基于方位波数域聚束模式PFA的运动补偿新方法研究
2010-05-18 08:51:14孙光才邢孟道
电子与信息学报 2010年11期
杨 磊 唐 禹 孙光才 邢孟道 保 铮
(西安电子科技大学雷达信号处理国家重点实验室 西安 710071)
1 引言
聚束式合成孔径雷达[1-3]通过控制天线相位中心(APC)的指向使得雷达波束在整个合成孔径时间内始终照射地面的固定区域,增加了成像的相干积累时间,从而提高了方位向分辨率,因此是一种有效的高分辨成像手段。目前针对聚束式SAR主要的成像算法有 RMA,PFA及 WPFA[4]等。从应用角度来看,PFA算法以其较高的运算效率成为研究的热点[3,5,6]。经典的极坐标算法根据聚束模式的成像特点,通过以场景中心为成像处理的参考点,分别进行距离向和方位向的去斜率处理,再将数据进行极坐标到直角坐标的2维插值,最后进行2维IFFT从而有效地重建聚束式SAR图像。但是机载SAR在飞行过程中容易受到大气湍流的影响,使得载机不可能做理想的匀速直线飞行,从而导致回波相位畸变,最终造成成像质量的恶化。载机的运动误差可以分为两类[7]:第1类是转动误差,这类误差随着现代雷达伺服系统对雷达射线的精确控制已经比较小,可以忽略不计,而且这种误差一般引起的是幅度调制;第2类是平动误差,主要是由于载机的非匀速直线运动造成的,这种平动的运动误差会造成回波相位的畸变,影响方位向相位的相干性,其中一次相位误差将造成图像的几何形变;二次相位误差将造成主瓣展宽及旁瓣电平升高,使得图像轮廓模糊,分辨率下降;三次及更高次的相位误差将使压缩波形产生非对称畸变,旁瓣电平升高等一系列问题,严重时产生虚假目标。
由于目前国内惯导技术尚不成熟,精度还不能满足高分辨成像的需求,因此为了实现对运动误差的补偿,基于回波数据的运动补偿方法是应用的主流,传统的这类运动补偿方法大多是基于时域的条带模式运动补偿[8-10]。文献[8]论述了沿距离向空变的二阶运动误差的补偿问题,但是对于方位向引起散焦的误差相位项并没有给出解决方法;文献[9]说明了运用方位向划分子孔径来补偿沿方位向空变的相位误差方法,但是该方法容易受到子孔径数据时间带宽积的约束,无法补偿高频误差项,补偿精度有限;文献[10]主要说明了运用Extended Omega-K(ω-k)算法在波数域实现运动补偿,但该算法应用stolt插值不仅运算量比较大而且成像质量受插值精度的影响也很明显,因而不适合聚束式成像的运动补偿。
