基于FPGA设计EnDat编码器数据采集后续电路
2010-05-12 03:15张涛
山西电子技术 2010年3期
张 涛
(国营第七八五厂,山西太原030024)
0 引言
EnDat接口是HEIDENHAIN专为编码器设计的数字式、全双工同步串行的数据传输协议,具有传输速度快、功能强大、连线简单、抗干扰能力强等优点,是编码器、光栅尺数据传输的通用接口。由于使用了串行传输方式,所以只需四条信号线,在后续电子设备的时钟激励下,数据信息被同步传输。数据类型(位置值、参数、诊断信息等)由后续电子设备发送给编码器的模式指令选择决定。编码器利用自然二进制、循环二进制(格雷码)或PRC码对码盘上的物理刻线进行光电转换,将连接轴的转动角度量转换成相应的电脉冲序列并以数字量输出。它具有体积小、精度高、接口数字化及绝对定位等优点,被广泛应用于转台、机器人、数控机床和高精度伺服系统等诸多领域。
1 EnDat接口介绍
1.1 EnDat接口的特点
(1)高性能低成本:通用的接口适用于所有的增量和绝对式编码器,更经济的电能消耗,小的尺寸和紧凑的连接方式,快速系统配置,零点可根据偏置值浮动。
(2)更好的信号质量:编码器内部特别的优化提高了系统精度,为数控系统提供更好的轮廓精度。
(3)更好的实用性:自动系统配置功能;数字信号提高了系统的可靠性;监控与诊断信息有利于系统的安全;冗余码校验有利于可靠的信号传输。
(4)提高了系统的安全性:两个独立的位置信息及错误信息位,数据的校验和应答。
(5)适用于先进的技术发展:(高的分辨率、短的控制周期,最快16 M时钟,安全设计理念)适用于直接驱动技术。
1.2 EnDat2.2编码器性能的提高
(1)传输位置值与附加信息可同时传输:附加信息的类型可通过存储地址选择码选择。
(2)编码器数据存储区域包括编码器制造商参数、OEM厂商参数、运行参数、运行状态,便于系统实现参数配置。
(3)EnDat2.2编码器实现了全数字传输,增量信号的处理在编码器内部完成(内置14 Bit细分),提高了信号传输的质量和可靠性,可实现更高的分辨率。
(4)监控和诊断功能,报警条件包括:光源失效、信号幅值不足、位置计算错误、运行电压太低或太高、电流消耗太大等;当编码器的一些极限值被接近或超过时提供警告信号。
(5)更宽的电压范围(3.6~14 V)和传输速率(16 M)。

图1 EnDat接口编码器数据采集原理图
1.3 时序和OEM数据存储
在每一帧同步数据传输时一个数据包被发送,传输循环从时钟的第一个下降沿开始测量值被保存,计算位置值。在两个时钟脉冲(2T)后,后续电子设备发送模式指令“编码器传输位置值”(带或不带附加信息)。在计算出了绝对位置值后(见图2),从起始位开始编码器向后续电子设备传输数据,后续的错误位F1和F2(只存在于EnDat2.2指令中)是为所有的监控功能和故障监控服务的群组信号,他们的生成相互独立,用来表示可能导致不正确位置信息的编码器故障。导致故障的确切原因保存在“运行状态”存储区,可以被后续电子设备查询。
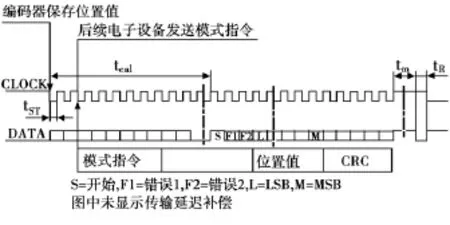
图2 无附加信息的位置传输
从最低位开始,绝对位置值被传输,数据的长度由使用的编码器类型决定。传输位置值所需的时钟脉冲数保存在编码器制造商的参数中。位置值数据的传输以循环冗余检测码结束。
位置值如果带附加信息,紧接在位置值后的是附加信息1和2,他们也各以一个CRC结束(见图3)。附加信息的内容由存储区的选择地址决定,然后在后面的采样周期里被传输。在后续的传输中一直传输该信息,直到新的存储区被选择。在数据字的结尾,时钟信号必须置高电平。10~30 μs或1.25~3.75 μs(EnDat可编程的恢复时间 tm)后,数据线回到低电平,然后,新的数据传输可在新的时钟信号下开始。
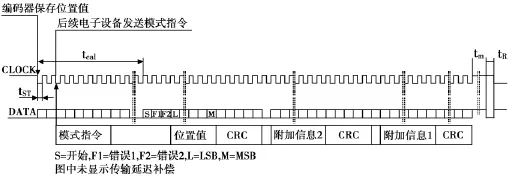
图3 带附件信息的位置传输
同时,编码器为参数提供了不同的存储区,它们可以被后续电子设备读取,这些区域可以被编码器制造商、OEM厂商甚至最终用户写入。一些特定的区域是可以被写保护的。不同系列的编码器支持不同的OEM存储区和不同的地址范围。因此,每一个编码器必须读取OEM存储区的分配信息。基于此原因,后续电子电路应基于相对地址编程,而不能使用绝对地址。
2 EnDat接口后续电子设备的电路设计方案
全数字化交流伺服系统中采用TMS320F2812作为控制器,用以实现位置环、速度环和电流环以及SVPWM、电压和电流采样等功能。此外,采用 Altera公司的型号为EP1C6Q240C8的Cyclone系列FPGA实现与编码器接口、译码逻辑等功能。同时,在FPGA内部实现了128B的双口RAM,通过总线实现与DSP之间的数据传输,功能框图如图4所示。

