轴的跳动位移在线检测系统设计
2010-05-12 03:15崔焱,秦颖
山西电子技术 2010年3期
崔 焱,秦 颖
(河南省工业科技学校,河南新乡453003)
0 引言
轴作为广泛使用的机械器件,其正常转动的理想状态是轴颈的圆心与轴孔中心线是重合的,但在实际运行时由于振动、负荷过大等原因轴颈的轴心往往偏离轴孔的中心,偏离的距离越大,对轴的损坏越大,还会引起轴瓦和轴颈之间产生严重的摩擦、磨损,严重时还会导致恶性事故的发生。因此,轴的跳动位移测量是对轴承运行状态进行诊断和控制的关键技术[1]。
1 测量原理
本系统采用在轴的水平和垂直两个方向上测量轴的跳动位移,传感器固定的位置为:在轴静止时,水平方向沿着轴水平中心线进行固定,垂直方向沿着垂直中心线固定,距离轴的起始距离分别为a、b。当轴转动后由于轴的跳动,传感器与轴的距离会发生改变,设定轴转动后传感器与轴的直线距离分别为a′、b′,如图1所示,则在水平和垂直方向上跳动位移分别是:

当X>0时,轴在水平方向向右跳动;当X<0时,轴在水平方向向左跳动。

当Y>0时,轴在垂直方向向上跳动;当Y<0时,轴在垂直方向向下跳动。
2 测量系统的设计
依据公式(1)(2),需要同时测量出轴颈在X轴方向和Y轴方向相对于轴孔中心线的跳动量X、Y,因此要对两路信号同时采集。本系统设计了两通道的信号采集测量系统,它主要由光电转换模块、采样保持放大电路模块、模数转换模块、数据处理模块、数据显示模块组成。
2.1 光电转换模块的组成
光电转换模块主要由:一支DG650-13-3半导体激光器、四根纤芯直径为1 mm,数值孔径为0.5的塑料光纤和两个OPT101光电二极管组成。
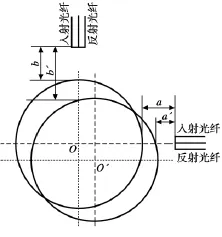
图1 轴的跳动位移测量原理图
2.2 采样保持放大电路的设计
采样保持电路中采用LF398采样保持器,它具有采样速度快、保持下降速度慢、精度高等特点,采样时间小于6 μs时精度可达0.01%;电源电压可在±5 V和±15 V之间变化,其电路连接图如图2所示:

