
基于HLA的编队导弹航路规划仿真系统设计
2010-08-05 08:53老松杨谭东风
电光与控制 2010年8期
刘 钢, 老松杨, 谭东风
(国防科学技术大学C4ISR技术重点实验室,长沙 410073)
0 引言
随着远程精确制导武器和信息侦察装备的高速发展,现代海上机动战的作战理论正在逐渐由传统海上机动战向现代海上火力机动战转变。海上火力机动战理论牵引海军武器装备技术迅猛发展,作为提高反舰导弹作战能力的重要措施,航路规划技术目前正逐渐被反舰导弹所应用,使得反舰导弹具有越来越强的作战能力。如何运用航路规划技术以充分发挥反舰导弹武器的作战效能,已成为目前亟待解决的难题。而水面舰艇以编队作战为主要作战模式,对航路规划技术运用的研究就必须要以水面舰艇编队为背景来开展。
航路规划技术的应用推动了海上火力机动战理论的发展,同时也给导弹使用人员带来了许多难题,航路交叉就是其中一个重要的问题。为了解决这个难题,文献[1]提出了单舰导弹航路规划功能区域的概念和编队导弹航路规划区域划分的思想。这种新元素的加入将给传统基于直航式反舰导弹的作战流程带来巨大影响,使传统的舰舰导弹攻击的兵力行动、战法运用等发生一系列的改变,从而使整个编队导弹攻击理论体系发生变化。文献[1]基于这个新概念,进一步提出了编队导弹航路规划的决策过程,确定了火力分配、区域划分、航路规划3种决策的先后顺序。但三者不仅决策模型复杂,而且相互影响,在实际作战中难以操作。
分布交互仿真(Distributed Interactive Simulation,DIS)通过网络将分散在各地的仿真器、计算机生成兵力以及其他设备联接为一个整体,形成一个可以在时间和空间上互相耦合的虚拟战场环境。目前,基于高层体系结构(High Level Architecture,HLA)的分布仿真是仿真发展的主要方向[2]。HLA最重要的两个特点就是支持基于组件(对象)的仿真应用开发模式和将仿真功能与通用的支撑系统相分离的体系结构[3]。相对于DIS标准,HLA具有灵活性、可扩充性、网络冗余数据少等优点。本文基于HLA为编队导弹航路规划搭建一个仿真试验平台,用以研究火力分配、区域划分、航路规划3种决策的交互关系,进而制定相应的作战规则,来指导决策。
1 编队导弹航路规划过程及问题领域分析
水面舰艇编队导弹航路规划,是指在以装备有航路规划导弹的水面舰艇为核心的水面舰艇编队进行对海导弹攻击中,在各种典型的队形配置条件下,充分发挥航路规划导弹的技术特点,根据当时的作战任务需要,进行适当的兵力机动,充分考虑敌方目标的有关因素(如周围防御力量的水平)及海区自然环境,合理选择攻击目标、制定火力分配方案以及确定攻击航路,在技术及战术许可的前提下,使各枚反舰导弹以适当的航路飞行,达到最大限度发挥导弹攻击效力的目的,从而提高舰艇编队整体的对海作战能力。