在实际的聚束式 SAR数据获取过程中,由于SAR载体的运动误差同样会造成回波信号的畸变和失真,如果不采取运动补偿会导致成像质量下降,甚至不能成像。当前聚束模式运动补偿大多是对原始数据直接采用传统条带式时域运动误差估计及补偿方法,同时为了提高聚焦精度结合了PGA技术,PGA是一种较为有效的自聚焦方法,在很多成像雷达系统中被应用。但是由于聚束模式直接数据获取为极坐标格式如果应用传统方法进行估计和补偿其精度必然有限,而且 PGA的引入会增加程序运算量和处理复杂度,进而增大了成像方法的实时实现难度,因此有必要研究聚束模式下特定的运动补偿新方法。文献[11]论述了用多特显点方法运动补偿后再进行PFA聚束成像的算法,但是其成像质量受到特显点选取的很大制约;文献[12]主要说明了用方位向的非均匀插值补偿航线误差和前向速度变化的误差,但该方法必须将方位向输出的采样间距预先计算并存储才能减小计算量,因此增加了实时处理的实现难度。
基于目前的研究情况和实际需求,为了实现对聚束模式成像中的运动误差更加精确的补偿,得到更加清晰的聚束式SAR图像,本文在传统PFA的基础上,提出一种基于方位波数域的运动补偿新方法,该方法在对回波进行2维调频率去斜的基础上,通过距离向傅里叶变换和2维sinc插值操作将原始数据转换到2维波数域的直角坐标系下,然后应用距离和方位分块操作,并在方位波数域内完成对应子块误差相位的精确估计,同时将其拟合至整个数据域的支撑区,最后完成运动误差相位的补偿。本文内容安排如下:第2节推导并分析了运动误差相位的解析表达式,同时得到了需要进行补偿的相应的散焦误差相位项;第3节给出了结合本文方法的PFA成像算法流程;第4节采用了两种不同的补偿方法对实测数据进行处理,并对处理结果进行了有效分析,分析证实了本文所提出方法的有效性,同时验证了相对传统时域运动补偿方法本文所述方法的优越性。
2 运动误差相位推导及分析
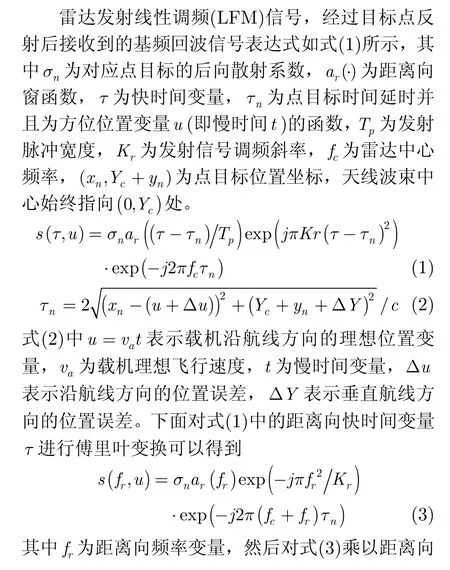
聚束模式 SAR在成像过程中控制其波束中心指向始终对准成像区域的中心,其示意图如图1所示,为了方便起见下面的推导均在2维斜平面进行,并且仅讨论单个目标点的情况。

图1 带有运动误差的聚束SAR示意图

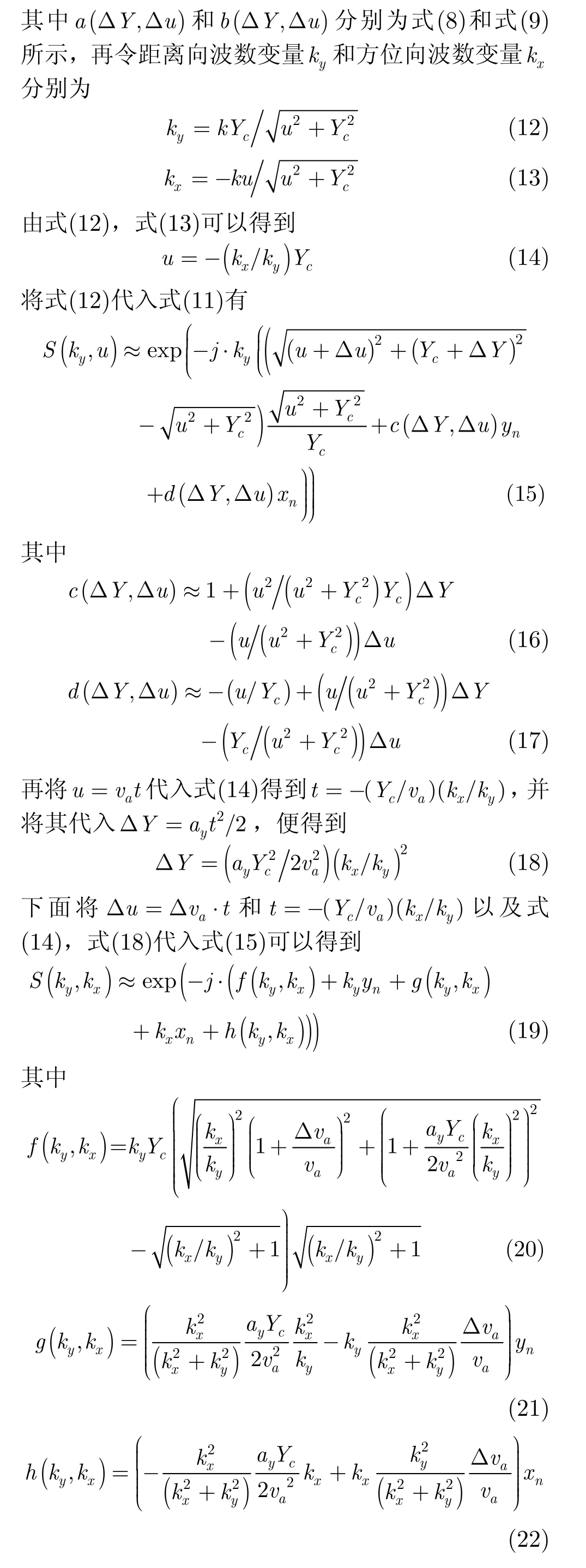
从上面推导可得,式(19)为散射点回波信号的 2维波数域表达式,如果运动误差Δva和ay均为零,则式(20)-式(22)也均等于零,此时式(19)退化为标准经典极坐标算法下的回波信号表达式,再对其进行2维IFFT后就可以得到清晰的聚束模式SAR图像。