粗糙集属性约简在自动装填系统故障诊断方面的应用
2010-09-12 03:21王丹姚竹亭王立
电子测试 2010年9期
王丹,姚竹亭,王立
(机械工程与自动化学院,中北大学,山西,太原,030051)
0 引言
火炮的自动装填系统是火炮的关键子系统之一,其可靠性直接影响到系统的工作能力、使用效果和自身的安全。作为一个功能既独立,又与武器系统总体性能密切相关的部分,自动装填系统动作是否准确快捷,机构是否满足强度、刚度要求,其动态响应是否与总体性能相匹配,故障状态能否自检、容错等,将直接影响武器系统总体的战斗力与可靠性[1]。
本课题的研究目的,是针对自动装填系统易发生故障的点设置传感器,如输弹机故障、闭锁机构故障、抛壳机构故障、推弹机构故障等,将这些数据实时采集并进行逻辑分析,建立故障模式,由CPU判断这些数据的属性,如果是故障信息,需要判断是哪些点的故障,并输出控制命令。
1 自动装填系统组成及故障模式分析
1.1 自动装填系统组成
自动装填系统是一个复杂的机电系统,包括控制系统与机械系统。控制系统控制着机械部件的运动,而机械部件的工作又决定着电路的下一步状态。
装填机构控制系统的功能是采集各个部件相应的数据,分析处理,进而检测自动装填系统各个机构的动作状态,存储、记忆装填信息,控制自动装填机构正确动作,以完成装填任务。
机械部分是机械触点式的继电器逻辑电路,按下自动装弹按钮后,经中间继电器控制,执行部件开始工作,进而产生输出信号驱动电磁铁或者电机等外部机械部件运动,而这些外部机构的运动状态又是通过触点限位开关和机械位置式记忆装置等现场检测单元传入控制系统中,经过逻辑电路判断,输出控制命令,进行下一步状态的输入,从而完成自动装填系统的连续工作[2]。
自动装填系统的组成可由图1表示。
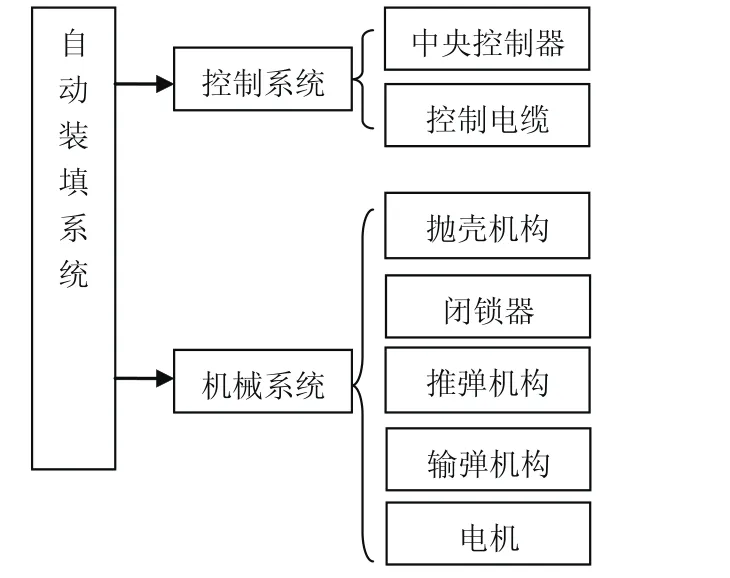
图1 自动装填系统组成
1.2 自动装填系统故障模式分析
本系统中所要处理的故障模式为旋转输弹机故障、闭锁机构故障、抛壳机构故障、推弹机构故障等,而每一故障模式又包含子故障,比如闭锁机构包括闭锁器不能工作、闭锁器工作时电机不能转动、闭锁器工作时电机不能制动等,经过这样划分,需要处理的故障点有20路数字量,但是在实际的工作过程中,可能有不需要检测的模块,因此,需要用粗糙集对输入控制系统的数据进行属性约简,用以滤除本环节不需要检测的故障模式,降低数据维数,简化数据量。
2 控制系统设计及功能实现
针对本系统所要处理的故障点数量以及故障模式,设计自动装填控制系统,本系统能够完成数据采集,并对采集的数据进行保存和处理[3-4]。