文献[1]中提出了单舰导弹航路规划功能区域的概念和编队导弹航路规划区域划分的思想,建立了模型并且进行了工程实践,检验了模型的准确性和方法的正确性。在此基础上,结合编队导弹航路规划的特点,参考传统编队导弹攻击的过程,得出编队导弹航路规划过程。从时间发展的角度看,编队导弹航路规划分为6个主要阶段,包括:作战筹划、兵力部署、信息保障、火力分配、区域划分、航路规划,其中信息保障贯穿于整个过程当中。区域划分是指在确定导弹攻击火力分配方案以后,在海图上划定编队内各单舰航路规划椭圆区域,并且根据椭圆区域的重叠情况计算出编队导弹攻击航路规划区域划分参考线(在紧急或特殊情况下可人工划定),为各舰确定实际可用的导弹航路规划区域[1]。编队导弹航路规划过程如图1所示。
图1反映了编队导弹航路规划过程中各个阶段的先后顺序,其中,编队兵力协同机动的反馈过程体现了兵力机动应服务及服从于整体航路规划的思想。图中可见,编队导弹航路规划过程中火力分配、区域划分、航路规划三者是动态交互的,交互的途径就是通过编队兵力协同机动。
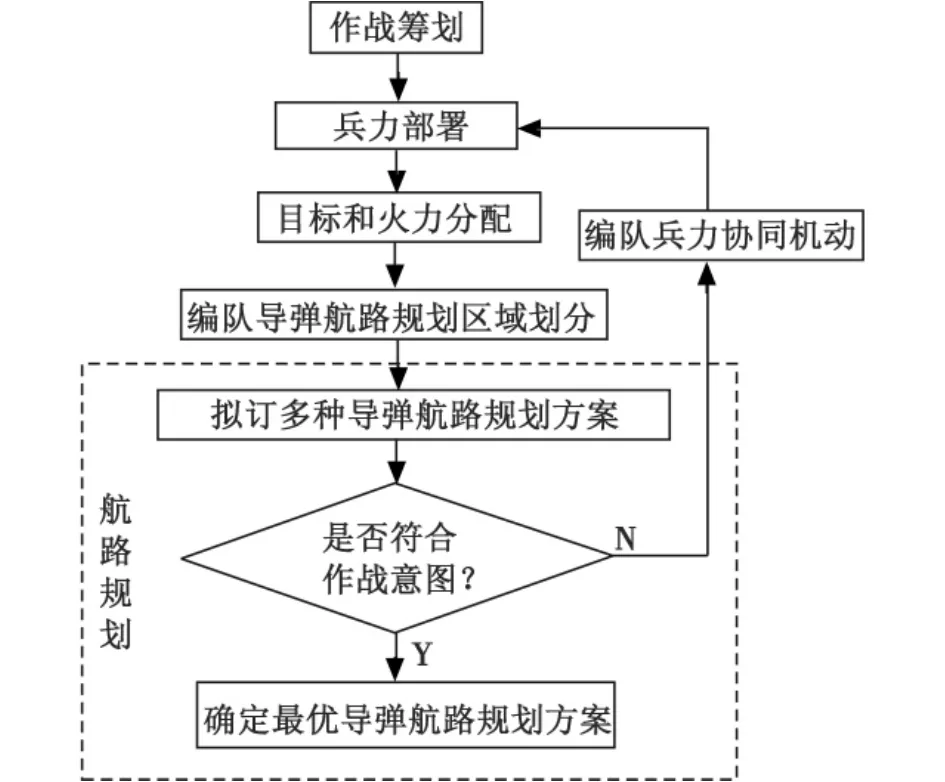
图1 编队导弹航路规划过程示意图Fig.1 The process of surface ship formation missile path plan
编队进行对海导弹攻击航路规划时,一般来说,火力分配、区域划分、航路规划3个阶段在执行程序上具有先后顺序关系。但是,由于航路规划的复杂性,为了取得最大的攻击效果,前者的决策必须考虑到后者的可操作性。因此,区域划分制约着火力分配,航路规划又制约着区域划分,三者形成了互相制约、相互耦合的关系。为了提高编队导弹航路规划的整体操作性,在建立三者的解析模型时,必须全面考虑三者的相互影响以及其他影响因素对它们产生的作用,显然这是非常困难的。在3个模型串行组合的情况下,前者的计算结果不一定满足后者的计算条件,并且有些定性因素除非进行一定假设,否则根本无法在模型中体现。这就使得编队导弹航路规划成为了一个非结构化的问题[4]。因此,要想得到满足一定条件的编队导弹航路规划方案,仅仅依靠解析模型是远远不够的,只有通过仿真,在不同的情况下,多次模拟编队导弹航路规划的过程,从而发现其中的规律,得出一套约束各个模型的规则,来指导决策。
根据编队导弹航路规划的功能需求可以确定4个活动者:编队指挥所、情电指挥员、舰艇指挥所和导弹武器系统。其用例主要有:作战筹划、兵力部署、火力分配、区域划分、航路规划和方案评估等。其中,按照实施层次的不同,单枚导弹的航路规划又分为航路设计和航路计算。在这里,航路设计是指舰艇指挥员根据战场态势为导弹航路明确实时的约束条件;而航路计算是指导弹武器系统根据实时约束条件和导弹自身的飞行约束条件解算出飞行航路。作者在文献[1]中利用遗传算法为航路计算提供了一种智能技术的决策支持。图2所示为编队导弹航路规划的顶层用例图。
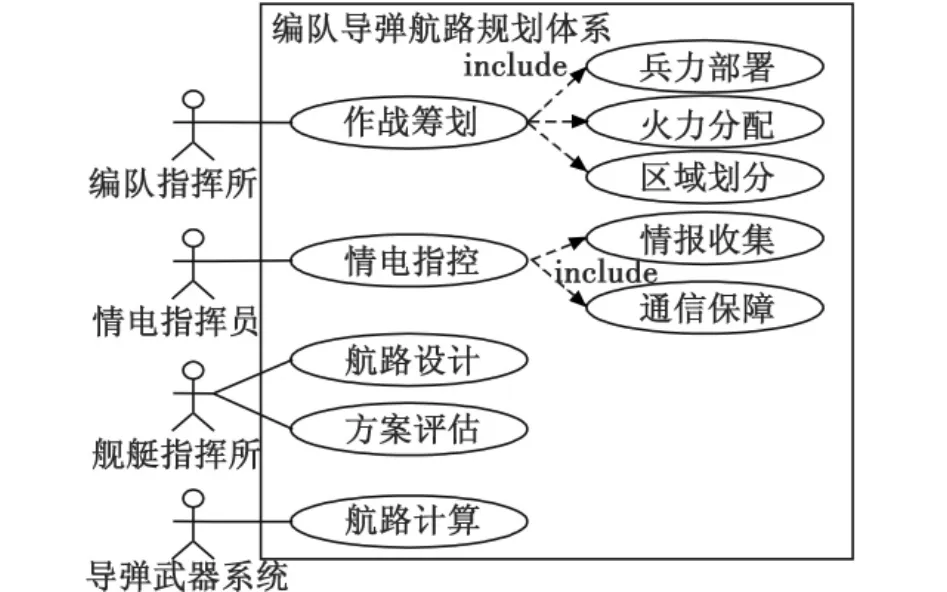
图2 编队导弹航路规划的顶层用例图Fig.2 The top-level use-case diagram of surface ship formation missile path plan
2 编队导弹航路规划仿真系统的结构组成