图4 功能框图
FPGA内部分为时钟发生模块、发送模块、接收模块、双口RAM模块、发送使能模块5个部分。首先,由时钟发生模块产生周期为0.5 μs的方波信号,取名为CLOCK,此信号作为通讯同步时钟信号。在CLOCK的每个时钟上升沿计数变量COUNT自加1,变量COUNT的初始值为0。当发送使能模块检测到COUNT的值为3时,说明编码器已经将位置值保存完毕,发送使能模块使SENT_EN信号有效,发送模块开始发送6位模式指令。当检测到COUNT的值为9时,停止COUNT在每个时钟上升沿计数,停止发送数据并使接收使能信号RECEIVE_EN有效,从而使能接收模块。接收模块开始检测数据输入信号的上升沿,一旦上升沿到来说明收到数据起始位S,启动COUNT在每个时钟上升沿计数,以后在每个时钟信号的上升沿保存位置值,直到检测到COUNT的值为39时,停止接收数据,由接收模块向双口RAM模块的A口写入要保存的位置值,从而结束一次FPGA与编码器的通讯过程。由于每次通讯时间是严格固定的,设系统时钟为2 MHz。FPGA为主叫,当时钟下降沿到来时,编码器保存位置值要2个时钟周期,向编码器发送“请求数据”控制字共6位“000111”,需时6个时钟周期,编码器向FPGA共发送1个起始位、2个“错误位”、23位位置值和5位CRC校验位要31个时钟周期,共39个时钟周期,所以每次通讯需要19.5 μs的时间,并且每个时刻具体需要传递哪一位数据也是严格确定的。因此采用基于时基的设计方法(见图5)。
在FPGA内部实现了128 B的双口RAM空间,A口具有8位数据线,7位地址线,用于与编码器通讯,B口具有16位数据线,7位地址线,用于与DSP通讯,因为TMS320F2812为16位DSP,所以与FPGA中RAM的数据传递极为方便。DSP在每个电流环周期发送一个有效的“BEGIN”信号,19.5 μs之后,码盘信号接收模块将接收到数据存入FPGA内部双口RAM的A口中,并按顺序排列成16位数据的形式,然后向DSP发送“END”信号,表示一次通讯结束,DSP接收到中断之后从FPGA的双口RAM的B口中读取数据,完成一次通讯。

图5 时钟频率与数据传输

图6 程序流程图
对FPGA的开发采用XILINX公司的ISE集成环境,硬件描述语言为Verilog HDL语言。图6为程序流程图。
3 结束语
本文设计了一种基于FPGA的编码器接口,用以进行编码器和伺服驱动器DSP处理器之间的通讯,并且具有CRC校验等纠错功能。本文给出了硬件连接和FPGA程序设计流程,可以实现对永磁同步交流电机磁极位置准确的读取。
[1]林灶生.Verilog FPGA芯片设计[M].北京:北京航空航天大学出版社,2006.
[2]谢青红,张筱荔.TMS320F2812 DSP原理及其在运动控制系统中的应用[M].北京:电子工业出版社,2009.
猜你喜欢
山东冶金(2022年4期)2022-09-14
军民两用技术与产品(2022年6期)2022-08-06
电气电子教学学报(2021年4期)2021-08-24
成都信息工程大学学报(2018年3期)2018-08-29
制造技术与机床(2017年7期)2018-01-19
CHINESE JOURNAL OF AERONAUTICS(2017年2期)2017-11-20
电子器件(2015年5期)2015-12-29
空间控制技术与应用(2015年1期)2015-06-05
广西科技大学学报(2015年4期)2015-02-27
电子设计工程(2015年11期)2015-01-16