
全井眼地层微成像仪测井图像失真的恢复技术
2010-09-06 02:03孙建孟赖富强李茂兵于华伟
中国石油大学学报(自然科学版) 2010年2期
王 敏,孙建孟,赖富强,李茂兵,于华伟
(中国石油大学地球资源与信息学院,山东东营 257061)
全井眼地层微成像仪测井图像失真的恢复技术
王 敏,孙建孟,赖富强,李茂兵,于华伟
(中国石油大学地球资源与信息学院,山东东营 257061)
基于全井眼地层微成像仪(FM I)的仪器结构和测量原理,对井下仪器的运动状态进行分析,推导出描述仪器运动状态的微分方程,在此基础上对仪器的遇卡—解卡事件进行识别,然后利用卡尔曼滤波方法对井下仪器的运动状态作出最佳估计,得到原始采样数据的真实深度,最后利用 Akima插值算法对极板数据进行重采样并生成成像图像。结果表明:经过校正后生成的 FM I图像有效地消除了由于井下仪器的非匀速运动引起的拉伸、压缩、扭曲等图像失真现象,恢复了地层的原貌。该技术不仅适用于 FM I成像测井,同样适用于其他进行了加速度测量的成像测井,具有推广应用价值。
全井眼地层微成像仪;图像失真;卡尔曼滤波;Akima插值算法
全井眼地层微成像仪 (fullbore formation micro imager,FM I)测井以高分辨率和直观性的特点,在确定地层构造、地层沉积环境分析、薄层评价和识别裂缝等方面解决了常规测井资料难以解决的地质难题。但是,由于电缆的弹性和仪器在井下所受的各种阻滞作用,在测井过程中仪器很少作真正的匀速运动,使得井口记录的深度信息与仪器的真实深度存在较大偏差,测得的极板电扣曲线发生畸变,成像图像出现了严重的失真。为消除这一影响,需要利用成像测井仪测量的原始加速度、电缆深度、电缆张力等信息进行图像失真的恢复技术研究。高效曾[1-2]对地层倾角仪加速度计的结构原理、技术性能进行了阐述,毛志强[3]也针对地层倾角测井资料,计算了瞬时加速度,采用积分的办法进行了加速度校正,肖加奇等[4]用递推最小二乘法对微电阻率扫描测井进行速度与加速度校正,但没有将校正结果应用到失真图像恢复上。从表面上看,对加速度作两次积分即可得到井下仪器的真实深度位置,但由于测量过程和积分过程都存在不可忽略的误差,用直接积分来求得井下仪器的真实深度是不可靠的。卡尔曼滤波在时域范围内,用一个状态方程和一个量测方程来完整地描述线性动态过程,预测时具有无偏、稳定和最优的特点[5-7]。笔者利用卡尔曼滤波对 F M I成像测井图像进行校正。
1 加速度计的测量原理
电成像仪器的测斜、测方位系统由正交的三轴加速度计和正交的 3个磁力计组成。定义仪器轴向为 Z轴,一号极板的方向为仪器坐标系的 Y轴正向,与之垂直的方向为 X轴正向。加速度计分别测出仪器加速度在坐标系 3个轴上的分量。
加速度计常为石英挠性伺服加速度计,由表头和伺服回路组成。表头由检测质量组件、上激励环(力矩器磁钢)、下激励环 3部分组成(图 1)。检测质量组件是一石英玻璃制成的薄圆片,在其上用特殊工艺制成两个极薄的挠性支承,构成挠性支承摆片。两个力矩器线圈粘接在摆片上。同时摆片上还按一定图案蒸发镀上金膜以形成电容传感器的两个电容极板以及传感器引线和力矩器引线。磁钢、磁极片和上下激励环构成封闭的磁路,它们与检测质量摆片上的两个线圈组成推挽工作的永磁式力矩器。