编队导弹航路规划是一个分布式的系统,编队、舰艇和导弹武器各个单元之间功能不同,决策模型也不同。编队导弹航路规划又是一个交互的过程,在编队指挥所、舰艇指挥所、导弹武器系统之间存在多种信息的交互,包括状态信息、位置信息和控制信息。尤其在火力分配、区域划分和航路规划三者之间存在着更为复杂的动态交互关系。为了逼真地展现这些关系,仿真系统必须满足分布式和交互的要求。
本文所设计的编队导弹航路规划仿真系统采用HLA/RTI规范为核心的技术框架,以仿真资源为核心,从系统仿真的角度对编队导弹航路规划的过程以及火力分配、区域划分和航路规划三者之间的交互进行仿真。HLA的一个基本思想是将特定仿真中的功能与通用的支撑服务相分离,联邦成员通过调用RTI提供的服务进行交互,交互信息基于HLA的公布/订购机制[5]。根据对编队导弹航路规划过程的分析,参考联邦开发和执行过程模型FEDEP(Federation Development Execution Process),确定编队导弹航路规划仿真系统的总体逻辑结构和联邦组成如图3所示。

图3 编队导弹航路规划仿真系统总体逻辑结构Fig.3 The general logic structure of surface ship formation missile path plan simulation system
3 编队导弹航路规划仿真系统的面向对象分析
HLA按照面向对象的思想和方法来构建仿真系统,它是在面向对象分析与设计的基础上划分仿真成员,构建仿真联邦的技术[2]。面向对象分析的目的是产生一个符合用户需求并能够反映问题域和系统责任的概念模型及其详细说明。
统一建模语言(Unified Modeling Language,UML)作为面向对象分析与设计中的一种标准建模工具,融合了当前一些面向对象的主要概念和技术,提供了丰富的基于面向对象概念的模型元素及其图形表示元素,能够直接将问题域结构反映到系统模型中,适应需求的变化[6]。UML描述了一个系统的静态结构和动态行为,将系统描述为一些离散的相互作用的对象并最终为外部用户提供一定功能的模型结构。静态结构定义系统中的重要对象的属性和操作以及这些对象之间的相互关系,动态行为定义对象的时间特性和对象为完成目标而相互进行通信的机制[7]。
3.1 编队导弹航路规划仿真系统的静态结构模型
识别出一组概念或对象是面向对象系统分析的核心。建立静态结构模型就是根据功能需求和问题领域分析,找出编队导弹航路规划仿真系统中概念性的类及它们之间的相互关系,并确定类的属性和主要操作,以此为基础建立类图(Class Diagram)。类图提供系统组件及其相互关系的静态行为。图4以UML类图的形式给出了编队导弹航路规划仿真系统中的主要类及各个类之间的关系。
如图4所示,编队指挥所、单舰指挥所都是能够进行指挥控制的实体,因此抽象出指挥控制中心作为这两个类的超类,让它们从指挥控制中心派生。图中长方形框表示类,分上、中、下3个区域,上部放类名,中部和下部分别为类的属性和操作。框之间的连线表示类与类之间的关系,实心菱形表示从属关系,空心箭头表示泛化(继承)关系。
3.2 编队导弹航路规划仿真系统的动态行为模型
