工业机器人用薄壁四点接触球轴承的设计分析
2010-07-26 09:15曾献智王献锋孙立明蔡素然
轴承 2010年6期
曾献智,王献锋,孙立明,陈 原,蔡素然
(1.洛阳轴研科技股份有限公司,河南 洛阳 471039;2.空军驻洛阳地区军事代表室,河南 洛阳 471000)
滚动轴承作为工业机器人的关键配套元件,对机器人的性能具有重要的影响。现代机器人向更轻型化的方向发展,这就要求与其配套的轴承具有更加轻型的结构[1]。通常情况下,工业机器人轴承的安装空间非常有限,轴承要在有限的安装空间里满足机器人主机对轴承承载能力、刚度、精度和摩擦力矩的性能要求。在这种情况下,选用标准的通用轴承很难满足这种要求,而薄壁轴承很好地解决了这一问题。在工业机器人中采用薄壁轴承不仅可以减轻机器人主机的质量和体积,而且还使得轴承的安装轴采用大直径空心轴代替实心轴成为可能。这样,机器人主机的一些管线、机械联动件等装置可以通过空心轴的空间来传输,这不仅进一步减轻了主机的质量,还能为这些装置提供良好的保护[2-4]。因此,工业机器人轴承特殊的薄壁结构和使用性能要求,决定了其设计上与通用轴承有所差异。下面对工业机器人常用的薄壁四点接触球轴承的设计进行分析。
1 轴承特点分析
薄壁四点接触球轴承广泛应用在工业机器人的肘部和腕部等关节部位[5],其属于薄壁定截面轴承,即对一定系列的轴承,不管轴承内径尺寸大小,它的横截面是一定的;而普通轴承则是径向截面随着轴承内径增大而增大[3]。同时,薄壁定截面轴承每个系列的横截面尺寸被设计为固定值,分别为:4.762 5 mm×4.762 5 mm,6.35 mm×6.35 mm,7.937 5 mm×7.937 5 mm,9.525 mm×9.525 mm,12.7 mm×12.7 mm,19.05 mm×19.05 mm和25.4 mm×25.4 mm[4]。