基于空间矢量算法的永磁交流伺服控制器设计
2010-08-29 13:28:06赵志堂张存山巍然然
山东理工大学学报(自然科学版) 2010年4期
赵志堂,张存山,巍然然
(山东理工大学,电气与电子工程学院,山东 淄博 255049)
永磁交流伺服电机具有结构简单,功率密度大,效率高,控制系统简单等特点[1].随着现代化工业的不断发展,交流伺服控制系统的应用越来越广泛,对其性能的要求也越来越高,要求伺服控制系统具有高速度、高精度、高可靠性和高抗干扰能力.空间矢量脉冲调制应用于交流电机数字化控制具有谐波分量少、开关损耗低、电压利用率高等优点,从而降低了伺服电机的转矩脉动,提高了交流调速性能[2],因而得到了广泛的应用.本文基于空间矢量控制算法,利用电流、转速、位置三闭环控制方式对永磁同步电机进行速度和位置控制.
1 PMSM的矢量控制原理
空间矢量控制方法是根据电机统一控制理论,把三相静止坐标系下的定子相电压Ua、Ub、Uc,通过Clark变换等效到两相静止坐标系下的交流电压Uα、Uβ,从而产生相互独立的转矩电流iα和励磁电流iβ.分别控制iα、iβ,即实现了对励磁和转矩的独立控制[3].三种坐标系的相互关系如图1所示.其中θe为转子磁链位置角.

图1 三种坐标的相互关系
永磁交流电机的矢量控制是建立在坐标变换的基础上的,系统电流环中,检测到的三相电流进行Clark变换和Park变换并反馈到系统,再经过Clark逆变换从而得到id、iq.
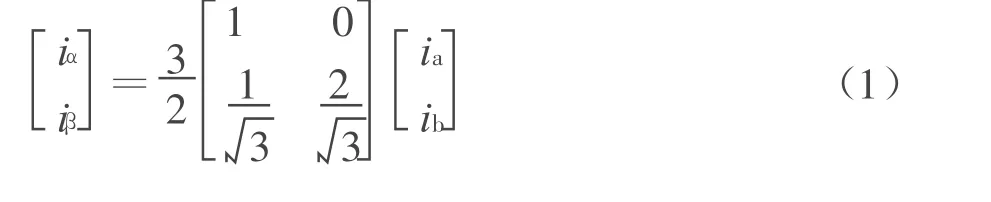
Clark变化就是由三相坐标变换到两相静止坐标,对于三相对称绕组有ia+ib+ic=0,由图1可知Clark变换矩阵为
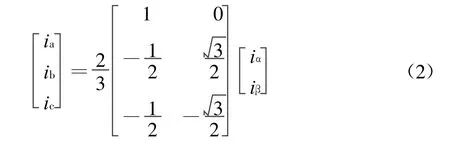
Clark变换的逆变换矩阵为
Park变化就是由两相静止坐标变换到两相旋转坐标,Park变化矩阵为

Park变化的逆变换矩阵为

2 控制系统硬件电路设计
永磁交流伺服控制系统由功率电路、DSP及其外围电路和检测电路三部分构成.功率主电路包括整流电路、IPM逆变电路和驱动隔离电路.检测电路由电流检测电路、过欠压检测和转子位置、速度检测等部分组成.永磁交流伺服控制系统硬件结构如图2所示.
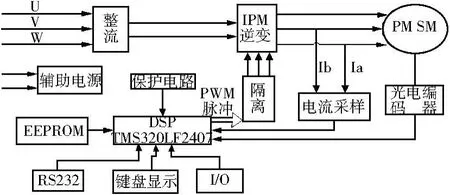
图2 系统硬件结构总体框图
本文主要对功率电路和检测电路进行设计,DSP及其外围电路采用闻亭公司的DSP-2407A控制板.
2.1 功率主电路设计
2.1.1 整流电路设计
整流电路的作用是将三相交流电整流,再经过电容滤波转换成直流电,为逆变器提供恒压源.本系统中整流电路采用富士公司的6R130-1200三相整流桥,构成三相全波整流电路,额定电压1200 V,额定电流为30 A.整流桥输出的电压是脉动的直流电压,需要经过滤波.
滤波电容在电路中具有稳压、滤除整流后的电压纹波、整流电路和逆变电路之间去耦合以及为电动机提供无功功率的作用.电容C要选择容量较大的电解电容.电容C容量可由公式(1)计算得到[4].