但是由于运动误差的存在,导致回波表达式中引入了3个运动误差相位项,进而造成图像的几何形变以及散焦等变化,如果可以分别对其进行补偿,则可以重建原来的聚束式SAR图像,从而解决由于运动误差造成的图像质量下降问题。其中式(20)为运动误差的非空变项,表示与目标的距离位置和方位位置无关的误差项,在对该项运动误差进行精确估计后,可以对数据进行统一的补偿;式(21)为沿距离向空变的误差项,表示在方位位置相同而距离位置不同的目标点,相同运动误差对回波相位具有不同影响的误差项,该项会引起沿距离向空变的方位散焦,对于该误差项的处理可以在方位分块的基础上再对距离进行分块处理,假设在距离小块内运动误差的空变性可以忽略,并对该小块内的运动误差精确估计,然后在方位向将误差拟合至全孔径下,此时不但得到了每个距离单元内沿整个合成孔径的相位误差变化曲线,即方位误差相位项,而且也拟合出方位子块内沿距离向的空变变化曲线,这样可以得到沿距离向空变的误差相位项,最后沿距离向进行补偿就可以消除该项所引起的散焦影响。式(22)为沿方位向空变的误差项,表示在距离位置相同而方位位置不同的目标点,相同运动误差对回波相位影响不同的误差项,由于方位向在处理过程中没有进行类似距离压缩的处理,所以该项是无法进行估计和补偿的,而且在方位向上采用子孔径技术进行成像,其方位空变误差相位比较小,可以忽略其影响。继续观察式(19)可见,此时得到的该表达式为2维波数域下带有运动误差的回波表达式,其中变量ky和kx分别为距离向波数变量和方位向波数变量,这里需要说明的是在传统意义下的波数变量应该是与频率相对应的,例如距离波数变量应与距离向频率相对应,方位波数变量应与方位向多普勒频率相对应,但是本文中并没有进行方位向FFT因此所涉及的方位向波数变量与传统的波数变量有所不同,根据式(13)在进行方位插值后可以将本文所提及的方位波数变量与传统波数变量一样对待进行处理,在运动补偿后运用方位向IFFT实现成像,后面的实测数据处理证实了这种方法的可行性。
下面继续分析式(20)-式(21)进而导出引起方位散焦的误差相位项,令式(20)中

3 算法流程
通过上面的理论分析和推导我们已经得到带有运动误差的雷达回波在PFA下的2维波数域显式表达式,从中得到了需要进行补偿的误差非空变项和误差空变项,从而得出对应于本文提出的基于极坐标算法(PFA)聚束模式运动补偿的具体实现流程,如图2所示。
