
一种改进的单神经元PID控制器
2010-08-23 04:47任金霞
制造业自动化 2010年12期
阳 帅,任金霞
YANG Shuai, REN Jin-xia
(江西理工大学 机电工程学院,赣州 341000)
0 引言
PID线性控制器结构简单,使用方便,适用的控制对象面广,至今仍在实际工程应用中使用相当广泛。对一些复杂过程,参数时变系统,由于PID的参数不易实时在线调整,在应用中影响系统的控制品质。而单神经元PID控制器的提出对这一问题有了很大改善。但是单神经元PID控制器的神经元比例系数K不好确定,本文提出的改进算法,K值根据误差的变化在线调整,可以实现较好的控制效果。
1 单神经元PID控制器
1.1 几种常用的学习规则
1.1.1 联想式学习—Hebb规则
如果两个神经元同时被激活,则它们之间的连接强度的增强与他们激励的乘积成正比,以Oi表示神经元i的激活值,Oj表示神经元j的激活值,wij表示神经元i和神经元j的连接权值,则Hebb学习规则可表示为

式中,η为学习速率。
1.1.2 误差传播式学习—Delta学习规则
在Hebb学习规则中,引入教师信号,即将Oj换成希望输出的di与实际输出Oj之差,就构成了Delta学习规则

1.1.3 有监督的Hebb学习规则
将Hebb学习规则和Delta学习两者结合起来就构成了有监督的Hebb学习规则

1.2 单神经元PID控制器结构及控制算法
单神经元PID控制器结构如图1所示。

图1 单神经元PID控制器结构
单神经元自适应控制器是通过对加权系数的调整来实现自适应、自组织功能,权系数调整是按有监督的Hebb学习规则实现的。控制算法及学习算法为


ηI、ηP、ηD分别为积分、比例、微分的学习速率;z(k)为性能指标;K为神经元比例系数,K>0 ;w1(k)为x1(k)的加权系数。
由以上算法可知,这个单神经元控制部分本质上仍然是PID算法,三个输入权值分别就是PID控制器的积分、比例、微分系数,但是神经元网络权值 (i=1,2,3)均能在线调整,具有较强的自学习和自适应能力,能适应环境变化或模型不确定性,增强系统的鲁棒性。但是K值的选择还是只能靠专家经验。
K值的大小非常重要。K越大,则快速性越好,但超调量大,甚至可能使系统不稳定。当被控对象时延增大时,K值必须减小,以保证系统稳定。K值选择过小,会使系统的快速性变差。
2 改进的单神经元PID控制器
这里提出一种改进的单神经元PID控制器,K值根据误差的大小在线调整。

式(7)中α值用来保证K>0;β是误差的加权系数,保证K值不会过大也不会过小。当误差较大时,K值也相应的增大,增加系统的响应速度;当误差减到比较小时,K值也同时减小,降低系统的超调量。
改进的单神经元PID控制器结构如图2所示。
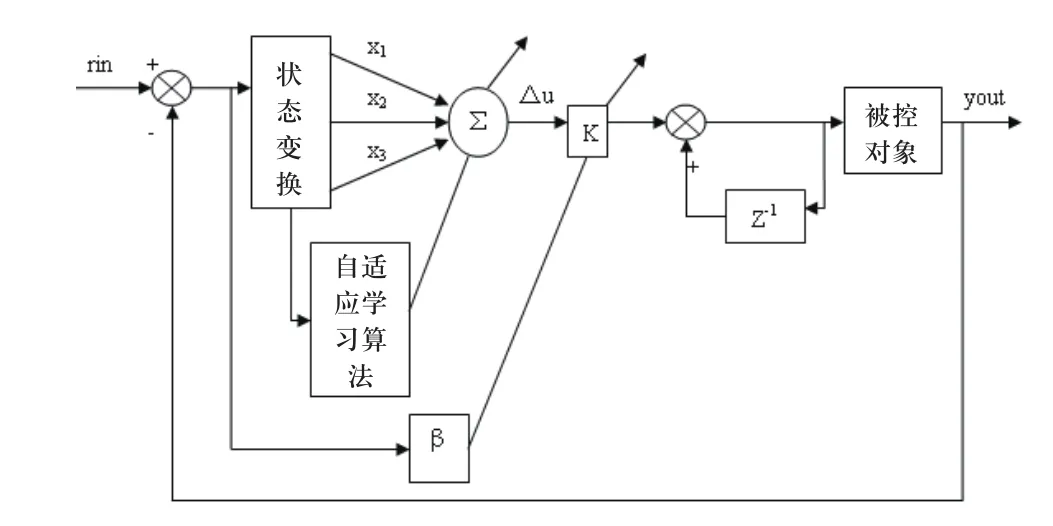
图2 改进的单神经元PID控制器结构
3 仿真
被控对象为