2.1.2 IPM逆变电路
逆变电路的功能是根据PWM控制信号将整流后的直流电变换成频率、相位和幅值均可调的交流电.逆变电路中,开关器件的开关损耗,饱和压降及通断速度对整个电路的影响很大.本系统中选用的是三菱公司的智能功率模块(IPM)PS22056.这样就大大简化了电路.
PS22056采用三菱低损耗第四代平板型IGBT;额定值为25A/1200 V;可采用自举电路实现单电源供电,内置控制和保护功能(可实现控制电压欠压保护和短路保护);内部集成了1200 V高压芯片(HVIC),模块可不通过光耦直接与控制器相连[5].
虽然模块内部集成了专用的HVIC,其控制端可与CUP端子直接相连.但由于系统的控制板和主电路板是分开的,为了避免受到干扰,采用了光耦隔离的连接方式.光耦采用高速、高共模比的IPM专用光耦HCPL-4504.由于IPM是高电平导通的,为防止由于线路故障而引起IGBT的误导通光耦要连接反相器.光耦隔离电路如图3所示.

图3 光耦隔离电路
三相逆变电路的驱动电路需要四路隔离的电源.PS22056只需要一个15 V电源用自举方式获得四路浮动的15 V电源,这就降低了系统的复杂性,提高了可靠性.自举电路由R、C1、D组成,R、C1、D的选择方法如下[5]:

式中:Δ VDB为放电电压,取电压不低于14 V,则Δ VDB=15 V-14 V=1 V;T1为IGBT最大通态脉宽,PWM频率10kHz,则T1=100 μ s;IDB为IC的驱动电流,PS22056最大驱动电流为2 mA;电容C1的计算值为0.2 μ F,为增加系统的可靠性,选取电容为10 μ F/50 V.

