一个不等式约束问题的SQP方法及其收敛性
2010-10-23 13:14解才先朱宁
汕头大学学报(自然科学版) 2010年1期
解才先,朱宁
(桂林电子科技大学数学与计算科学学院,广西桂林541004)
一个不等式约束问题的SQP方法及其收敛性
解才先,朱宁
(桂林电子科技大学数学与计算科学学院,广西桂林541004)
提出一个关于不等式约束问题的SQP算法,其效益函数为非可微精确罚函数,罚因子具有自动调节性.通过求解一辅助线性方程组,获得二阶修正步,并利用弧式搜索,建立了问题的一个可行下降算法.在一定的假设条件下,证明了算法是全局收敛的,并且具有超线性收敛速度.
SQP方法;弧式搜索;非可微精确罚函数;全局收敛性;超线性收敛性
0 引言
序列二次规划(SQP)算法是解非线性最优化问题的最有效方法之一,自上世纪70年代以来一直是非线性领域的一个研究热点[1-8].但是,如果不等式约束优化问题对应的二次子问题无可行解,或者它即使有解,但其解为无界时,则该方法失败或产生一个不收敛的点列.针对这个问题,研究者提出了一些解决方法.Zhang等[5]提出,当二次子问题无可行解或者有解但无界时,通过解一线性规划获得搜索方向,在一定假设条件下,获得了算法的全局收敛性.本文在文献[5]的基础上对算法进行了进一步的修正,通过求解一辅助线性方程组获得二阶修正步,并利用弧式搜索,在一些微弱假设条件下,证得单位步长是可以接受的,从而克服了Maratos效应,最终得出该算法还具有超线性收敛速度.
1 算法模型
本文考虑如下不等式约束优化问题:

其中f:Rn→R,g:Rn→Rm是二阶连续可微的.求解问题(1)的SQP方法是一个迭代算法,每一步迭代中其搜索方向dk是通过求解下列二次子问题所得:

这里Bk是一对称正定矩阵.迭代具有下列形式:xk+1=xk+tkdk,其中tk是通过对效益函数采取一维搜索所得的步长.令:

Φ(x)沿着d∈Rn的方向导数为:

其中I0(x)={j:gj(x)=Φ(x),j∈M∪{}0},通常来讲,Φ′(x;d)是不连续的.文献[6]提出了Φ′(x;d)的一个连续逼近Φ*(x;d),即:

这里,称式(3)为Φ(x)沿着方向d的伪方向导数,很容易证明Φ*(x;d)在Rn×Rn上是连续的[6].
引理1[7]∀x,d∈Rn,有Φ*(x;d)≥Φ′(x;d),且Φ*(x;·)为Rn上的凸函数.令:

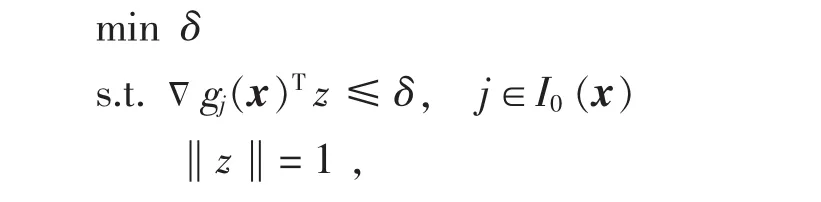
定义1 (广义MFCQ)[5]令x∈Fc,如果∃z∈Rn,‖z‖=1和δx>0,使得:成立,则称在x处满足广义MFCQ.
当x∈Fc,求解下列线性规划:
令d(x,B)为下面二次规划Q(x,B)的解:

这里B是一对称正定矩阵.
引理2i)若Q(x,B)是可行的,则式(5)有唯一解d(x,B).
ii)若d(x,B)为Q(x,B)的解,当且仅当存在一Lagrange乘子λ∈Rn,使得:

(S0)给定数据x1∈Rn,u∈(0,),B1对称正定,α1,0为初始步长,M1为对初始搜索方向dk范数的要求,σ,σ1分别为步长αk及Mk的增长倍数,α1,0>0,M1>0,σ>1,σ1>1,令k:=1;
(S1)令i:=0和tk,0=1,解式(2)计算dk,若式(2)不可行或xk∈Fc且‖dk‖>Mk,转(S5),若dk=0,停;
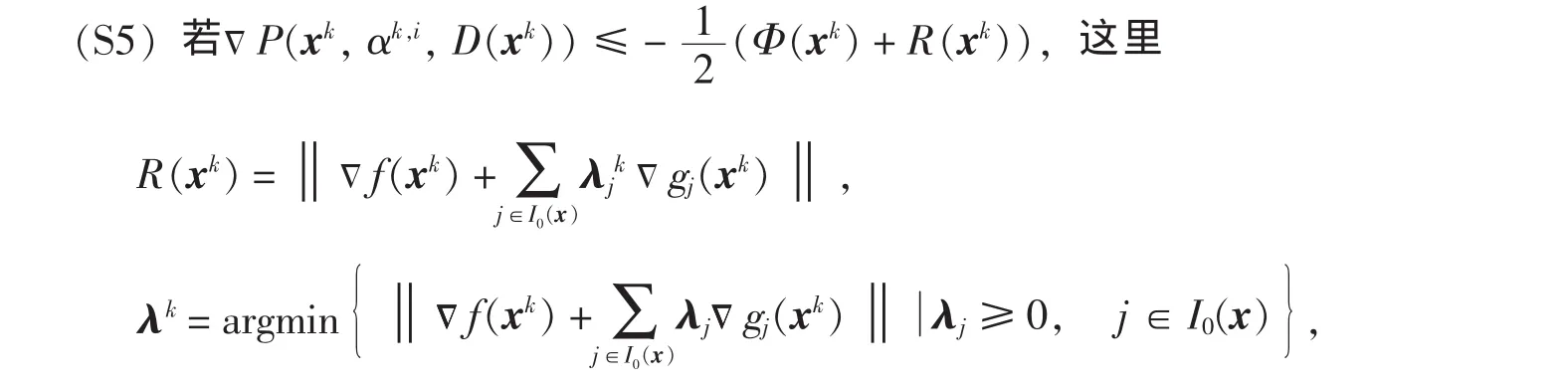
(S2)若ΔP(xk,αk,i,dk)≤转(S4);
(S3)αk,i:=σαk,i,若P(xk,αk,i)>P(x1,αk,i),转(S9),否则,转(S2).
转(S8),其中ωk表示搜索方向,这里为

转(S7);

转(S8),否则,i:=i+1,αk,i:=αk,i-1,选择tk,i:=转(S7);
(S8)令αk+1,0:=αk,i(为方便起见,记ik=i,αk=αk,i,tk=tk,i),xk+1=xk+tkωk,Mk+1:=Mk,利用BFGS校正[9]公式产生Bk+1,令k:=k+1,转(S1);
(S9)令αk,0:=αk,i,xk:=x1产生一个新的Bk,转(S1).
2 算法可行性
在以下的分析中,假设如下条件成立.
假设Ai){xk}是一有界序列;
ii)∀x∈F,积极约束的梯度线性无关;
iii)∀x∈Fc,广义MFCQ在x处成立;
iv)∀k,Bk为属于一对称正定矩阵的紧致集Σ中的有界序列,且存在常数0<b1≤b2<∞,使得b1‖dk‖2≤(dk)TBkdk≤b2‖dk‖2,∀dk∈Rn,k=1,2,…成立.
由命题1,容易得以下定理.
定理1若算法在(S1)终止于xk,则xk是问题(1)的K-T点.
命题2[8]若假设A成立,是一可行点,是一对称正定矩阵,则d(x,B)在(,)的一个领域内有定义且在()上连续.
命题3[5]算法不会在(S2)和(S3)之间无限循环.
命题4[5]算法不会在(S5)和(S6)之间无限循环.
命题5算法不会在(S4)之间无限循环.
证明由命题3的证明,当i充分大时,有αk,i=.现假设算法在(S4)之间无限循环,则必有tk,i→0,i→∞.而且

令i→∞,有:

由引理1和式(4),可得

但是由(S2),可得

结合式(9),这与0<u<1矛盾,证毕.
命题6[5]算法不会在(S7)之间无限循环.
3 超线性收敛性
为证算法具有超线性收敛性质,还需作如下假设.
假设Bi){xk}→;

由命题1,可得以下引理.
引理3(dk,λk)→(0,),在这里,)是问题(1)的K-T对,(dk,λk)是问题Q(xk,λk)的K-T对.
证明类似文献[10]中命题4.1.
引理5假设{xk}为算法在弧式搜索下产生的无穷序列.若假设A和假设B成立,则当k充分大时,步长tk=1.
证明由引理4和‖dk‖→0,k→∞.当k充分大时,可得:‖‖≤‖dk‖由假设A ii)可得,当k充分大时,≠0.
结合命题3和命题5,要证明当k充分大时步长tk=1,只要证明

