
基于S-粗集理论的交通控制器的设计与仿真
2010-08-27 08:18郭志林孙艳敏
海南师范大学学报(自然科学版) 2010年2期
郭志林,郭 艳,孙艳敏,郭 黎
(商丘师范学院 数学系,河南 商丘 476000)
基于S-粗集理论的交通控制器的设计与仿真
郭志林,郭 艳,孙艳敏,郭 黎
(商丘师范学院 数学系,河南 商丘 476000)
综合车辆密度和平均速度二者的信息,引入了阻塞参数,提出了一种基于S-粗集理论的变相位交通信号控制方法,利用粗集理论的知识推理,把粗糙集理论融入常规的模糊推理,减少了控制器的输入量,降低了控制器的设计难度,实现了城市交通的粗模糊控制.
S-粗集;交通控制;阻塞参数;变相位;系统仿真
传统的城市交通控制通常采用定时控制方案,预先人为分配好红绿灯的保持时间,其目的首先是协调好车辆的通行,其次是尽量减少车辆的延误.由于城市交通系统具有随机性、不确定性和相当的复杂性,很难用精确的数学模型来描述.模糊控制能提供许多非智能控制方法无法取代的效果[1-2].近年来,模糊交通控制已成为交通信号控制的主流方向之一,国内外很多学者都进行了此类研究[3-5].但是,模糊控制也存在许多问题,例如,隶属度函数的选取,模糊控制规则的形成等问题都大量渗杂着操作者的主观因素,这些因素都能对整个控制过程产生影响.
S-粗集[6-8]是研究系统动态近似特性、知识挖掘和知识发现的一个新的理论工具,它是Pawlak粗集[9]的一般形式.适用于从大量动态的、模糊的原始数据集中抽象出有用的数据,并能客观的推导出规则.目前,S-粗集理论已在数据挖掘、智能控制、决策分析、故障诊断等领域取得了令人鼓舞的成果[10-11],但在交通领域的应用尚未见报道.本文在文献[12]和[13]的基础上将S-粗集和模糊集结合起来,提出了一种基于S-粗集理论的动态调整各相位最大绿灯时间的变相序粗模糊控制方法,这种方法在输入变量的选择上将交叉路口及其相邻的交叉路口处的车辆密度和平均速度均考虑在内,首先以相位的阻塞度作为模糊输入,通过第I级相位切换模糊控制器确定当前相位和下一相位,再利用当前相位和下一相位的阻塞度通过粗模糊控制器来确定当前相位的绿灯延时,把粗糙集理论融入常规的模糊建模过程,充分利用粗糙集的属性约简功能对决策表进行简化,进而挖掘出数据隐含的决策规则,使控制规则的确定不存在主观因素的影响,获取的控制规则更具客观性.
约定:在本文的讨论中,U是一个有限论域,R是U上的等价关系,[x]R是U上的R-等价类,F是定义在U上的元素迁移族.
1 S-粗集的基本概念
1.1 S-粗集及上、下近似
定义1[6]给定U,F是定义在U上的元素迁移族,F={f1,f2,…,fn}.称X*⊂U是U上的单向奇异集合(one direction singular sets),简称单向S-集合,如果f∈F,而且

称Xf是X⊂U的扩张,如果

定义2[6]设X*是U上的单向S-集合,称(R,F)0(X*)是X*的下近似,如果
称集合对((R,F)0(X*),(R,F)0(X*))是 X*⊂U的单向奇异-粗集(one direction singular rough sets),简称单向S-粗集.
称bnR(X*)是X*⊂U的R边界,如果
bnR(X*)=(R,F)0(X*)-(R,F)0(X*).
定义3[6]给定U,F是定义在U上的元素迁移族,称X**⊂U是U上的双向奇异集合(two direction singular sets),简称双向S-集合,如果f,f∈F,而且

定义4[6]设X**是U上的双向S-集合,称(R,F)0(X**)是X**的下近似,如果

称集合对((R,F)0(X**),(R,F)0(X**))是 X**⊂U的双向奇异粗集(two direction singular rough sets),简称双向S-粗集.