式中:t0为下桥臂IGBT最小脉冲宽度,死区时间为3 μ s,t0=3 μ s;C1为电容的计算值,C1=0.2 μ F.
R计算得15 Ψ,取R为10 Ψ.
D选取RF107,其参数为1 A/1000 V.
2.2 检测电路设计
2.2.1 电流检测电路的设计
在永磁同步电机的伺服矢量控制中,控制器要实时采集绕组中的电流,以实现电流控制和电流保护.电流检测可以采用采样电阻或霍尔电流传感器等方法.系统采用Allegro公司的ACS704ELC-015霍尔电流传感器,它具有1.5 mΨ内部传导电阻;5 V单电源供电;电压输出等特点.电路如图4所示.
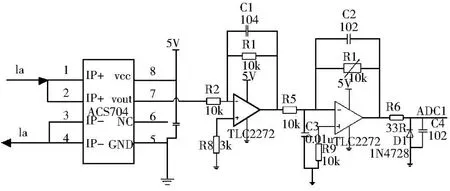
图4 电流检测电路
2.2.2 位置和速度检测电路
在永磁同步伺服电机的控制过程中,需要实时的得到电机转子的位置和速度信息.增量式光电编码器具有高分辨率,高性价比等优点,本系统中采用分辨率为2500脉冲/转的增量式光电编码器安装在电机轴上.为了保证脉冲数据传输的稳定性,采用了差分驱动方式.在脉冲信号接收端,采用差分接受.然后通过光电隔离输入到DSP的正交编码单元.
2.2.3 故障保护电路设计
为确保系统安全稳定的工作,系统设置了过压,欠压和IPM故障保护等电路.IMP输出的故障信号和从主电路输出的过压、欠压信号经过或门电路,然后送入DSP的PDPINTA .当PDPINTA 引脚接受到低电平信号时,DSP立即封锁PWM输出.从而对硬件系统实施保护.
3 系统软件设计
控制系统软件部分主要由主程序和中断程序组成.流程图如图5和图6所示.主程序主要完成系统的初始化,I/O接口控制信号,DSP内部各个控制寄存器的设置等[6].中断程序完成电流检测,并把电流转换到两相旋转坐标系下,另外中断程序还要完成速度计算、位置计算、速度控制、位置控制、电流控制和空间PWM脉冲计算.
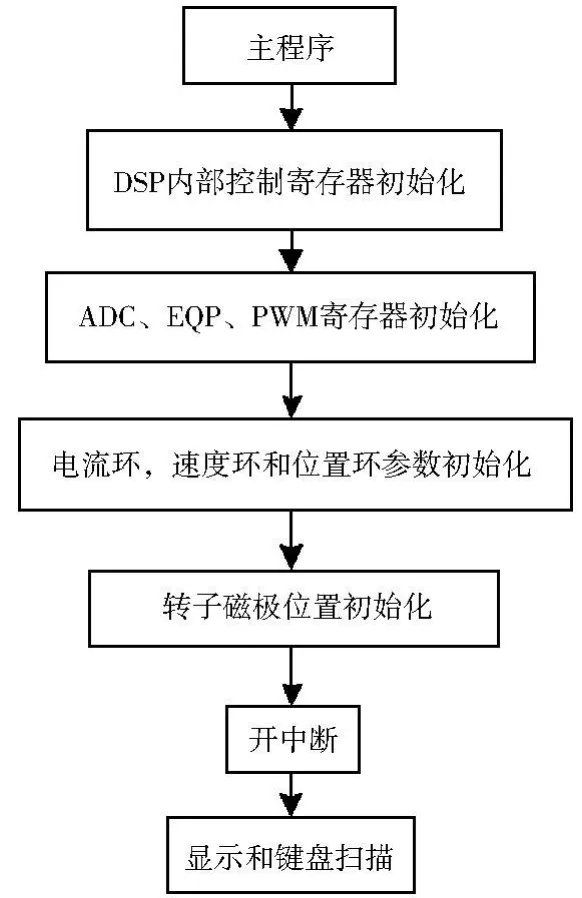
图5 主程序流程图
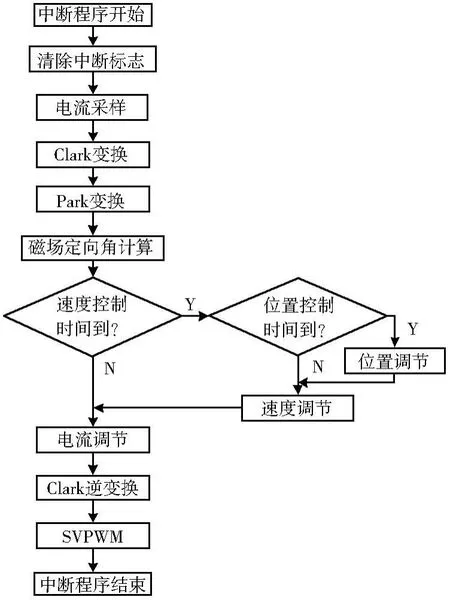
图6 中断程序流程图
4 实验
实验采用的永磁交流伺服电机的额定功率为2.3kW,额定电流为8.5A,额定转速为1500r/min,额定转矩为15N·m,定子电感为2.3mH,定子电阻为0.53Ψ,利用所设计系统采用矢量控制进行实验.单个PWM周期产生的SVPWM波形如图7所示,带有死区的同一桥臂上下半桥的驱动波形如图8所示,a、b两相的相电流波形如图9所示.由图7可知矢量控制波形与理论波形一致,由图9可知电流波形接近正弦波,但是电流存在畸变,这可能是由电流检测误差、SVPWM存在死区时间而产生的.