成立即可.
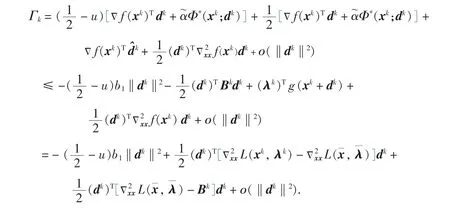
因为‖dk‖→0,k→∞和引理4,有:

由式(6)和引理3,可得:


由Bk的有界性,引理4以及的定义式(8),有:
由式(4)、(7)和(S2),知:

所以:
因为xk→¯,λk→和假设B(ii),可得:

因此当k充分大时:

定理2若引理5条件成立,则{xk}超线性收敛于x¯,即:
证明由文献[9]中定理12.7.5,有:

由引理5知,当k充分大时,tk=1成立.因此:

4 结语
在该算法下,类似于文献[5]可以很容易证明仅在假设A条件下,该算法具有全局收敛性.但是当x不可行时,如何构造一个更有效的线性规划来求解出搜索方向D(x),还有待于进一步研究.
[1] Che Jianren,Su Ke.A modified SQP method and its global convergence[J].Applied Mathematics and Computation,2007(186):945-951.
[2] Xue Wenjuan,Shen Chungen,Pu Dingguo.A penalty- function- free line search SQP method for nonlinear programming[J].Journal of Computational and Applied Mathematics,2009(228):313-325.
[3] Zhu Zhibin,Zhang Kecun,Jian Jinbao.An improved SQP algorithm for inequality constrained optimization[J].Mathematical Methods of Operations Research,2003(58):271-282
[4] Su Ke,Yu Zhensheng.Amodified SQP method with nonmonotone technique and its global convergence[J].Computers and Mathemativs with Applications,2009(57):240-247.
[5] Zhang Juliang,Zhang Xiangsun.A SQP method for inequality constrained optimization[J].Acta Mathematicae Applicatae Sinica,2002,18(1):77-84.
[6] Bazaraa M S,Goode J J.An algorithm for solving linearly constraint minimax problem[J].EJOR,1982(11):158-166.
[7] Zhou Guanglu.A modified SQP method and its global convergence[J].Journal of Global Optimization,1997(11):193-205.
[8] Facchinei F.Robust recursive quadratic programming algorithm model with global and superlinear convergence properties[J].JOTA,1997(92):543-579.
[9] 袁亚湘,孙文瑜.最优化理论与方法[M].北京:科学出版社,1997.
[10] DE Q Pantoja J F A.Mayne D Q.Exact penalty function algorithm with simple updating of the penalty parameter[J].JOTA,1991,69(3):441-467.
A SQP Method for Inequality Constrained Optimization and Its Convergence
XIE Cai-xian,ZHU Ning
(School of Mathematics and Computing Science,Guilin University of Electronic Technology,Guilin 541004,Guangxi,China)
In this paper,a SQP method,in which the merit function is nondifferentiable exactpenaltyfunction,ispresentedtosolveinequalityconstraint.Thepenaltyis adjusted automatically.The arc- search and the second- order correction,which is obtained by solving an auxiliary linear equation system,are used to obtain a feasible descent algorithm.Under some suitable assumptions,it is proved that the convergence of the algorithm is global as well as superlinear.
SQP method;arc- search;nondifferentiable exact penalty function;global convergence;superlinear convergence
O221.2
A
1001-4217(2010)01-0017-07
2009-11-05
解才先(1985-),男,山东临沂人,硕士研究生.研究方向:优化及应用.E-mail:xiecaixian1@163.com
猜你喜欢
数学物理学报(2022年4期)2022-08-22
成都信息工程大学学报(2021年5期)2021-12-30
中学生数理化·高一版(2021年2期)2021-03-19
数学物理学报(2020年3期)2020-07-27
中央民族大学学报(自然科学版)(2018年3期)2018-11-09
数学年刊A辑(中文版)(2015年4期)2015-10-30
应用数学与计算数学学报(2015年1期)2015-07-20
河北科技大学学报(2015年5期)2015-03-11
电测与仪表(2014年2期)2014-04-04