称bnR(X**)是X**⊂U的边界,而且

为方便见,以下不加区别地用X0表示单向S-集合X*或双向S-集合X**,简称为S-集合,用集合对((R,F)0(X),(R,F)0(X))表示单向 S-粗集((R,F)0(X*),(R,F)0(X*))或双向 S-粗集((R,F)0(X**),(R,F)0(X**)),简称为S-粗集.
1.2知识表达系统
定义5[10]四元组S=(U,A,V,f)是一个知识表达系统,其中U={x1,x2,…,xm}表示对象的非空有限集合,称为论域;A={a1,a2,…,an}表示属性的非空有限集合,包括条件属性和决策属性;V=∪Va,Va是属性a的值域;f∶U×A→V是一个信
a∈A息函数,它为每个对象的每个属性赋予一个信息值,即∀a∈A,x∈U,f(x,a)∈Va.
定义6[14]对任意属性集B⊂A,存在对象xi,xj∈U,∀b∈B,如果满足b(xi)=b(xj),则称对象xi,xj对于属性集B不可分辨(indiscernibility),记作Ind(B).
定义7[14]对属性a∈A,如果Ind(A)=Ind
i(A-{ai}),则称ai是冗余的,否则,称ai是独立的或者必要的.若∀a∈A,a都是独立的,则称A是独立的.若A是独立的,且B⊆A,则B也是独立的.
1.3 属性的核和约简
定义8[14-15]若B⊆A是独立的,并且Ind(B)=Ind(A),则称B是A的一个约简(reduction).
显然A的约简不是唯一的,A的约简记作red(A).
定义9[14-15]A中所有不可省略关系的集合称为A的核(core),记作core(A).
定义10[14-15]A的核等于A的所有约简的交集,即core(A)=∩red(A).
其中red(A)是A的所有约简的族集.
2 交叉口交通流模型
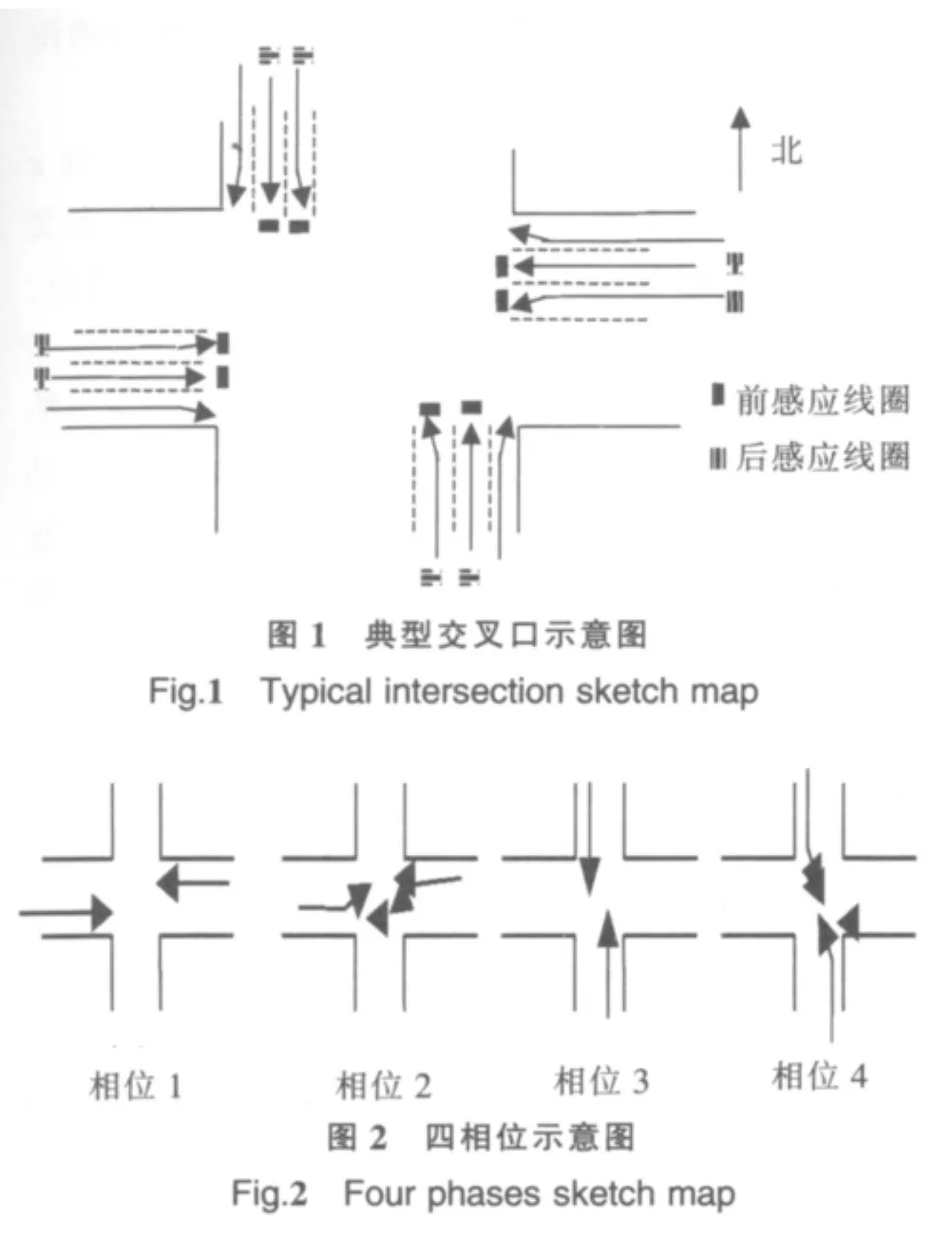