仅仅了解系统的静态逻辑结构及其内部各种类及对象之间的静态关系是不全面的,为了表现系统中对象的交互过程,需建立系统的动态行为模型,以便分析系统的行为,印证和修改系统的静态结构。在对编队导弹航路规划体系进行动态建模时,可根据用例图和类图建立时序图,从每一个用例的角色出发,找到与其交互的对象及其之间的消息传递。图5给出了描述编队导弹航路规划仿真系统的时序图。

图4 编队导弹航路规划仿真系统的类图Fig.4 The class diagram of surface ship formation missile path plan simulation system

图5 编队导弹航路规划仿真系统的时序图Fig.5 The sequence chart of surface ship formation missile path plan simulation system
这里需要说明,若单舰级导弹航路规划方案评估结果为能够满足要求时,则向编队指挥所输出航路参数;否则,重新进行航路设计(图5中虚线箭头所示)。对于编队层次而言,各舰上报航路规划方案后,经过方案评估,若作战效果能够满足作战要求时,则输出航路参数,仿真结束;否则,返回到配置初始态势,重新修改补充参数。编队级和单舰级的两级方案评估是个迭代增量式的过程,驱动火力分配、区域划分和航路规划3个模型之间的动态交互。
4 编队导弹航路规划仿真系统的设计
4.1 仿真联邦的SOM描述
仿真对象模型(Simulation Object Model,SOM)是单一联邦成员的对象模型,它描述各个仿真在参与联邦运行时能提供给联邦的数据交换的本质能力。从图3可知,编队导弹航路规划仿真联邦包括9个联邦成员,各成员功能如下。
仿真系统总控成员主要实现仿真方案管理和系统管理。负责仿真联邦方案数据的初始化及仿真初始设置,负责构建编队舰艇和目标的初始位置状态、设置障碍物的位置。完成联邦运行控制,在初始化阶段向各联邦成员发送初始化命令及成员初始化信息;当接收到所有成员初始化成功信息后,向各成员发送仿真开始控制命令;在仿真结束时,向各成员发送仿真结束控制命令。
编队指挥所成员负责完成火力分配、区域划分,确定导弹的攻击进入方向,针对当前编队级的方案进行实时评估。
舰艇指挥所成员负责仿真本舰艇机动,公布本舰艇实时位置和状态参数,确定导弹自导作用距离,进行本舰航路设计,针对当前单舰级的方案进行实时评估。
导弹武器系统成员负责完成航路计算,公布反舰导弹的自身航路约束参数。
目标舰艇成员负责仿真目标舰艇机动,公布目标舰艇的实时位置和状态参数。
仿真模型库成员是系统中各类实体行动多粒度仿真模型集成,实现编队导弹航路规划过程仿真及方案评估。
数据统计分析成员负责记录仿真运行过程中所有交互的数据及信息,进行数据处理,显示并评估仿真效果,最终目的是发现作战决策规则。
战场作战环境成员主要完成气象环境、电磁环境、海情环境以及障碍物和威胁区的设置,为编队导弹航路规划提供可设定的复杂仿真实验环境。
态势显示成员基于电子海图实现仿真系统运行过程中的各个子方案以及最终方案的动态显示,包括显示编队舰艇、目标舰艇、障碍物和威胁区的空间几何关系,火力分配方案、单舰导弹航路规划椭圆功能区域及其重叠情况,区域划分方案,以及各枚导弹的最终航路等。
4.2 仿真联邦的FOM/SOM设计