图2 LF398电路连接图
图2中8和7引脚分别为逻辑电平和逻辑参考电平,用于控制其工作方式;当8为低电平时,电路工作在采样状态,反之,电路工作在保持状态,另一路采样保持电路与图2相同。
放大电路中核心器件是OP-07,由于OP-07运算放大器输出端的电压在-15 V~+15 V变化,远远超过AD转换器件TLC0820的信号电压输入范围,一旦超过TLC0820限定的最大输入值VCC+0.1 V就会烧坏TLC0820芯片,因此在放大电路之后要接保护电路。保护电路是在OP-07输出端分别接一个8.2 k和3.6 k的电阻,并反向接一个二极管,TLC0820的信号输入端接在8.2 k和3.6 k两个电阻之间的节点处,这样不会超过TLC0820的VREF+的值。
2.3 模数转换模块的设计
本系统以TLC0820为模数转换器件,TLC0820是一种经过改进的高速并行的8位模数转换器,8位数据三态并行输出,读方式最快转换时间为2.5 μs,不需外部时钟和振荡元件能很好地与各种微处理器连接。通过MODE的设置,TLC0820可工作在读和写读两种方式,当MODE为低电平时转换器为只读方式,当MODE为高电平时转换器为写读方式[2]。
2.4 单片机选型
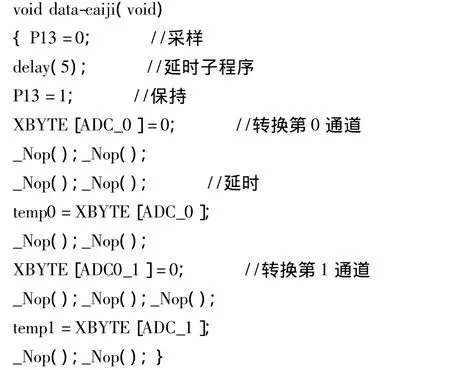
本系统选用AT89S52作为核心器件,用作数据处理。目前,AT89S52被广泛的使用,成本越来越低,其在作为测量滑动轴承偏心距的核心部件时,不仅具有运行速度快、兼容性强的特点,而且可以降低产品开发和生产成本,能够满足本检测系统的要求,模数转换和信号采集程序部分代码如下所示[3]:
2.5 数据显示模块的设计
为了便于操作者在现场对滑动轴承的运行状况进行诊断,设计了即时显示模块。采用LMB162A字符型液晶器,这种液晶显示器主要是通过4、5、6三个引脚来控制液晶的显示,RS、R/W、E分别与单片机的P1.0、P1.1和P1.2三个管脚相连,要显示的数据由P0口并行输出,与液晶显示器的8位数据口相连,属于非总线控制方式,因此在P0口外接10 k电阻排作为上拉电阻,否则不会显示数据。
3 结束语
(1)经过对X轴方向和Y轴方向光纤位移传感器的静态特性分别标定[8],得到系统的线性范围是在与轴相距800~2 000 μm的范围内,即测量系统的线性范围是0~1 200 μm;又计算出本系统半径间隙为250 μm,即系统量程为0~500 μm,所以,本系统的线性范围满足量程的需要。我们使光纤传感器端部沿着X、Y方向轴孔中心线且离轴表面的距离为
a=b=1 200 μm.进行固定。并根据测得的数据得到反非拟合曲线。
(2)进行动态系统设计,其中数据采集流程图如图3所示:
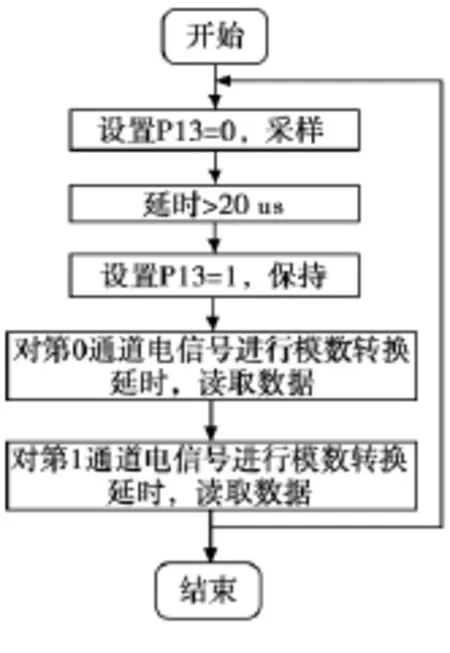
图3 数据采集流程图
经过运行本测量系统工作稳定,动态数据能显示在液晶显示器上。
(3)本系统的创新之处有三点:第一,推导出了本系统的测量原理。第二,设计了特有的轴的跳动位移在线测量系统。第三,得到了本系统的量程范围。
[1]杨黎明.机械设计手册下册[M].北京:兵器工业出版社出版,1998:202-212.
[2]谢小平.改进型高速8位ADC TLC0820及其在测光电路中的应用[J].国外电子元器件,2000,3:15 -17.
猜你喜欢
冶金设备(2021年2期)2021-07-21
制造技术与机床(2018年10期)2018-10-13
柴油机设计与制造(2018年3期)2018-10-13
哈尔滨工程大学学报(2016年11期)2016-12-12
——目镜套筒
上海计量测试(2016年1期)2016-08-03
中外医疗(2015年5期)2016-01-04
柴油机设计与制造(2015年3期)2015-12-05
锻压装备与制造技术(2015年2期)2015-06-26
锻压装备与制造技术(2015年2期)2015-06-26
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01