典型的单交叉路口一般分东、西、南、北四个方向,每个方向有直行、左转和右转车道,如图1,每个车道都埋设有二个感应线圈,后感应线圈用来测量(t-△t,t)时间内进入该方向的车辆数量,前感应线圈用来测量驶离的车辆数量,同一车道前后两个线圈相距80~300 m,可检测该车道的车辆密度和阻塞参数.
传统的单交叉路口信号为常用的四相位控制:东西直行、东西左转、南北直行、南北左转(见图2),右行车流没有单独的相位控制,通常跟随直行和左行相位行驶.根据实际交通经验,每一相位时间不能过短,以免某一相位的绿灯时间过小,使车辆不能及时通过路口而影响交通安全,一般最小相位时间为15~20 s,信号周期也不能过长,一般不超过220 s,否则会由于某一相位的绿灯时间太长而使驾驶员心理上难以承受.一般说,当车辆延误很小时,按最小周期运行,当车辆延误很大时,按最大周期进行控制.
3 粗模糊交通控制设计思想

以上面所述的四相位交叉路口为例,本文采用两级粗模糊控制器实现变相序交通控制,即交叉路口相位不按原先设定的顺序运行,而是根据交叉路口处各方向的阻塞情况来决定相位顺序及相位的运用时间.第Ⅰ级为相位切换模糊控制器,根据车辆检测器检测到的车流量等情况,通过信号预处理系统计算每个相位的车道阻塞度,根据车道阻塞度确定当前运行相位.第Ⅱ级粗模糊控制器用于确定当前相位的绿灯延时e,设各相位所对应的车道阻塞度为Gi,i∈1,2,3,4,Gi=max{Gi1,Gi2},Gi1,Gi2表示同相位相应车道的阻塞度,取它们的最大值作为输入量.同时,还考虑了与相邻交叉路口的关系,在相邻交叉路口比较拥挤的情况下,本交叉路口就不应有过多的车辆驶向相邻交叉路口,否则将使相邻交叉路口的车辆过多而出现阻塞.因此,在输入量中加入了相邻交叉路口的车辆阻塞度Gnext,输出量为相位绿灯延时e.