FOM(Federation Object Model,FOM)的主要目的是提供联邦成员之间以公共的、标准化的格式进行数据交换的规范,它描述了在仿真运行过程中将参与联邦信息交换的所有对象类、对象属性、交互类、交互参数的特性[5]。
在上述分析的基础上,可以确定联邦中的对象类主要包括:AC(系统总控)、FC(编队指挥所)、SC(舰艇指挥所)、MWS(导弹武器系统)、TS(目标舰艇)、STSM(反舰导弹)、MCS(导弹火控系统)、CE(战场作战环境)。交互类主要包括:SetScenario(初始态势设置)、SetTarget(目标态势设置)、SetBarrier(障碍物、威胁区分布设置)、DistributeFire(火力分配)、DivideArea(区域划分)、SelectBearing(攻击进入方向选择)、SetSelfguide(自导作用距离设置)、DesignPath(航路设计)、CalculatePath(航路计算)、PlanPath(单舰航路规划)、EvaluateScheme_Formation(编队级方案评估)、EvaluateScheme_Ship(单舰级方案评估)。表1是从编队导弹航路规划仿真系统的FOM设计文档中截取的部分对象类/交互类结构表。

表1 编队导弹航路规划仿真系统的FOM/SOMTable 1 The FOM/SOM of surface ship formation missile path plan simulation system
在仿真开始执行前,总控联邦成员通过交互 SetScenario来构建编队各舰艇的初始态势,交互SetScenario的订购者是编队指挥所联邦成员和舰艇指挥所联邦成员;总控联邦成员通过交互SetTarget来构建目标编队的初始态势,交互SetTarget的订购者是编队指挥所联邦成员和目标舰艇联邦成员;总控联邦成员通过交互SetBarrier来构建障碍物和威胁区的位置分布,交互SetBarrier的订购者是编队指挥所联邦成员、舰艇指挥所联邦成员和导弹武器系统联邦成员。在仿真过程中,编队指挥所联邦成员根据交互SetScenario,SetTarget和SetBarrier推算导弹发射点和目标提前点位置,进行火力分配和区域划分,并以交互DistributeFire、DivideArea的形式公布结果,以交互Select-Bearing的形式公布导弹攻击进入方向;舰艇指挥所联邦成员订购交互 DistributeFire、DivideArea和 Select-Bearing,在此基础上公布交互 SetSelfguide和 Design-Path;导弹武器系统联邦成员订购交互SelectBearing,SetSelfguide和DesignPath,并以此进行航路计算,以交互CalculatePath的形式公布结果。舰艇指挥所联邦成员订购本舰导弹武器系统联邦成员所公布的交互CalculatePath,据此进行本舰方案评估,以交互Evaluate-Scheme_Ship的形式公布评估结果,以交互PlanPath的形式公布本舰航路规划结果;编队指挥所联邦成员订购所有舰艇指挥所联邦成员所公布的交互PlanPath,据此进行编队级方案评估,以交互EvaluateScheme_Formation的形式公布评估结果。SOM的公布(P)和订购(S)关系如表2所示。