在图2所示的算法流程中,首先将得到的回波数据做距离向 FFT如式(3)所示,变化到距离频率域,再与距离参考函数相乘完成距离向的频率去斜,并按方位单元依次和式(10)相乘完成方位向dechirp操作,然后根据经典极坐标算法(PFA)完成距离和方位的重采样,将原始极坐标数据应用式(12)和式(13)插值到直角坐标系的2维波数域内,即距离向ky维和方位向kx维,在这里插值操作应用sinc插值,其插值精度较高,接下来的运动误差估计[3,7,13,14]和误差的补偿都是基于上面推导的2维波数域下实现的。其中运动误差估计应用图像偏置(MD)法,该方法估计性能稳定,能够实现对二次运动误差较精确的估计,即引起散焦的运动误差。
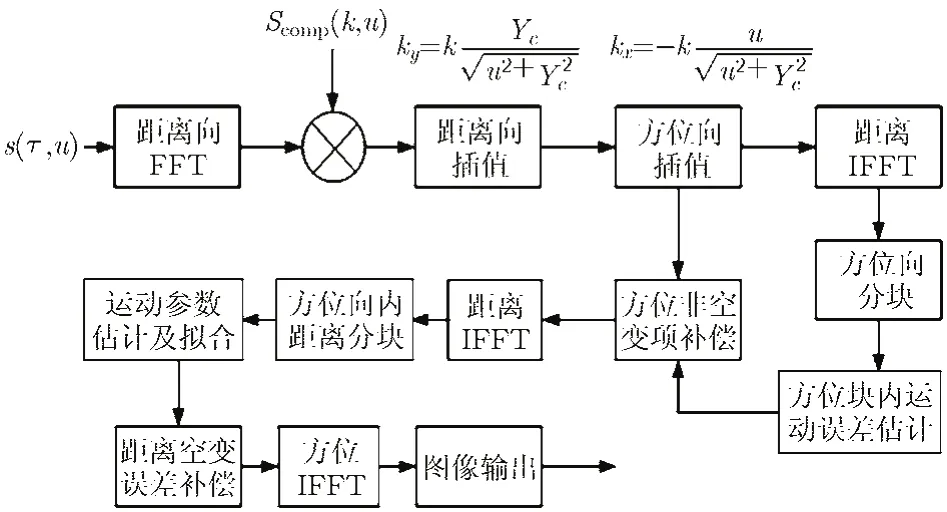
图2 本文所述方法流程图
运动误差的估计和补偿分两步进行,并且在估计和补偿过程中采用分块技术实现,以达到估计精度较高的目的。第1步在数据的2维波数域下先进行距离向 IFFT以及方位重叠分块,按方位块估计方位向多普勒参数进而得到对应相位误差的估计值,并在2维波数域完成相应的包络(包括由于平台径向运动引起的距离包络偏移)补偿和粗的相位补偿;第2步再在此基础上进行距离IFFT对每个方位子块进行距离分块,在方位波数域下估计随距离空变的运动误差,将各距离子块的误差沿方位向拟合得到整个方位支撑区的误差变化曲线,同时得到在距离向上的空变误差变化规律,完成沿距离空变的更加精细的相位补偿,此时距离向已变化到时域。最后通过方位向逆傅里叶变换操作输出聚焦效果良好的聚束式SAR图像。
4 实测数据分析
实际中由于载机运动的不稳定性,使得录取回波数据时运动误差会导致图像严重的散焦。下面将应用上一节提出的算法流程进行实测数据分析验证,所处理数据为机载聚束模式X波段数据,距离和方位分辨率均为 0.3 m,距离向经距离压缩后为4096点,方位向为32768点,重复频率为1250 Hz,由此可得方位向的合成孔径时间达 32768/1250=26.2144 s,处理时方位向经过截取输出结果图像方位为8192点。该合成孔径时间相对一般条带SAR 10 s左右的合成孔径时间比较大,并且由于该时间的增加,会导致较小的运动误差在飞行过程中逐渐积累增大,进而造成对回波数据相位严重的影响,难以满足距离和方位高分辨成像的要求。
图 3所示为没有采用运动补偿,而直接应用PFA进行成像的结果,其方位散焦非常严重。图4为应用时域运动补偿和极坐标算法并结合距离和方位PGA方法得到的聚束SAR图像,其成像效果有很大改善,对图像散焦的抑制有明显效果。图5为应用本文所述方法,在数据的方位波数域下进行误差估计和补偿且并没有应用 PGA所得到的聚束SAR图像。通过与图4的对比可见该方法比传统的时域补偿方法结果有明显提高,并且在实际处理中该方法的计算时间仅为处理图4结果所需时间的一半。下面将对传统时域运动补偿方法和本文方法进行细节的对比分析。