图 1 石英挠性加速度计结构示意图Fig.1 Sketch map of structure of quartz flexible accelerometer
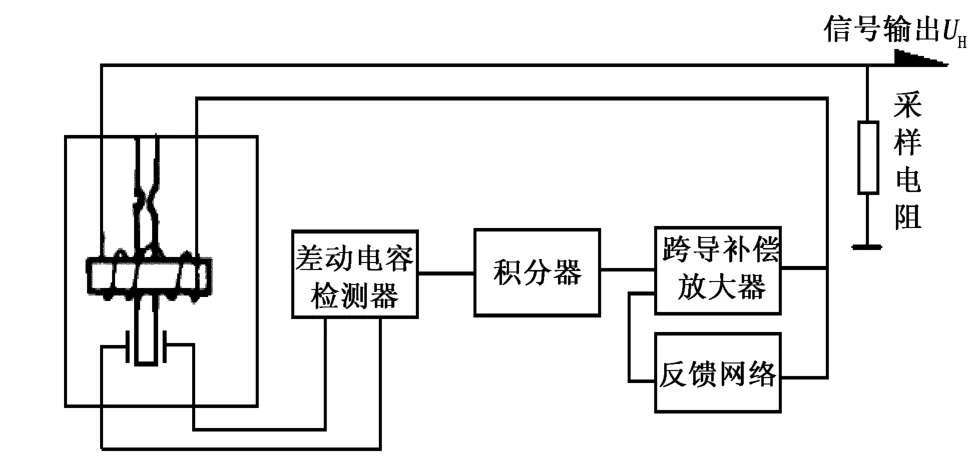
图 2 加速度计伺服回路方框图Fig.2 Servo loop of accelerometer
伺服电路由电容检测器、积分器、跨导补偿放大器和反馈网络组成(图 2)。当加速度计感受到加速度之后,摆片偏离中心位置,于是差动电容检测器输出一个与摆片位移成正比的直流电流,其极性取决于加速度的方向,此电流经积分器、跨导补偿放大器放大之后,为力矩器提供精确的再平衡电流,以使摆件处于力平衡状态。设平衡电流在采样电阻上的电压降为UH,则 ai=UH/K。其中,ai为加速度计感受的加速度;K为标尺因子,具有 U/g的量纲[1](其中,U为电压,V;g为重力加速度,m/s2)。
2 井下仪器运动状态的微分方程
当井下阻滞力均匀,地面电缆拉力稳定时,井下仪器作匀速运动,井下仪器和井口电缆同步,井下仪器的真实深度 (真深度)等于井口测深系统测得的深度(视深度),此时无须校正。由牛顿第二定律有

式中,m为井下系统的质量,在一个不太大的测量范围内可认为不变;γ为井下阻滞系数,这里假定井下系统所受的阻滞力是阻滞系数与运动速度的乘积; y0为电缆自由下垂时的长度;Δy0为匀速运动时的电缆伸长量;k为电缆的弹性系数。
当仪器作加速运动或遇卡的时候,电缆张力和伸长量变化较大,同样根据牛顿第二定律和简单受力分析得出[4]

根据方程(1)和方程(2)可分解为

这表明仪器作加速运动时,其运动是阻尼振动与匀速运动的合运动,阻尼振动由方程 (3)描述,匀速运动由方程(4),(5)描述。与之相应,井下仪器深度(y0+Δy0+Δy),(y0+Δy0)为井口测深系统测得的深度(视深度),Δy由方程(3)确定。
由于井下情况复杂,阻滞系数γ并不知道,故无法由方程(3)解出Δy,但可定性分析出该阻尼振动的振幅衰减因子为 e-γt/m,仪器在解卡时所做的阻尼振动的幅度将按指数规律衰减,也即井下仪器的深度误差的幅度将按指数规律减小。这一规律对后面处理遇卡—解卡事件具有指导作用。
3 遇卡—解卡识别
在井下仪器被卡停段,仪器的速度和加速度都变为零,但由于仪器速度要快速变为零,在开始卡停的一瞬间,加速度出现很大的负值;在解卡时,仪器速度快速增加,加速度出现很大的正值。电缆张力曲线在遇卡时逐渐增大,解卡时突然减小,在与加速度曲线在反映仪器遇卡过程中不同步,表现为滞后。电阻率曲线在仪器遇卡时一般呈直杠形,在仪器解卡过程中被压缩。
遇卡判断方法:当估计的速度小于某个较小的值(0.01 m/s),并且此后一段时间窗内,加速度方差小于某值(0.01 m/s2)且加速度绝对值的平均值接近于零,表明此时仪器开始处于遇卡状态,同时再附加两个检测量避免出现误判:(1)加速度曲线与零基线相交,即过零点;(2)仪器遇卡时,加速度会有一个负的、迅速衰减的振铃,即瞬态能量远大于后面位置。满足上述条件时,仪器进入遇卡状态,此时深度不变,速度为零。直到加速度在窗口内的平均值和方差不再满足条件时,再求加速度曲线过零点时间作为仪器解卡时刻。
图3是一典型遇卡井段特征曲线。在井段5513.3~5513.8,5517~5 517.8,5 518.4~5 519.5 m 3处仪器遇卡。值得说明的是电成像的仪器测斜系统和测量电极之间存在着一个深度差 (-0.546 1 m),故电阻率曲线和加速度曲线并没对齐。图 3最后一道是根据加速度、速度和电缆张力曲线识别出来的遇卡指示线,1代表遇卡,0代表正常。
4 卡尔曼滤波预测仪器真深度
4.1 数学模型的建立
描述井下仪器运动状态需要 3个量:仪器的深度(x)、速度 (v)和加速度 (a),故取仪器运动的状态向量 X(k)=(xk,vk,ak)T,由此可建立滤波的数学模型(状态方程)