本控制系统硬件电路采用LPC2294作为中央处理器,外设电源电路、存储器扩展电路、USB接口电路、LCD显示驱动电路、CAN总线接口电路、20路通用GPIO口电路。控制电路框图如图2所示。
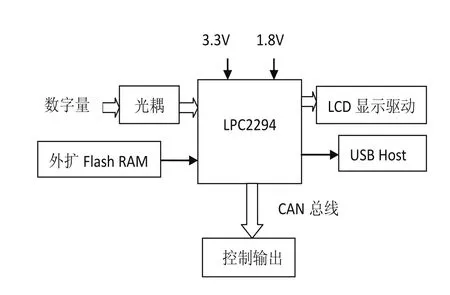
图2 控制电路框图
LPC2294需要使用两组电源,I/O口供电电源为3.3V,内核及片内外设供电电源为1.8V,所以系统中用9V电源适配器输入电压,通过LM7805将电压稳压至5V,再使用低压差电源芯片SGM2007-3.3、SGM2007-1.8输出3.3V及1.8V电压。
USB电路部分采用芯片ISP1161A1,该芯片支持USB Host和USB Device,硬件电路设计两路USB Host接口。这部分电路完成数据的存储功能,系统采集的数据首先存储于U盘或者移动硬盘,然后粗糙集对采集的数据进行属性约简处理,同时进行第二次数据的存储。USB接口也可以作为键盘、鼠标的接口。
LCD采用3.5寸屏TM035KDH03,由BIT1612完成LCD的驱动控制。LCD完成数据的实时显示,并显示数据的处理结果,故障数据用红色字体显示。
20路数字量与LPC2294之间连接有光耦,用以隔离噪声。
硬件电路完成数据采集,存储,故障诊断与控制命令发送等功能。20路数字量经光耦隔离噪声后,直接由ARM采集、存储,经内部控制算法完成故障诊断,由CAN总线发送得出的控制命令,以驱动执行机构动作。
3 粗糙集算法进行属性约简
3.1 粗糙集理论基础
所谓数据的属性约简[5-8],就是指任意两个对象的条件和决策属性值均相同的情况下,即存在重复记录,为了不必要的计算量,在规则抽取时应该将多余的重复记录删除。
设U为非空有限集合,称U为论域,R是U上的等价关系,K=(U,R)称为知识库。对于任意x,y∈U 且 (x ,y)∈R ,称对象x和y在K中是不可区分的,R被称为一个不可区分关系。
定义1:设R为U上的一族等价关系,U/R表示所有的等价类, [x]R表示包含元素x∈U 的R等价类。
给定知识库K=(U,R),对X ≠φ且x⊂U ,一个等价关系 R∈ ind(K),称
R−(x)={Y ∈U/R|Y⊆X }为集合X关于R的下近似
R−(x)={Y∈U/R|Y ∩X=φ}为集合X关于R的上近似
Bn=R−(x )−R−(x)为集合X关于R的边界区
R-(X)实际上是那些根据已有知识判断肯定属于X的U中的元素所组成的集合;R-(X)是那些根据知识R判断可能属于X的U中的元素所组成的集合;Bn是由那些根据知识R既不能判断肯定属于X又不能判断肯定属于U-X的U中的元素组成的集合。
由“属性-值”构成一张二维信息表,若At= C∪D,C和D分别成为条件属性和结果属性,这样就构成了一个特殊的信息表—决策表。