工业机器人常用的等截面薄壁轴承内径范围为101.6~304.8 mm,根据需要可以做到1 321.0 mm。
工业机器人用薄壁四点接触球轴承通常有密封和非密封两种结构形式,如图1所示。其内、外圈为整体式薄壁结构,钢球直径小、数量多,能承受径向载荷、双向轴向载荷和倾覆力矩,相当于两套背对背安装的角接触球轴承,而宽度只相当于一套角接触球轴承的宽度。
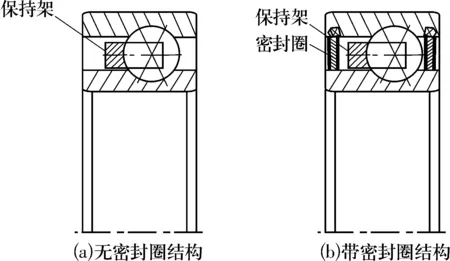
图1 薄壁四点接触球轴承
2 主参数分析
通用轴承主参数的确定是以额定动载荷为目标函数,在一定的约束条件下,通过优化得到。对于工业机器人用薄壁四点接触球轴承,不仅要有较大的额定动载荷以保证有足够的承载能力,还要有足够的刚度以保证机器人主机的定位精度和较小的摩擦力矩以保证灵活运转。因此,仅以额定动载荷为目标函数来确定该轴承的主参数是不合理的。这就要求以额定动载荷、刚度和摩擦力矩3个指标作为目标函数进行多目标优化设计,找到球径和球数的最佳匹配。
3 关键结构参数分析
对于工业机器人用薄壁四点接触球轴承,套圈沟道曲率半径系数、沟道位置、挡边高度是重要的结构参数,在设计中需要重点考虑。
通用轴承内、外沟道曲率半径系数的设计,从等应力角度考虑,一般取fi=0.515,fe=0.525。而对于此类轴承,一般考虑轴承的低摩擦力矩和旋转灵活性,设计上取fi=fe=0.55。
薄壁轴承的横截面面积只有相同内径标准轴承的20%,径向尺寸很小,为增加保持架的强度,必须加大保持架的宽度。由于受密封圈位置的限制,为增大保持架的宽度,该轴承采用非对称沟位置的设计。