式中,Xk,Xk-1均为 3维列向量,分别表示仪器在第k时刻和第 k-1时刻的状态,由匀加速定理可得出下式:

设在第 k时刻对 Xk的前m个分量同时进行一次测量,得到测量数据向量 Zk。Zk的数学模型 (量测方程)为 Zk=HkXk+Vk。其中,Zk为 m维列向量,表示在第 k时刻 Xk的测量值;Vk为量测噪声,也是m维列向量,常被假设为白噪声序列;Hk是m ×n阶量测矩阵,反映从状态变量 Xk到量测 Zk的转换关系。

4.2 滤波器模型[8-10]
卡尔曼滤波器是在线性最小均方误差准则下,随机信号的最优递归估计器,其表达式为

式中,^Xk,^Xk-1分别为 Xk,Xk-1的估计值。Fk-1为 n ×n阶滤波器转移矩阵,又叫反馈矩阵。Kk为 n×n阶滤波器前向增益矩阵。
按照无偏、最小均方误差估计准则,可以得到以下协方差矩阵 Pk表达式:

其中
由式 (10)~(12)构成卡尔曼滤波器

卡尔曼最优滤波方程组的求解过程是一个递推过程,它依次由 ^Xk-1求出 ^Xk。
4.3 应用卡尔曼滤波方法对失真图像进行恢复
应用卡尔曼滤波方法对失真图像进行恢复要经过 3个步骤:第一步,将按电缆深度均匀采样的电成像数据转换到等时间隔均匀采样数据;第二步,采用卡尔曼滤波方法预测仪器真深度;第三步,利用Akima分段三次多项式插值算法[11]对滤波后的极板数据进行重采样并重新生成 FM I图像。
(1)深时转换。将等深度间隔采样的加速度数据转换到等时间间隔的均匀采样数据,如图 4所示。
(2)预测仪器真深度。经过试验研究,最优化滤波方程组式(8)~(13)的Q,R和 P,X初值确定如下:


图 4 加速度曲线的深时转换Fig.4 Depth-ti me conversion of acceleration curve
b=Cov[a],即加速度 a的方差。


图 5 用卡尔曼滤波方法预测深度程序运行框图Fig.5 Program di agram of true depth esti mation by Kalman filtering
上述滤波方法程序实现如图 5所示。滤波实现过程中,动态噪声W和量测噪声 V是随机出现的,一般认为是服从均值为零正态分布的高斯白噪声,由前面的数学模型与物理分析可知,W和V方差Q和 R对应着阻尼振动幅度,Q越小意味着动态过程噪声在信号模型中起的作用较小,滤波估计值依赖外推预测值的比重加大,R变小代表测量过程中引入的量测噪声变小,使信号的滤波估计值依赖实测值的比重加大,故可以根据实际情况调节滤波噪声参数Q,R的大小。
(3)利用卡尔曼滤波预测出来的真深度曲线,对极板数据、方位和井径曲线进行拉伸或压缩校正,并对畸变曲线进行重采样,本文中采用 Aki ma分段三次多项式插值[11]方法。
5 应用效果分析

