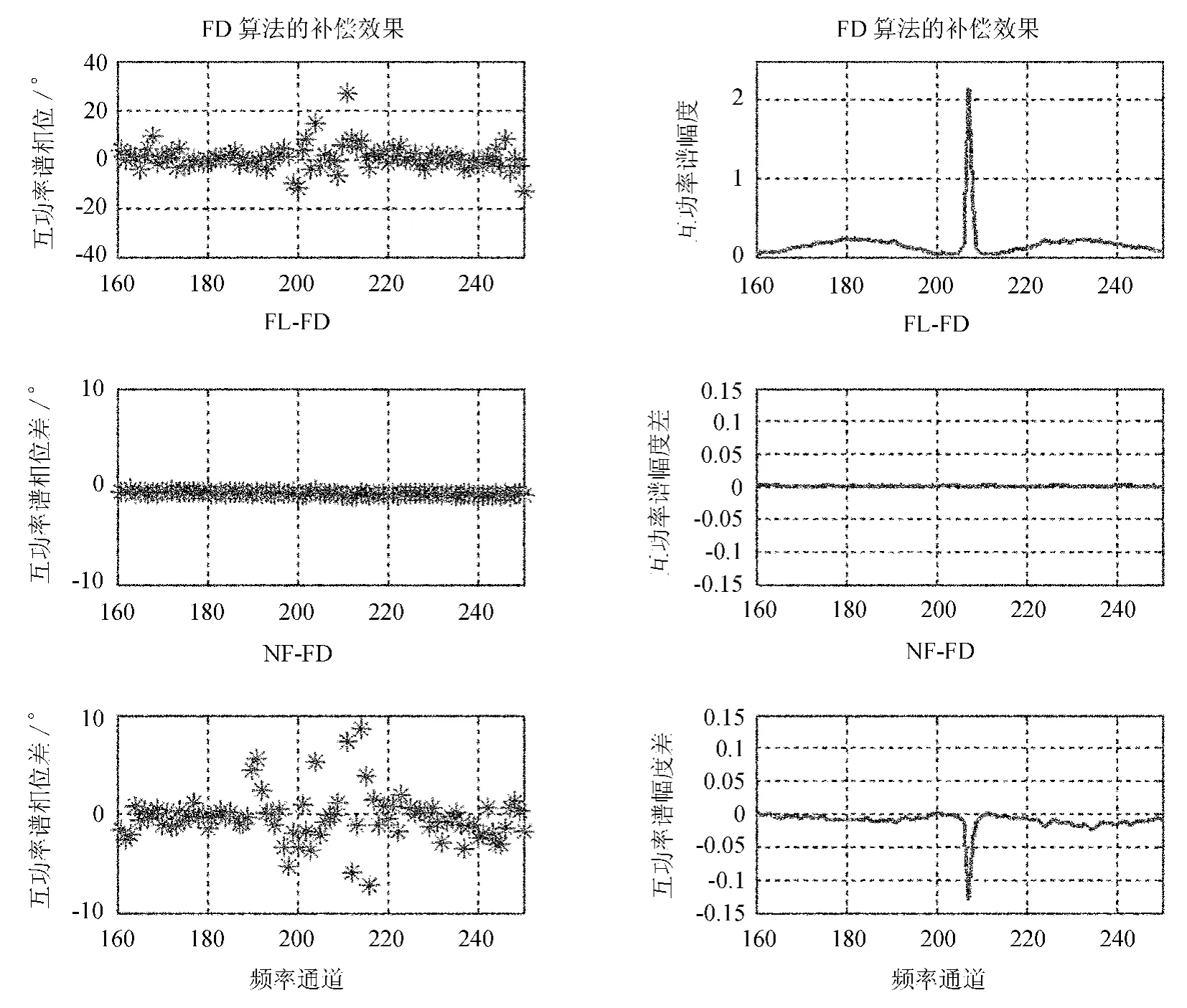
图5 上,频域补偿(FD)方法得到的“火星快车”遥测信号的上海-昆明基线的互相关相位谱和功率谱;中,基于Farrow结构的Lagrange插值滤波器组(FL)与频域补偿方法的谱的差值;下,未作小数时延补偿(NF)与频域补偿方法的谱的差值Fig.5 Up panels:phase and power of cross-correlation spectrum of telemetry signals from the MEX mission received by the Shanghai-Kunming baseline with the fractional delay compensation in the frequency domain.Middle panels:difference between cross-correlation spectra compensated by the F-L filter groups and frequency domain method.Bottom panels:difference between cross-correlation spectra compensated by the frequency domain method and without compensation
最后比较用3阶多项式15阶滤波器组和频域相位补偿的办法各自的计算量,以一个FFT周期1024点为例,利用前者,每计算一个采样点需要16次实数乘法和15次实数加法,所以整个FFT周期的采样点需要16384次实数乘法和15360次实数加法,对于在频域补偿的办法,需要两次FFT和1024次复数乘法,计算量达到40960次实数乘法和32786次实数加法。可见采用滤波器组的方法减少了一半的计算量。当时延量变化较快时,相当于需要较短的FFT周期,频域补偿方法的误差将增大,滤波器组算法的优势更加明显。
3 结论
本文讨论了小数时延补偿的几种常用的方法,并分析了各自的误差来源。时域的方法都是通过各种最小误差准则逼近理想系统获得的有限冲激响应,其中Lagrange插值的方法比较实用。频域线性相位加权的方法则是在时域上截断输入信号,并认为截断后的信号的频谱相当于整个输入信号的频谱,然后在此基础上线性相位加权。而Farrow滤波器组是一种在处理连续变化的时延量时方便调节滤波器系数的结构。仿真及分析表明,采用Farrow结构与Lagrange插值相结合的方法能方便处理数字信号中的延时问题,特别是小数时延量连续变化的情形。遥测阵信号处理结果显示,基于Farrow结构的Lagrange插值滤波器组在同等性能条件下比传统的频域补偿办法节省了一半的计算量。
[1]F Takahashi,T Kondo,Y Takahashi,et al.Very Long Baseline Interferometer [M].Ohmsha:IOS Press,1997.
[2]C W Farrow.A Continuously Variable Digital Delay Element[C]//IEEE International Symposium on Circuits and Systems,1988,3:2641-2645.
[3]Timo I Laakso,Vasa Valimaki,Matti Karjalainen,et al.Splitting the Unit Delay[C]//IEEE Signal Processing Magazine,1996,13(1):30-60.
[4]Juha Yli-Kaakinen,Tapio Saramaki.A Simplified Structure for FIR Filters with an Adjustable Fractional Delay[C]//IEEE International Symposium on Circuits and Systems,2007:3439-3442.
[5]舒逢春,张秀忠,陈中.长基线全频谱信号合成实验的初步结果[C]//2009年全国微波毫米波会议论文集.北京:电子工业出版社,2009:1261-1264.
猜你喜欢
数学小灵通·3-4年级(2022年5期)2022-06-01 07:41:04
小学生学习指导(中年级)(2021年5期)2021-05-18 08:07:58
小学生学习指导(中年级)(2021年5期)2021-05-18 08:07:56
小学生学习指导(中年级)(2021年3期)2021-04-06 09:12:04
西南石油大学学报(自然科学版)(2019年1期)2019-01-28 09:33:52
雷达学报(2018年3期)2018-07-18 02:41:34
电测与仪表(2016年10期)2016-04-12 00:26:24
电测与仪表(2016年14期)2016-04-11 12:32:48
火控雷达技术(2016年1期)2016-02-06 02:17:55
无线电通信技术(2015年3期)2015-12-23 11:37:02