4 变相序粗模糊交通控制器的设计
4.1 粗模糊交通控制器的构成
为获得可靠的交通流信息,在交叉路口的每个入口方向的每个车道上分别设置两个信号检测器构成一个检测区,如图1所示,其中一个设在停车线处,用于计算该车道的车辆离开数,另一个设在距离第一个检测器Dm处,用于计算车辆的到达数.为了能确定接下来的10~15 s的时间内交通流情况,D一般取100~150 m之间.变相序交通控制采用二级模糊控制,其中第Ⅰ级为相位切换模糊控制器,第Ⅱ级为绿灯延时粗模糊控制器,此系统的结构见图3.
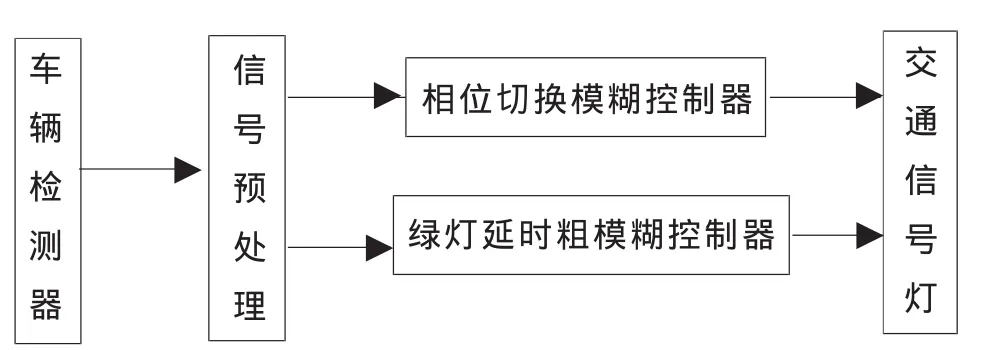
图3 变相序系统结构图Fig.3 Changeable phases systeMchart
4.2 相位切换模糊控制器
变相序粗模糊控制的第一级为相位切换模糊控制器.以前的控制方案是由有一定经验的专家和交警通过对某个路口的交通流数据进行归纳和研究,从而得出固定的相位顺序,在相位固定的基础上再给出最优的当前相位绿灯延时,这显然存在一定的人为因素,当固定的下一相位车流量很少甚至为零时,根据这种控制规则,给出至少是最少绿灯时间,中间还包括绿灯转换所消耗的黄灯时间,如果下两相位或是更后相位有很大的车流量,那么就必然会造成车辆平均延误时间较长.本文采用相位切换模糊控制器,可以在一个周期内优化相位组合,从而使得车辆平均延时进一步减少.如图2考虑四个相位的信号:东西直行或右行,东西左行,南北直行或右行,南北左行.记其分别为A,B,C,D,各相位阻塞度记为 Gi,(i=A,B,C,D),Gi=max{Gi1,Gi2},Gi1,Gi2表示i相位相应车道的阻塞度.一个周期内有优先权的模糊控制规则由下列规则库得到:
设当前相位为A,首先计算各相位的阻塞度.若GB最大,则接下来为B相;
若GB为中,则接下来看相位C和D,若GC为大,则接下来为相位C,若GD为大,则接下来为相位D.否则,取B,C,D中阻塞度最大者为下一相位;
若GB为小,则接下来看相位C和D,若GC或GD为大或中,则接下来为C和D中的阻塞度大者.否则,取B、C、D中阻塞度最大者为下一相位;
若GB为零,则接下来为相位C.
4.3 绿灯延时粗模糊控制器
变相序粗模糊控制是把交通信号控制设计为两级,第Ⅰ级是在交叉路口相位切换前选择出将要运行的相位s,第Ⅱ级以当前相位s的阻塞度Gs,下一相位s+1的阻塞度Gs+1及与s相位和s+1相位对应的相邻路口阻塞度 Gnexts,Gnexts+1作为输入量,输出量为这一相位将要运行的时间(绿灯延时).