输入指令为一阶跃信号:rin(k)=1.0 ,ξ(k)为在100个采样时间的外加干扰,ξ(100)=0.10,采样时间为1ms。分别对传统的单神经元PID控制器和改进的单神经元PID控制器进行仿真。对传统的单神经元PID控制器K值选0.02,对改进的单神经元PID控制器取α=0.01,β=0.22 。传统的单神经元PID控制器的仿真结果如图3所示,改进的单神经元PID控制器的仿真图如图4所示。
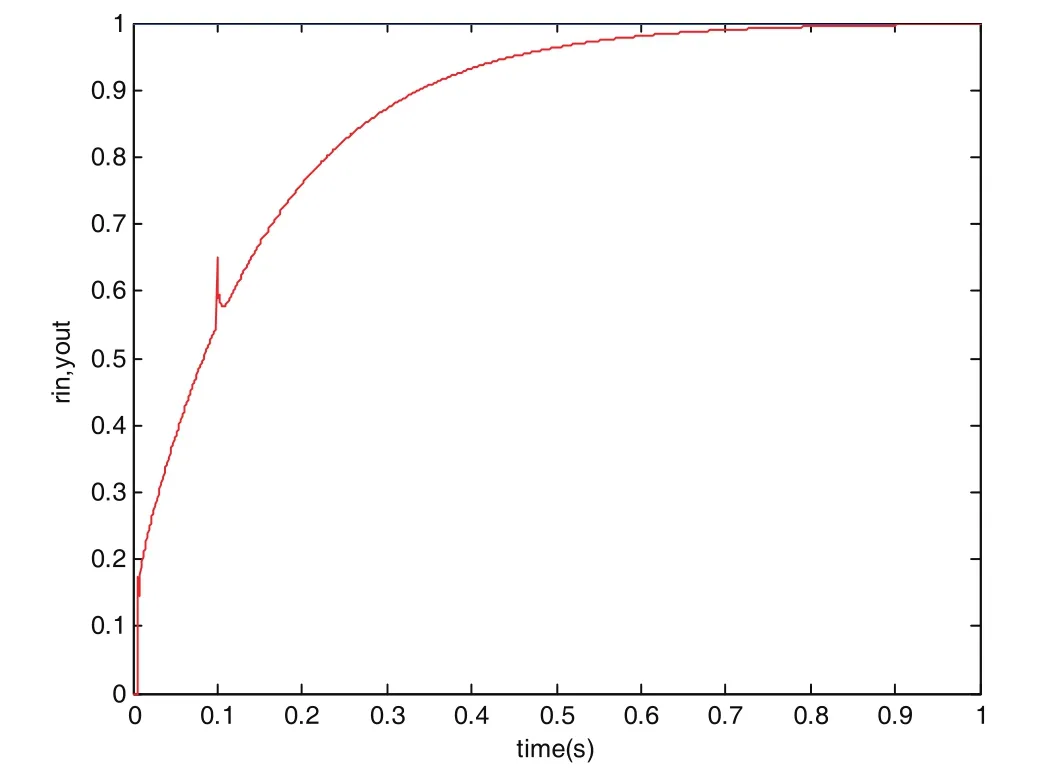
图3 传统的单神经元PID控制器的仿真结果

图4 改进的单神经元PID控制器的仿真结果
对比两个仿真结果,传统的单神经元PID控制器的仿真图过渡时间较长,0.8s左右才达到稳定,而改进的单神经元PID控制器过渡时间仅需不到0.1s,可以看出改进的单神经元PID控制器较好的控制效果。
4 结论
本文提出了一种改进的单神经元PID控制器,根据误差的变化在线调整神经元比例系数。通过仿真分析,该控制器比传统的单神经元PID控制器的快速性明显变快。
[1]刘金琨.先进PID控制MATLAB仿真[M].北京:电子工业出版社,2004.
[2]刘金琨.智能控制(第2版)[M].北京:电子工业出版社,2009.
[3]李国勇.神经模糊控制理论及应用[M].北京:电子工业出版社,2009.
[4]张世韬,杨风,郝骞.单神经元PID控制器研究及仿真[J].机械工程与自动化,2009,3:69-70.
[5]高永琪,安士杰,孔德永.基于单神经元自适应PID控制的共轨压力控制研究[J].武汉理工大学学报(交通科学与工程版),2007,31(5):804-806+834.
[6]FANG You-tong,FAN Cheng-zhi.Single neuron network PI control of high reliability linear induct motor for Maglev[J].Journal of Zhejiang University SCIENCE A,2007,8(3):408-411.
[7]ZHANG Dong-yan,LIU Ya-qiu,CAO Jun.Application of single neuron adaptive PID controller during the process of timber drying[J].Journal of Forestry Research,2003,14(3):244-248.
猜你喜欢
成都信息工程大学学报(2022年3期)2022-07-21
沈阳师范大学学报(教育科学版)(2021年2期)2021-02-01
中国惯性技术学报(2020年2期)2020-07-24
江苏通信(2018年4期)2018-12-04
现代装饰(2018年5期)2018-05-26
自动化学报(2017年7期)2017-04-18
舰船科学技术(2016年1期)2016-02-27
船海工程(2015年4期)2016-01-05
中国生化药物杂志(2015年4期)2015-07-07
弹箭与制导学报(2015年1期)2015-03-11