图 6 FM I失真图像恢复成果图Fig.6 Recovered result of FM I distortion i mage
在微软的.NET平台上开发了 FM I成像测井图像失真的恢复处理软件,对新疆油田多口井的 FM I资料进行了处理,图 6是新疆 sha67井校正成果图。从图中第 3道原始图像上可以看出,5.510~5.520 km井段内出现多处垂直拉伸、压缩和扭曲现象,掩盖了原有的地层特征。利用编制软件中遇卡探测、卡尔曼滤波预测真深度、重采样模块处理后生成的图像有效地恢复了原始图像的失真现象,即从校正后图像可看出,5.512~5.513 km井段错动的天然斜交缝、5.517~5.518 km井段被压缩扭曲的地层、5.519~5.519 4 km井段被拉伸的水平裂缝均得到了恢复,还原了该深度段地层的真实情况。与图中第 5道斯伦贝谢的处理图像对比分析,取得一致的恢复效果。
通过校正前后的图像对比,证明了该软件很好地消除了井下仪器非匀速运动 (包括遇卡)造成的图像压缩、拉伸、扭曲等失真现象。
6 结 论
(1)利用 FM I成像测井仪加速度计辅助测量的原始信息,通过遇卡探测、卡尔曼滤波预测真深度、重采样处理,能够有效地恢复由仪器非匀速运动(包括遇卡)引起的 FM I图像拉伸、压缩、扭曲等失真现象,还原了地层面貌。
(2)井下仪器的运动受许多随机因素控制,且加速度测量也存在一定的误差,一般来说不可能进行严格意义上的完全恢复,但基于统计和误差分析的卡尔曼滤波方法切实可行。
(3)本文中提出的图像失真的恢复技术,达到斯伦贝谢的处理水平,不仅适用于 FM I成像测井,同样适用于其他进行了加速度测量的成像测井,具有推广价值。
[1] 高效曾.用于地层倾角仪的加速计和磁力计[J].地球物理测井,1989,13(6):20-25.
GAO Xiao-zeng.Accelerometer and magnetometer in dipmeter[J].GeophysicalWellLogging,1989,13(6):20 -25.
[2] 高效曾.地层倾角测井的地面数据采集和实时处理[J].测井技术,1992,16(5):354-360.
GAO Xiao-zeng.Data acquisition and real time data processing of dip logs[J].Well Logging Technology,1992, 16(5):354-360.
[3] 毛志强.现代地层倾角测井速度校正方法[J].江汉石油学院学报,1991,13(1):38-43.
MAO Zhi-qiang.A method for logging speed correction in modern diplog[J].Journal of Jianghan Petroleum Institute,1991,13(1):38-43.
[4] 肖加奇,陈文荣,王哲然.用递推最小二乘法对微电阻率扫描测井进行速度与加速度校正[J].测井技术, 1994,18(3):204-211.
XI AO Jia-qi,CHEN Wen-rong,WANG Zhe-ran,et al.The speed and acceleration correction of micro resistivity scanner logs with recursive least square algorithm [J].WellLogging Technology,1994,18(3):204-211.
[5] 陈爱新,钟兴水.卡尔曼滤波在电阻率测井数据处理中的应用[J].物探化探计算技术,1998,20(2):97-101.
CHEN Ai-xin,ZHONG Xing-shui.Application of Kalman filtering to the electric log data processing[J]. Computing techniques for Geophysical and Geochemical Exploration,1998,20(2):97-101.
[6] RUCKEBUSCH G A.Kalman filtering approach to natural gamma ray spectroscopy in well logging[J]. IEEE Transactions on Automatic Control,1981,AC-28(3): 373-379.
[7] CHEN G,CHU IC K.A modified adaptive Kalman filter for real-time applications[J]. IEEE Trans-AES, 1991,28:125-129.
[8] XI A Q J,RAO M,YI NG Y Q.Adaptive fading kalman filterwith an application[J].Automatica,1994,30:1331 -1335.
[9] LYLEW D,W I L I AMS D M.Deconvolution of well data innovations approach[J].The Log Analyst,28(3):330 -337.
[10] 蒋志凯.数字滤波与卡尔曼滤波[M].北京:中国科学技术出版社,1993:82-123.
[11] 邵才瑞.井筒数据的 Akima插值重采样方法 [J].测井技术,2004,28(2):112-114.
SHAO Cai-rui.An Akima interpolation method for borehole data resampling[J].WellLogging Technology, 2004,28(2):112-114.
(编辑 修荣荣)
Recovery technology of distorted i mage from fullbore formation m icro i mager
WANGMin,SUN Jian-meng,LA I Fu-qiang,L IMao-bing,YU Hua-wei
(College of Geo-Resources and Info rm ation in China University of Petroleum,Dongying257061,China)
The movement status of down-hole equipment was analysed on basis of the equipment structure and the measurement principle of fullbore for mation micro imager(FM I),and the differential equation which describes the movement status of device was deduced.The stick-unstick eventswere identified on basis of this.Then according to Kal man filtering,the best esti mation of the motion status of down-hole equipmentwasmade and the real depth of original sampling data was obtained. At last,through the method ofAkima interpolation,the data of padswere resampled and the corrected F M I image was generated.The results show that the distorted F M I imagewas corrected and the real features of for mation regainwere recovered.This technology applies not only to F M I logging,but also to the other image logging and is of great value to promote.
fullbore for mation micro i mager(FM I);image distortion;Kalman filtering;Akiam interpolation
P 631.811
A
10.3969/j.issn.1673-5005.2010.02.009
1673-5005(2010)02-0047-05
2009-04-19
中国海洋石油总公司重点攻关项目 (jsb07yf001)
王敏(1982-),男(汉族),山东博兴人,博士研究生,从事成像测井资料处理及解释工作。
猜你喜欢
测井技术(2022年3期)2022-11-25
北京航空航天大学学报(2022年8期)2022-08-31
中国惯性技术学报(2019年1期)2019-05-21
电子制作(2019年23期)2019-02-23
北京航空航天大学学报(2017年9期)2017-12-18
中国惯性技术学报(2017年1期)2017-06-09
中国惯性技术学报(2017年1期)2017-06-09
探测与控制学报(2015年4期)2015-12-15
中国煤层气(2015年4期)2015-08-22
中国质量与标准导报(2015年2期)2015-02-28