挡边高度的确定是以保证轴承在承受轴向载荷情况下,钢球与滚道之间的接触椭圆不被截断为依据。在实际设计中,套圈挡边高度系数的选取应综合考虑工业机器人轴承钢球数量多而直径小的特点和轴承实际工作中的载荷、游隙等情况,采用Hertz接触理论进行分析计算。一般深沟球轴承取Kd=0.35;而工业机器人薄壁四点接触球轴承取Kd=0.32。
4 变形与刚度
在内径尺寸相同条件下,薄壁四点接触球轴承比普通滚动轴承容纳的钢球数量多,因此改善了轴承内部应力的分布,减小了钢球与沟道接触处的弹性变形,提高了轴承的刚度[2-3,6]。薄壁轴承通常对轴承座的刚度比较敏感,高的支承刚度可以补偿薄壁套圈的柔性[2-3],而低的支承刚度会导致轴承套圈产生较大的变形,影响轴承内部应力的分布,进而影响轴承的寿命。因此,该轴承的设计需对轴、轴承和轴承座这一轴系的刚度进行分析,以保证轴承的使用性能。
5 有限元分析的应用
经典的轴承设计分析理论以刚性套圈假设为前提,采用Hertz接触理论对通用轴承的应力、应变和载荷分布进行分析计算,可以得到工程上满意的精度。然而,工业机器人用薄壁四点接触球轴承套圈壁厚很薄,在外加载荷作用下容易发生弹性变形。轴承套圈的弹性变形对轴承应力、应变和载荷分布有直接的影响[7]。在这种情况下,采用Hertz接触理论对该轴承进行分析计算会产生很大的误差。而通过建立合理的轴承有限元分析模型,根据工况条件施加载荷和约束,不仅可以分析轴、轴承和轴承座的刚性情况,为轴承座的优化提供依据,还可以对轴承进行整体和局部的有限元分析,对轴承内部应力、应变及载荷分布状况进行精细化求解[8],提高轴承的设计分析水平和可靠性。