决策表可以看作是一族等价关系,决策表中并非所有的条件属性都是必要的,有些是多余的,去除这些属性不会影响原有的表达效果。
定义2:令R为一族等价关系,r∈R,如果ind (R)=ind(R −,{r})称r为R中可约去的,否则r为R中不可约去的。
定义3:若存在Q=P-r,Q⊆P,Q是独立的,满足ind(Q)=ind(P),则称Q为P的一个约简,用red(P)表示。
定义4:一族等价关系P可能有多个约简,全部约简的交集定义为P的核,记作CORE(P)。
决策表的简化就是化简表中的条件属性,即去除冗余的条件属性,在删除这些属性后不会影响原有的表达效果。
3.2 粗糙集属性约简实现
自动装填系统常见的故障有旋转输弹机不能解锁、解锁后不能旋转、未转到出弹口而停止、转到出弹口后不能制动;闭锁器不能工作、闭锁器工作时电机不能转动、闭锁器工作时电机不能制动;抛壳框架机构不能抬起、抛壳框架机构不能下落;推弹机构不能收链、推弹机构不能推弹;开窗机构、电机故障等共24种。
从200个测试数据中选取150个数据作为训练样本,其中 {T1,T2,T3,T4,T5,T6,……} 表示样本序号,λ表示故障现象S是否出现,在这里只考虑是否出现故障,不考虑其相关度。{S1,S2,S3,……S20}为条件属性,分别表示{旋转输弹机解锁,旋转输弹机解锁后是否能够旋转,旋转输弹机未转到出弹口是否停止,旋转输弹机转到出弹口后是否能制动……},D为决策属性,表示故障类型,{0,1,2,3,4,5,6}分别代表无故障状态和6种故障状态。
对条件属性进行相对约简,得到故障样本集合,如表1所示,将此故障集合作为样本写入CPU,这样,以后采集的数据,在进行属性约简之后,只需要与该故障样本集进行相应属性数据的比较,就可以判断相应属性的故障状态,完成故障诊断。
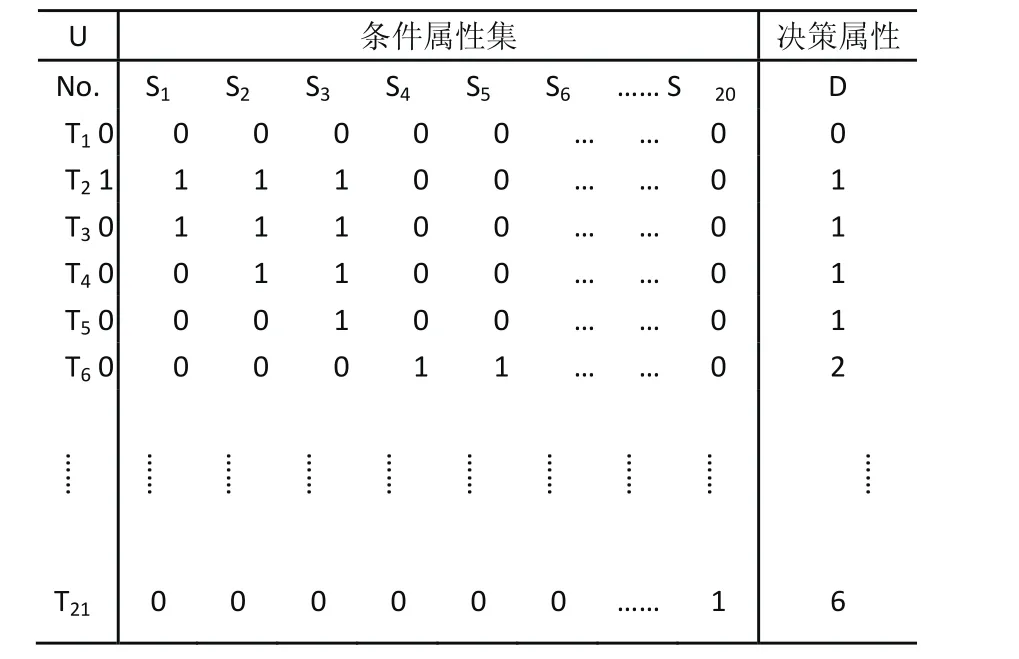
表1 最小条件属性集
由于整个系统是按照装填流程进行数据采集的,不同的流程对应不同的参数个数,因此可以对每个装填流程采集的数据进行属性约简,比如闭锁机构里有以下几个指标:
S1:闭锁器不能工作 , 0是 1否;S2:闭锁器工作时电机不能转动, 0是 1否;S3:闭锁器工作时电机不能制动, 0是 1否。控制系统采集20组数据,但是只有3组具有实际意义,由于在本环节内其余流程的数据不采集,所以其余17组数据都为0。可以用粗糙集对20个通道内的数据进行属性约简,以约去本环节不需要采集的17组数据。测试数据如表2所示。
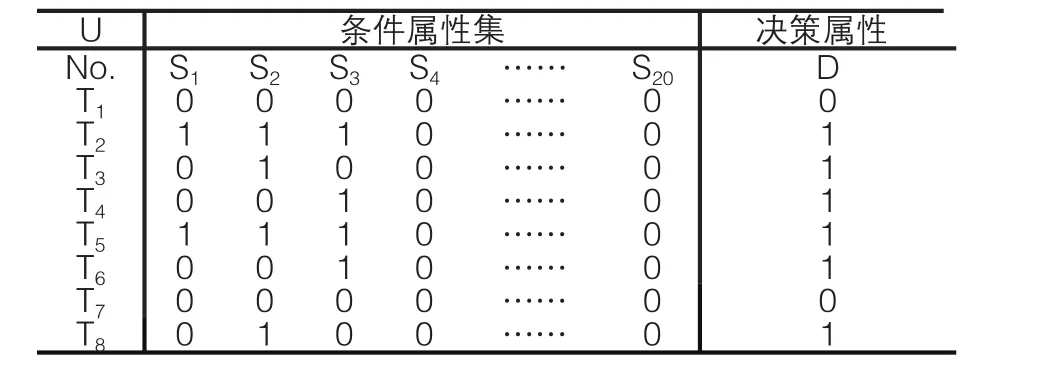