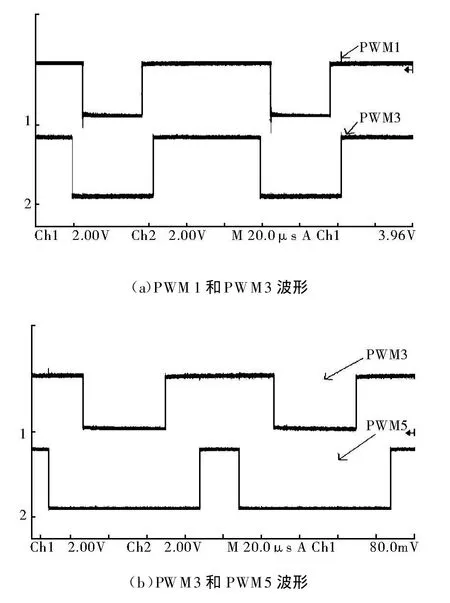
图7 单周期SVPWM波形
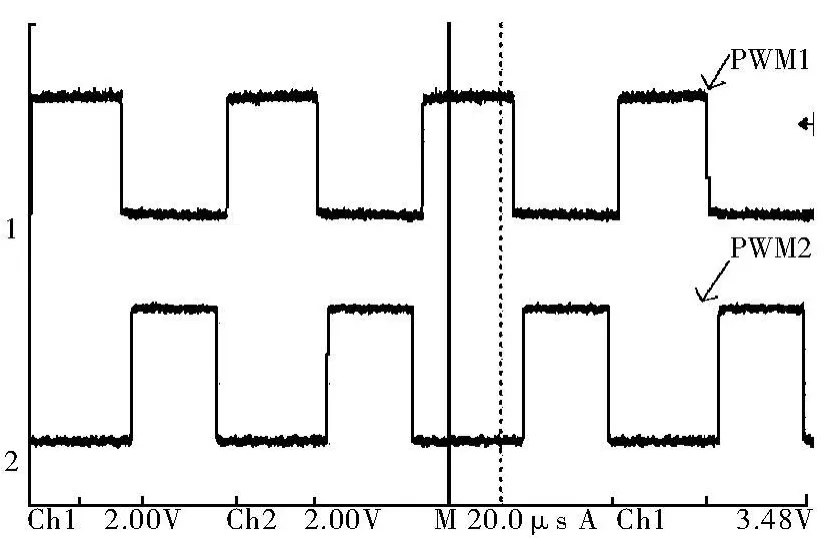
图8 PWM1和PWM2波形
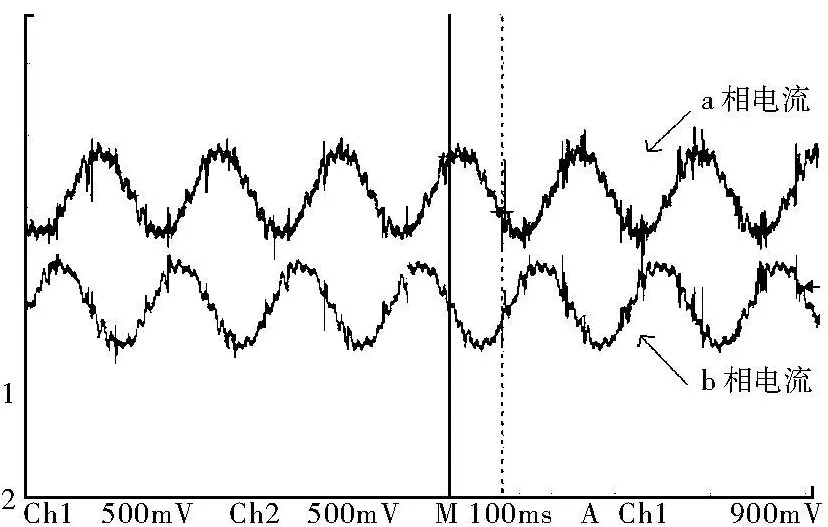
图9 a、b两相的相电流波形
5 结束语
利用DSP芯片实时高效的处理能力,设计了永磁交流伺服电机控制系统,并进行了实验,结果表明系统设计方法是正确可行的,采用空间矢量控制算法能够实现电机的转矩、转速和位置的精确控制.
[1]陈荣.永磁同步电机伺服系统研究[D].南京:南京航空航天大学.2004.
[2]陈荣.交流永磁同步伺服系统的现状与发展[J].电气时代,2005(9):104-107.
[3]Field Oriented Control of 3-Phase AC-Motors:BPRA073[Z],T exas:1998.
[4]盛建科,贾正春,许强.交流伺服系统主电路参数的研究[J].伺服系统,2005,35(5):10-12.
[5]三菱公司.第四代DIP—IPM应用手册[EB/OL].http://www.Keling.com.cn,2000-01-11.
[6]Texas Instruments,Digital Motor Control software Library:SPRU485A[Z],T exas:2001.
猜你喜欢
中学生数理化·高一版(2021年11期)2021-09-05 12:21:24
上海大中型电机(2021年2期)2021-07-21 03:01:32
微特电机(2020年11期)2020-12-30 19:42:32
防爆电机(2020年6期)2020-12-14 07:16:54
电子制作(2018年17期)2018-09-28 01:57:00
通信电源技术(2018年3期)2018-06-26 06:33:36
现代防御技术(2016年1期)2016-06-01 12:13:28
工业设计(2016年6期)2016-04-17 06:42:53
新高考·高一物理(2016年1期)2016-03-05 22:47:39
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54