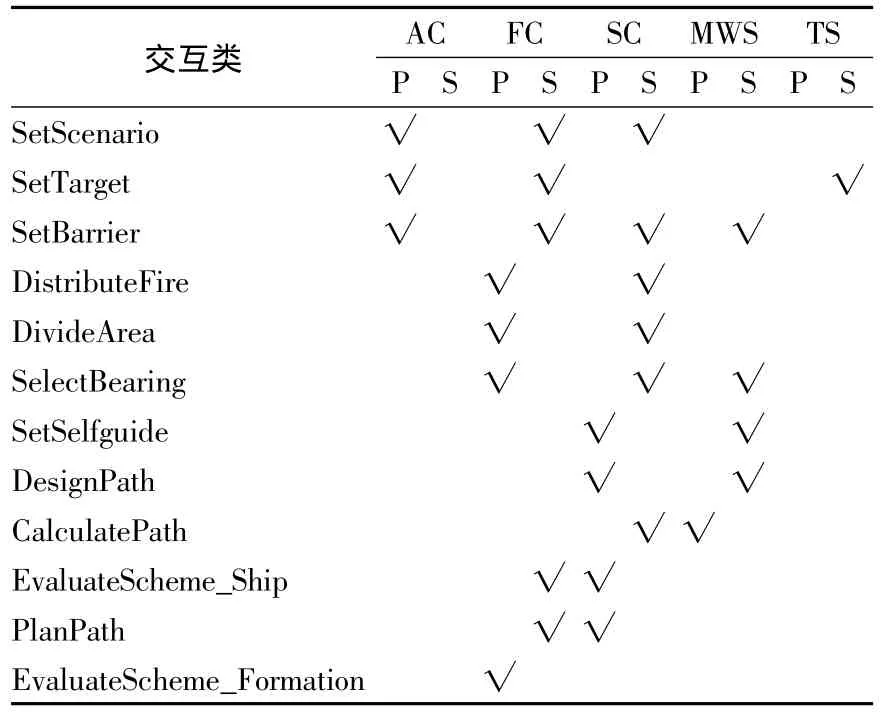
表2 SOM公布和订购关系表Table 2 The relationship of publish and subscription of SOM
5 联邦成员实现和时间管理
联邦成员模型的内容主要包括3个部分:联邦成员实体模型、交互模型和运行逻辑。实体模型直接描述实体自身的行为特征,或者是一组动力学和运动学方程,或者是一组事件流,可以运用传统的连续系统和离散事件系统仿真方法建立实体模型。主执行逻辑是实体模型的执行体,交互模型描述系统中各实体间的交互作用,它基于 HLA/OMT的 FOM,SOM表,按照HLA/RTI的接口规范进行说明。这3部分有机地结合在一起,组成一个联邦成员,完成特定的仿真任务[8]。
以导弹武器系统联邦成员为例,它通过调用提供的RTI的标准服务RTI-Ambassador,完成加入联邦、设置时间管理方式、发布和预定对象类和交互类、进行时间推进等工作,它的主要实体特征通过航路计算模型程序来描述实现。它通过调用RTI-Ambassador来更新反舰导弹对象类的数据,在特定的时刻发送如CalculatePath交互类信息。同时,RTI又通过回调Federate-Ambassador的接口将导弹武器系统联邦成员订购的其他属性传递给导弹武器系统联邦成员。其中发布和订购的对象类和交互类属性如表1所示。自身的行为特征和与其他成员间的信息交互按照一定的逻辑运行,构成了该联邦成员的仿真模型。
联邦运行过程中主要包括如下事件:火力分配、区域划分、航路设计、航路计算和方案评估,具有很强的离散事件仿真特征,而离散事件仿真的核心问题就是时间管理,时间是分布仿真中的核心概念。在编队导弹航路规划仿真系统中,总控成员、编队指挥所成员、舰艇指挥所成员、导弹武器系统成员、目标舰艇成员、仿真模型库成员和战场环境成员之间在时间推进上是互相影响的,因此,它们采用既“时间控制”又“时间受限”的时间管理策略。例如:舰艇指挥所成员在收到“导弹攻击进入方向”消息后才能进行“确定导弹自导作用距离”的仿真动作,并且只有当其发送“航路设计”消息给导弹武器系统成员后,后者才能进行自身的仿真动作。对于态势显示成员和数据统计分析成员,它们的时间推进受其他成员的影响而不影响其他成员的时间推进,因此设为仅“时间受限”。
联邦中成员的逻辑时间推进是在RTI的协调下完成的,采用协商的基于步长的时间推进方式。系统中各个联邦成员的逻辑时间是以时间步长为单位向前推进的,在推进过程中联邦成员将收到并处理所有时间戳值在下一时间点(当前时间+时间步长)前的TSO事件以及所有的RO事件,且联邦成员在时间推进完成前不能发送新的时间。联邦成员通过timeAdvanceRequest()服务请求进行时间推进,在调用该服务时联邦成员必须指明其希望推进到的逻辑时间值(当前时间+时间步长)。该服务将释放联邦成员事件队列中的所有RO事件以及所有时戳值在联邦成员当前逻辑时间和请求时间之间的TSO事件。