表2 测得结果
约简算法如下:
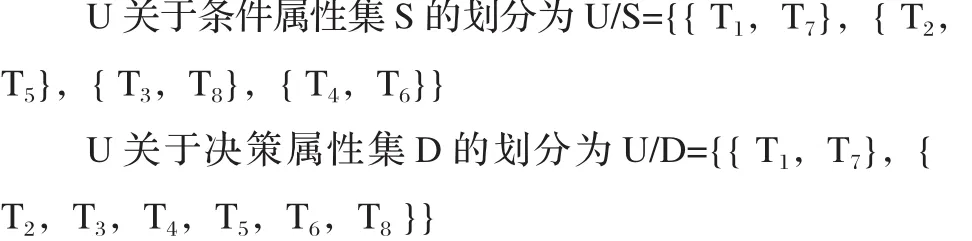

最后得到约简结果为S2,S3。
这样,对闭锁机构每次采集的数据,CPU只需要将S2,S3两组数据与样本数据的相应属性数据进行比较判断,就可以确定闭锁机构是否出现故障,避免了对20组数据的比较判断,大大减少了运算时间, 提高了系统的执行效率。
4 结束语
基于自动装填系统故障诊断的需要,设计了硬件系统,完成了数据的采集、存储、控制命令发送。由于不同环节需要采集的数据个数不同,条件属性值不同,所以采用粗糙集对输入的数据进行属性约简,避免每次故障模式判别都需要20组数据的比较。实验证明,CAN总线可以有效的发送控制命令,使控制系统动作;LCD数据可以实时更新,精确地显示数据处理的结果;粗糙集可以约去冗余信息,简化了需要故障判断的数据维数与个数,提高了诊断效率,增强了系统的可靠性。
[1]王国辉,王威,张振山,等.装甲车辆自动装弹机故障诊断研究[J].火炮发射与控制学报,2003(2):44-47.
[2]汪学渊.某自动装填装置故障诊断专家系统研究[D].太原:中北大学,2009.
[3]蔡田芳.基于ARM与μC/OSⅡ的GPRS数据终端[J].电子测试,2009(8):55-58.
[4]陈力,龙再川,刘永智.基于ARM7微控制器的USB数据采集系统设计[J].电子科技,2008(1):25-30.
[5]王彪,段禅伦,吴昊等.粗糙集与模糊集的研究应用[M].北京:电子工业出版社,2008.
[6]伞冶,叶玉玲.粗糙集理论及其在智能系统中的应用[J].智能系统学报,2007,2(2):40-45.
[7]刘玮,宋贵宝,陈小卫.基于粗糙集和神经网络的导弹故障诊断方法[J].海军航空工程学院学报,2009,24(2):214-216.
[8]冯志鹏,杜金莲,宋希庚,等.粗糙集与神经网络集成在故障诊断中的应用研究[J].大连理工大学学报,2003,43(1):70-75.
猜你喜欢
一重技术(2021年5期)2022-01-18
科教导刊·电子版(2021年6期)2021-05-06
成都信息工程大学学报(2019年2期)2019-08-28
电子制作(2018年10期)2018-08-04
自动化学报(2018年2期)2018-04-12
成都信息工程大学学报(2017年1期)2017-07-21
厦门理工学院学报(2016年3期)2016-11-10
广东石油化工学院学报(2016年3期)2016-05-17
重庆工商大学学报(自然科学版)(2015年10期)2015-12-28
振动、测试与诊断(2014年5期)2014-03-01