陆基导弹的无陀螺捷联惯导系统粗对准
2010-04-30 04:13程子健
中国惯性技术学报 2010年4期
程子健,史 震,杨 杰,岳 鹏
(哈尔滨工程大学 自动化学院,哈尔滨 150001)
传统的捷联惯导系统通常包括三个加速度计和三个陀螺仪,用陀螺仪测量载体的角速度。无陀螺捷联惯导系统用加速度计代替陀螺仪,利用加速度计比力信号解算角速度,由此带来的一系列特点使它特别适合于飞行时间较短的近程导弹[1]。无陀螺捷联惯导系统与有陀螺捷联惯导系统的最大区别是角速度的获取方式不同,针对GFSINS,国内外学者进行了广泛和深入研究,并提出了多种配置方案、理论算法和实用分析[2-5]。
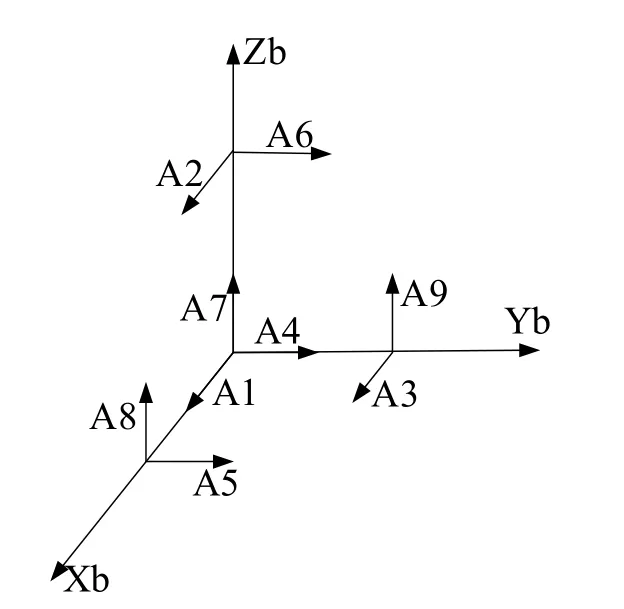
图1 九加速度计配置方案Fig. 1 Nine-accelerometer configuration scheme
初始对准是导航的关键技术之一。无陀螺捷联惯导系统在正常导航之前,必须完成初始对准过程,确定系统的姿态和初始捷联矩阵。目前关于有陀螺捷联惯导系统初始对准研究,从理论到实际应用都比较成熟,但是无陀螺捷联惯导系统初始对准的研究却刚起步,其与有陀螺捷联惯导系统初始对准在方法上有所不同。文献[6]设计了六加速度计配置方案,用积分法解算角加速度,论述了在无陀螺捷联惯导系统中不能自主式粗对准,并提出了用外部航向设备得到初始方位姿态,进而解算载体初始捷联矩阵。利用开平方法求解角速度,可解算零时刻的载体角速度,但开平方法解算角速度无法判断符号,基于陆基发射导弹的无陀螺捷联惯导系统提出了一种可行的方法判断载体角速度符号,进而完成无陀螺捷联惯导系统的自主式粗对准。
1 一种九加速度计配置方案

2 无陀螺捷联惯导系统粗对准分析

3 一种基于陆基发射导弹的无陀螺捷联惯导系统自主式粗对准方法
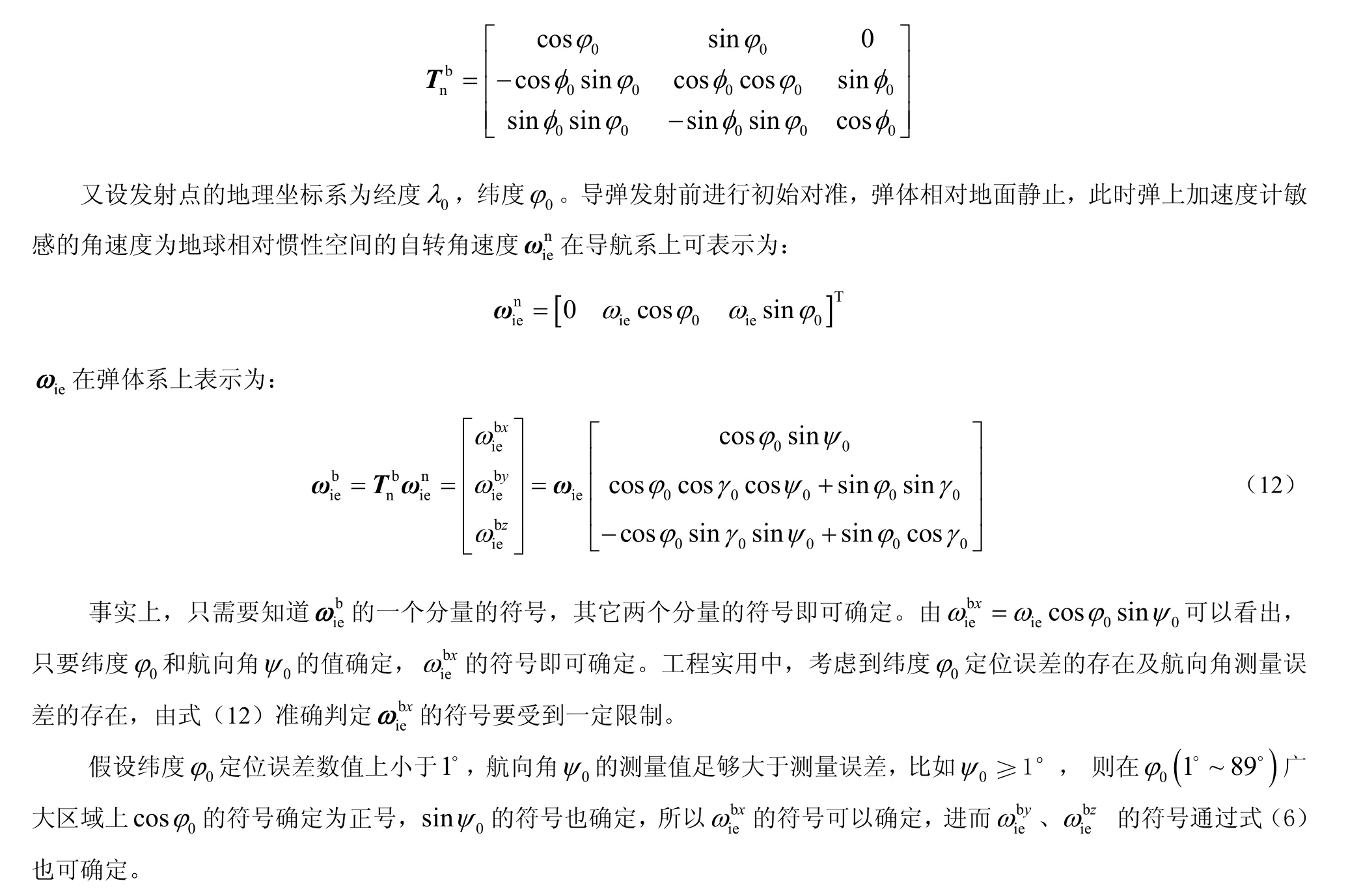
假设已用开平方法求出角速度的数值,下面介绍其符号判断方法。设导弹在发射架上相对于当地地理坐标系(发射参考系)的姿态为俯仰角0φ、航向角0ψ、滚动角0γ(一般γ0=0°),则弹体系与地理系的转换矩阵为:
4 结 论
与有陀螺捷联惯导系统初始对准不同,无陀螺捷联惯导系统初始对准中得不到地球自转角速度在载体系上的分量所以不能用传统的自主式粗对准方法来解决无陀螺捷联惯导系统静基座下初始粗对准问题。本文基于陆基发射导弹的无陀螺捷联惯导系统,利用陆基发射导弹的初始纬度和航向角的信息,在定位误差不大,航向角测量值大于测量误差情况下,可用此方法来判断解算载体角速度的符号,进而完成无陀螺捷联惯导系统在静基座下自主式粗对准。
(References):
[1] 史震. 无陀螺捷联惯导系统中加速度计配置方式[J]. 中国惯性技术学报,2002,10(7):15-19.SHI Zhen. Accelerometer allocation scheme in gyroscope free strapdown inertial navigation system[J]. Journal of Chinese Inertial Technology, 2002, 10(7): 15-19.