首先提取图4和图5所示的圆圈处场景进行对比,结果图像如图6和图7所示。在对比中可以看到本文方法在补偿精度和补偿效果上比传统时域运动补偿有很大提高。其中图6传统时域补偿将方位向由于运动误差导致的散焦和图像失配等现象有所抑制和消除,但是在补偿之后图像聚焦效果(如图中圈1所示)还不是很理想,地物轮廓(如图中圈2所示)还不是很清晰。图7基于方位波数域PFA的运动补偿,在对运动误差的估计和补偿精度上更为精确,处理的结果图像聚焦效果明显提高,地物轮廓分明而且对比度和信噪比更高,图像锐化度更好,从而证明了本文提出方法有着更加良好的补偿效果。

图3 未运动补偿的聚束图像
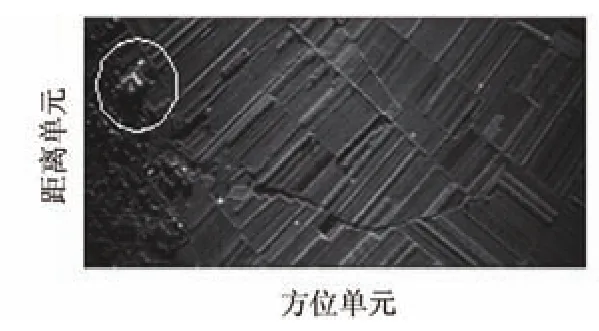
图4 传统时域运动补偿的聚束图像

图5 本文方法运动补偿的聚束图像
然后讨论运动补偿对方位向相位的补偿效果。根据理论分析可知,在没有任何运动误差的情况下,场景中某一孤立点其距离单元所对应的方位向相位在方位向 IFFT之前应该是一条标准的斜直线,该直线的斜率代表了该距离单元方位向多普勒频率值,此时对该点方位向进行IFFT则可以完全对点目标进行聚焦成像,但是由于运动误差的存在,导致该相位曲线偏离直线,其线性程度下降,所以在运动补偿过程中对相位误差补偿的越彻底越完全,得到该点最终的方位向相位越趋近于直线,进而可以获得质量较好的聚束式 SAR图像。基于以上讨论,本文在图6和图7中选取了同一场景特显点(如圈3所示)对应的距离单元分析其方位向相位,分析时需要在处理流程中方位 IFFT之前的数据域提取该距离单元对应的方位向 4096点,讨论其相位变化。图8为没有运动补偿时该特显点对应的方位向相位,其相位偏离标准斜直线的程度较大,可见运动误差对相位的影响很明显,也就直接导致了图像的模糊和散焦;而图9为时域运动补偿的相位结果和本文方法运动补偿的相位结果对比,其中时域运动补偿效果明显,消除了运动误差引起的大部分非线性项,但相位中还包含了一定的残余相位误差,导致补偿效果不能满足聚束高分辨成像的要求,而基于方位波数域 PFA的运动补偿方法实现了对相位误差更加精细的补偿。
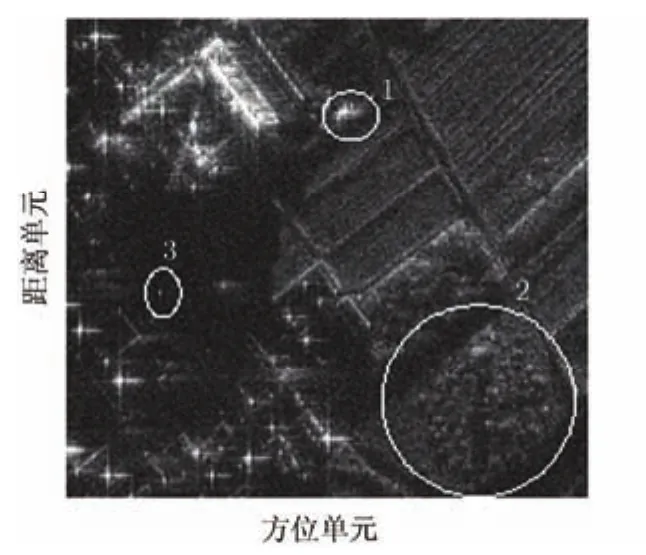
图6 时域运动补偿细节图像

图8 运动补偿之前相位

图9 两种方法补偿相位的结果对比
最后,对于SAR图像聚焦效果的衡量可以用图像对比度[15]和图像信息熵[16]来表示。图像对比度越大,信息熵越小表示图像的聚焦效果越好,图像的信息量越充足。本文对图3-图5对应的场景图像应用对比度和信息熵进行计算分析,结果如表1所示,对应图像方位向8192点,距离向4096点。从表中数据可见,相比传统的时域运动补偿,基于方位波数域 PFA的运动补偿方法在图像对比度和图像信息熵的改善上都有很明显的效果。