图2和图3分别为某工业机器人用薄壁四点接触球轴承在倾覆力矩作用下的位移云图和每个钢球与沟道的接触应力分布云图。可以看出,利用有限元分析手段可以方便地对薄壁四点接触球轴承的应力、应变及载荷分布进行分析。
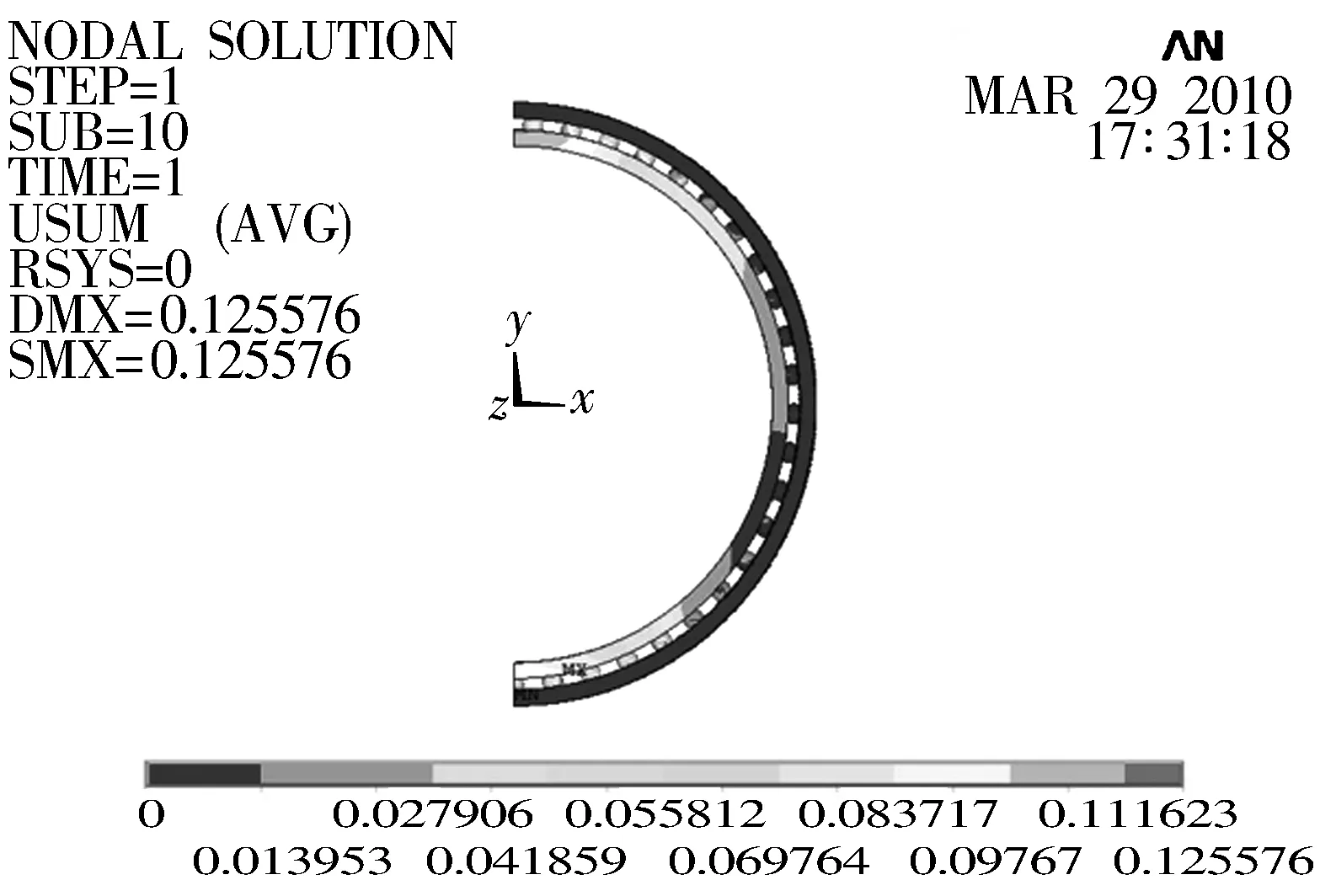
图2 位移云图
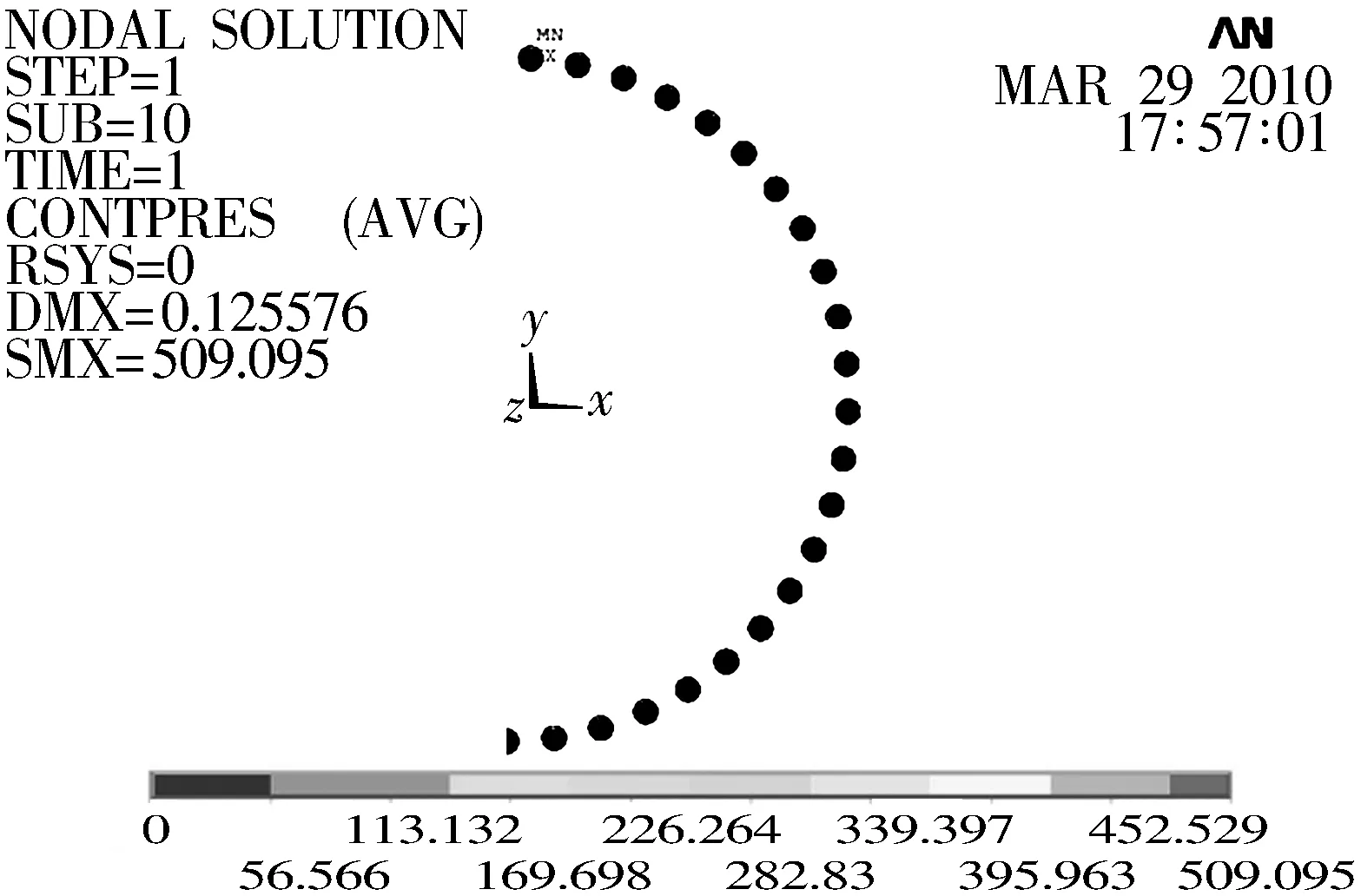
图3 钢球的接触应力云图
6 结束语
工业机器人用薄壁四点接触球轴承特殊的结构和使用要求,决定了其设计上与通用轴承考虑的问题有所差异。因此,机器人轴承的设计要以经典的轴承设计理论为基础,并采用多目标优化设计、有限元分析技术等先进的设计手段,提高产品的设计水平。
随着工业机器人技术研究开发和工程应用的不断深入,对工业机器人专用配套轴承的使用性能和技术要求提出了更新、更高的要求。为适应这种趋势和要求,必须及时掌握工业机器人及其配套轴承的发展态势和新技术,并在轴承的设计理论、设计方法和设计手段上不断完善并有所突破,从而提高配套轴承的设计水平,推动工业机器人产业的发展。
猜你喜欢
新作文·小学低年级版(2022年6期)2022-08-30
数学小灵通(1-2年级)(2022年6期)2022-06-17
昆钢科技(2021年2期)2021-07-22
汽车工程(2021年12期)2021-03-08
哈尔滨轴承(2020年4期)2020-03-17
模具制造(2019年7期)2019-09-25
创新作文(小学版)(2018年31期)2018-05-16
设备管理与维修(2018年2期)2018-02-09
广西电力(2016年4期)2016-07-10
凿岩机械气动工具(2015年3期)2015-11-11