当RTI将所有时戳值小于或等于指定请求时间的TSO事件全部传递给联邦成员之后,将用回调函数timeAdvanceGrant()通知联邦成员其时间推进请求已经许可,RTI已经完成了当前的逻辑时间推进服务,联邦成员可以开始其下一个时间推进过程。对于消息传递机制,考虑到系统运行时需要传递的消息多,并且少量消息的丢失不会对仿真结果产生太大的影响,为了减小传输时延,采用“快速”方式。另外,“时戳”顺序保证所有消息按照时戳顺序传递到成员[2],为了保证消息有序传递,采用“时戳”顺序。
6 结束语
本文针对航路规划技术在舰艇编队导弹攻击中的应用,给出了编队导弹航路规划的过程和描述其问题领域的用例图,并据此提出了基于HLA的编队导弹航路规划仿真系统设计方案。运用UML的类图和时序图对编队导弹航路规划仿真系统的设计需求进行了可视化的描述。在此基础上,定义和设计了仿真系统中的联邦/仿真对象模型,并分析了联邦成员间的交互关系。最后阐述了联邦成员的实现过程和时间管理机制。编队导弹航路规划仿真系统是一个由各联邦成员和RTI共同构成的开放的分布式仿真系统,整个系统具有可扩展性,它的实现为编队导弹航路规划的战术应用研究、论证提供了技术途径和试验平台,从而为编队导弹航路规划决策支持系统的设计开发以及火力分配、区域划分和航路规划的交互决策提供依据。
[1]刘钢,周智超,徐清华.基于舰艇编队的反舰导弹航路规划[J].电光与控制,2009,16(2):11-17.
[2]周彦,戴剑伟.HLA仿真程序设计[M].北京:电子工业出版社,2002.
[3]陈建华.舰艇作战模拟理论与实践[M].北京:国防工业出版社,2002.
[4]刘钢,周智超,陈文伟.水面舰艇编队导弹航路规划决策支持系统设计[C]//火力与指挥控制研究会2008年学术年会,2008:136-139.
[5]杨军,余永利,张彦忠,等.基于HLA/RTI的维修保障仿真系统及势态显示实现[J].系统仿真学报,2007,19(21):4908-4911.
[6]武志强,杨瑞光,田川.基于UML的防空C3I系统建模[J].电脑开发与应用,2005,18(5):9-11.
[7]牟传兴.基于UML和统一过程的建模技术的研究与应用[D].北京:北京工业大学,2003.
[8]李文哲,张宇文,李铁,等.基于高层体系结构的舰潜对抗仿真系统设计[J].系统仿真学报,2008,20(14):3689-3691.
猜你喜欢
环球时报(2022-12-30)2022-12-30
凤凰动漫(军事大王)(2022年3期)2022-06-17
小哥白尼(军事科学)(2021年5期)2021-08-30
环球时报(2019-01-10)2019-01-10
红土地(2017年1期)2017-06-05
哈尔滨商业大学学报(自然科学版)(2016年4期)2016-09-02
海军航空大学学报(2015年3期)2015-11-11
中学历史教学(2015年11期)2015-11-11
中国民航大学学报(2015年3期)2015-03-01
军事体育学报(2014年3期)2014-02-27