另外本文给出另一组数据处理的对比结果,证明本文提出的方法具有广泛的适用性。从下面图10-图12可见,由于时域运动补偿对运动误差高次项的估计和补偿不够精确,导致场景点目标对应信号旁瓣电平较高,图像轮廓模糊。而运用本文提出的运动补偿方法即图2所示处理流程得到的聚束SAR图像其清晰度和对比度都明显优于传统时域补偿的结果,对比图11和图12中对应的圆圈处场景效果更加明显。

表1 运动补偿效果对比
5 结束语
本文首先通过聚束模式的成像几何模型得到存在运动误差情况下回波信号的表达式,并且在极坐标算法下推导得到2维波数域直角坐标系下需要进行补偿的运动误差非空变相位项和空变相位项,从而提出相应相位误差项的估计和补偿方法。然后在此基础上提出了基于方位波数域 PFA的运动补偿处理算法流程,并进行了实测数据分析和验证。最后通过与传统时域运动补偿方法进行成像比较,验证了本文提出方法的优越性和有效性。同时该方法避免了计算量较大的 PGA计算过程,适用于实时聚束成像处理,并得到了稳定清晰的聚束式SAR图像。

图10 未运动补偿的聚束SAR图像

图11 时域运动补偿结果截图

图12 本文方法运动补偿结果截图
[1] Eineder M, Adam N, and Brcic R. High bandwidth spotlight SAR interferometry with TerraSAR-X[C]. IGARSS 2008,Boston, USA, 2008, 2: II113-II116.
[2] Tan Wei-xian, Li Dao-jing, and Hong Wen. Airborne spotlight SAR imaging with super high resolution based on back-projection and autofocus algorithm. IGARSS 2008,Boston, USA, 2008, 4: IV1300-IV1303.
[3] Carrara G, Goodman S, and Majewski M. Spotlight Synthetic Aperture Radar Signal Processing Algorithms[M].Boston & London: Artech House, 1995, Chapter 3.