设交叉路口的所有车道统一编号,并定义e为绿灯延长时间,Gj为某绿灯时间内,绿灯方向上第j号车道的阻塞度,1≤j≤n,n为该时段绿灯方向的车道数,Gnextk为对应的绿灯时间内,与绿灯对应的相邻路口第k号车道的阻塞度,1≤k≤m,m为该时段与绿灯对应的相邻路口的车道数.令 Gs为某绿灯时段内绿灯方向所有车道的最大阻塞度,Gnexts为相应绿灯时段内与绿灯方向对应的相邻路口所有车道的最大阻塞度.绿灯延时的粗模糊控制的控制算法为:

首先由第Ⅰ级模糊控制器选择出当前要运行的相位s,并给出该相位的最小绿灯时间gmin,在此时间内绿灯无条件的亮,此段时间结束后,检测gmin时段内该车道的最大阻塞度Gs和相邻路口对应车道的最大阻塞度Gnexts及下一相位s+1各车道及相邻路口对应车道的最大阻塞度 Gs+1、Gnexts+1,由粗模糊控制器推理出绿灯延长时间e,e结束后,根据检测的e时段内各阻塞度的大小,计算新的绿灯延长时间,以此循环.如果累积绿灯时间达到最大绿灯时间gmax,则按第Ⅰ级模糊控制器选择的相位强行换相.
其中由粗模糊控制器推理出绿灯延长时间e是模糊控制的关键,一般模糊规则的获得都是由交警的经验总结得出,本文借助S-粗集的有关理论,直接从交叉口的测量数据提取模糊控制规则.
取当前相位s的阻塞度Gs,下一相位s+1的阻塞度Gs+1及与s相位和s+1相位对应的相邻路口阻塞度Gnexts,Gnexts+1作为输入变量,为简单起见,这四个变量均取3个等级,即其模糊语言子集为{小S,中M,长L},并规定其对应的属性值为{1,2,3}.模糊控制器的输出变量为绿灯延时e,定义绿灯延时在其论域上的模糊语言子集为{短延时S,较短延时RS,适中延时M,较长延时RL,长延时L},对应的属性值为{1,2,3,4,5},各语言变量模糊化后分别作为交通控制系统决策表的条件属性和决策属性.
四个输入变量根据经验可以确定3×3×3× 3=81条模糊控制规则,采用粗糙集理论中决策表的约简方法[15]可以得到交叉路口的一个最小化决策表见表1,其中*表示条件属性可取任意值.
这样,规则数由81条简化成了23条,根据最小决策表,可以得到如下的最小决策算法:

上述模糊控制规则说明,如果绿灯方向的车辆少,同时相邻路口通行方向的车辆也较少时,该相位绿灯延时不增加;绿灯方向的车辆多且相邻路口通行方向的车辆多,或绿灯方向的车辆多或者相邻路口通行方向的车辆多,但等待通行的车辆少且相邻路口等待通行的车辆也较少时,可多延长该相位的绿灯时间以提高交叉口的通行能力.

表1 绿灯延时控制器的最小决策表Tab.1 The smallest decision of green delay controllers
5 仿真研究
以图2所示的四相位单交叉路口为例,假定路口各车道检测区的车辆到达率是随机的,以交叉口处车辆的平均延误时间为评价指标,取各相位的绿灯时间为25s,黄灯时间为4s,绿灯期间车流以1离去,采用MATLAB6.5软件[16-17]对文中设计的变相序粗模糊控制编程,根据各相位不同的车辆到达率进行仿真,与传统的四相位固定相序定时控制进行比较,得到车辆的平均延误时间如表2.
仿真结果表明,各相位车辆的平均到达率差异越大,变相序交通控制方法越优于传统的固定相序定时控制.
6 结语
交叉路口的交通控制在城市交通管理中具有非常重要的作用,传统的交叉口的交通控制信号只是简单的时间控制,没有考虑具体的交通情况,往往造成严重的交通堵塞.本文把粗糙集理论融入常规的模糊建模过程,应用粗糙集理论的知识推理处理测量数据,减少了模糊控制器的输入量,降低了控制器设计的复杂度.同时,考虑了相邻交叉路口的车流量,融合了车辆密度和平均速度二者的信息,引入了阻塞参数和拥挤度,比较准确地反映车道的阻塞程度,仿真结果表明,基于粗糙集的变相序交

表2 车辆平均延误时间对照表Tab.2 The coMparison table of average delay time of vehicles
Proceedings,1996:245-252.