[2] Tan Chin-Woo, Park Sungsu. Design of gyroscope-free navigation systems[C]//2001 IEEE Intelligent Transportation Systems Conference, 2001: 286-291.
[3] Mostov K S. Design of accelerometer-based gyro-free navigation systems[D]. Berkeley: University of California, 2000.
[4] Sou-Chen Lee, Yu-Chao Huang. Innovative estimation method with likehood for all-accelerometer type inertial navigation system[J]. IEEE Transactions on Aerospace and Electronic Systems, 2002, 38(1): 339-346.
[5] Sou-Chen Lee, Cheng-Yu liu. An innovative estimation method with own-ship estimator for an all accelerometer-type inertial navigation system[J]. International Journal of Systems Science, 1999, 30(12): 1259-1266.
[6] 刘志平,郝燕玲. 无陀螺捷联惯导系统静基座粗对准实用方法[J]. 中国惯性技术学报,2009,17(2):140-144.LIU Zhi-ping, HAO Yan-ling. Practical coarse alignment method of GFSINS on stationary base[J]. Journal of Chinese Inertial Technology, 2009, 17(2): 140-144.
[7] 陈穆清,许江宁,范蓓蓓. GFSINS姿态角速度解算滤波环节设计[J]. 中国惯性技术学报,2008,16(3):282-286.CHEN Mu-qing, XU Jiang-ning, FAN Bei-bei. Design of gyroscope free SINS attitude angular velocity filter.[J]. Journal of Chinese Inertial Technology, 2008, 16(3): 282-286.
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
当代水产(2022年1期)2022-04-26
北京航空航天大学学报(2018年1期)2018-04-20
航天电子对抗(2017年6期)2017-12-17
北京航空航天大学学报(2017年5期)2017-11-23
中国惯性技术学报(2017年1期)2017-06-09
北京航空航天大学学报(2017年12期)2017-04-23
火控雷达技术(2016年1期)2016-02-06
弹箭与制导学报(2015年1期)2015-03-11
计算技术与自动化(2014年1期)2014-12-12