[4] Carrara G, Goodman S, and Ricoy M A. New algorithms for widefield SAR image formation[C]. Proc. IEEE Radar Conference 2004, Philadelphia, USA, 2004: 38-43.
[5] Tang Yu, Xing Meng-dao, and Bao Zheng. The polar format imaging algorithm based on double Chirp-Z transforms[J].IEEE Geoscience Remote Sensing Letters,2008, 5(4):610-614.
[6] Zhu Dai-yin, Ye Shao-hua, and Zhu Zhao-da. Polar format algorithm using chirp scaling for spotlight SAR image formation[J].IEEE Transactions on Aerospace and Electronic Systems,2008 , 44(4): 1433-1448.
[7] 保铮, 邢孟道, 王彤. 雷达成像技术[M]. 北京: 电子工业出版社, 2005, 第7章.
[8] Fornaro G. Trajectory deviation in airborne SAR: analysis and compensation[J].IEEE Transactions on Aerospace and Electronic Systems, 1999, 35(3): 997-1009.
[9] Prats P, Reigber A, and Mallorqui J J. Topographydependent motion compensation for repeat-pass interferometric SAR systems[J].IEEE Transactions on Geoscience Remote Sensing, 2005, 2(2): 206-210.
[10] Reigber A, Aliviazatos E, and Potsis A. Extended wavenumber-domain synthetic aperture radar focusing with integrated motion compensation[J].IEE Proceedings. Radar Sonar and Navigation, 2006, 153(3): 301-310.
[11] Fu Wen-xian, Li Shao-hong, and Hong Wen. Motion compensation for soptlight SAR mode imaging[C]. 2001 CIE International Conference on Radar, Beijing, China, 2001:938-942.
[12] Yuan Y, Sun J, and Mao S. PFA algorithm for airborne spotlight SAR imaging with nonideal motions[J].IEE Proceedings Radar Sonar and Navigation, 2002, 149(4):174-182.
[13] Xing Meng-dao, Jiang Xiu-wei, Wu Ren-biao, Zhou Feng, and Bao Zheng. Motion compensation for UAV SAR based on raw radar data[J].IEEE Transactions on Geoscience Remote Sensing, 2009, 47(8-2): 2870-2883.
[14] 李刚,许稼,彭应宁,夏香根. 一种稳健的机载雷达杂波多普勒参数估计方法[J]. 电子与信息学报, 2007, 29(12):2867-2870.Li Gang, Xu Jia, Peng Ying-ning, and Xia Xiang-gen. A robust algorithm of doppler parameters estimation for airborne radar.Journal of Electronics&Information Technology, 2007, 29(12): 2867-2870.
[15] 刘碧丹,韩松,王岩飞. 图像幅度和值最小化自聚焦算法[J].电子与信息学报, 2009, 31(4): 768-771.Liu Bi-dan, Han Song, and Wang Yan-fei. Minimizing sum of image amplitudes autofocus algorithm[J].Journal of Electronics&Information Technology, 2009, 31(4): 768-771.
[16] 邢孟道, 保铮. 基于运动参数估计的 SAR成像[J]. 电子学报,2001, 29(12): 1824-1828.Xing Meng-dao, and Bao Zheng. Motion parameter estimation based SAR imaging[J].Acta Electronic Sinica,2001, 29(12): 1824-1828.
猜你喜欢
声学技术(2023年4期)2023-09-14 01:00:12
电子测试(2022年16期)2022-10-17 09:32:26
幼儿园(2021年12期)2021-11-06 05:10:20
测控技术(2018年11期)2018-12-07 05:49:02
系统工程与电子技术(2016年7期)2016-08-21 13:59:14
中国修辞(2016年0期)2016-03-20 05:54:32
幼儿100(2016年28期)2016-02-28 21:26:17
火控雷达技术(2016年2期)2016-02-06 02:29:00
西北工业大学学报(2015年4期)2016-01-19 03:31:55
电测与仪表(2015年2期)2015-04-09 11:28:50