[4]田捷,杨鑫.生物特征识别技术理论与应用[M].北京:电子工业出版社,2005.
[5]Zhang WD,Zhang C,Chen T H.Security analysis for key generation systems using face images[C].proc.of IEEE International Conference on ImageProcessing(ICIP)Singapore,2004:3455-3458.
[6]Charles C,Negar K.Dennis J L.Secure Smartcard-Based Fingerprint Authentication[C].2003 ACMWorkshop on Biometrics Methods and Application(WBMA2003),Berkeley,California,2003:45-52.
[7]Juel A,Wattenbergm.A fuzzy comMitment scheme[C]. Proc of the 6th ACMConference on Computer and Communications Security,1999:28-36.
[8]Chang Y J,Zhang WD,Chen T H.Biometric Based Cryptographic Key Generation[C].IEEE International Conference on Multimedia and Expo(ICME)Taiwan,2004:2203-2206.
[9]ShaMir A.HoWto Share a Secret[J].Communications of ACM,1979,22(11):612-613.
[10]陈鲁生,沈世镒.现代密码学[M].北京:科学出版社,2003.
[11]李昊,傅曦.精通Visual C++指纹模式识别系统算法及实现[M].北京:人民邮电出版社,2008.
[12]付波,李建平.人脸特征密钥的容错生成算法[J].计算机应用研究,2008,25(1):260-262.
[13]Costanzo R C.Biometric cryp tography:key generation using feature and parametric aggregation[M].Washington:George Washington University,2004.
责任编辑:毕和平
[1]李新.密文数据库系统的设计 [J].计算机工程与应用,2005,41(32):169-171
[2]陈睿,袁丁.密文数据库加脱密引擎关键技术研究[J].计算机工程与设计,2007,28(14):182-184.
[3]房国志,刘焕武.一种混合密码体制的数据库加密技术研究[J].哈尔滨理工大学学报,2008,13(5):33-35.
[4]冯朝胜,袁丁.数据库加密系统密钥管理模块的设计[J].电子科技大学学报,2007,36(5):830-833.
[5]王元珍,冯超.数据库加密系统的研究与实现[J].计算机工程与应用,2005,45(8):171-172.
[6]冯朝胜,袁丁.密钥管理在数据库加密系统中的应用研究[J].四川大学学报:自然科学版,2007,42(6):1118-1122.
[7]Stallings W.密码编码学与网络安全[M].北京:电子工业出版社,2005.
Design and Simulation of Traffic Controller Based on Rough Sets Theory
GUO Zhilin,GUOYan,SUN YanMin,GUOLi
(Dept.Of Math,Shangqiu Normal College,Shangqiu 476000,China)
By considering the information of car density and average velocity,the congestion parameter is introduced,and a kind of change phase traffic signal controller method based on rough sets theory is proposed,which integrates rough sets theory into routine fuzzy inference by use of the knowledge inference for rough set theory,thus the input value and the designing difficulty of controller is reduced,and the fuzzy controller for city traffic is achieved.
singular rough sets;traffic controller;congestion parameter;change phase;systeMsimulation
O 159
A
1674-4942(2010)02-0125-05
2010-01-12
河南省自然科学基金项目(092102210152);河南省政府政策研究招标课题(B373)
猜你喜欢
作文周刊·小学一年级版(2020年40期)2020-10-19
石油沥青(2019年2期)2019-04-28
娃娃乐园·3-7岁综合智能(2016年4期)2016-10-24
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
汽车文摘(2015年1期)2016-01-13
汽车文摘(2015年11期)2015-12-14
汽车文摘(2015年11期)2015-12-02
电源技术(2015年11期)2015-08-22
