基于智能P I D整定的温度控制系统设计
2010-04-04 09:04:30康洁
科学之友 2010年12期
康 洁
(1.太原理工大学信息工程学院,山西 太原 030024;2.太原广播电视大学,山西 太原 030000)
1 引言
PID控制是最早发展起来的控制策略之一,由于其算法简单、鲁棒性好及可靠性高,被广泛应用于过程控制和运动控制中,尤其适用于可建立精确数学模型的确定性系统。然而实际工业生产过程往往具有非线性、时变不确定性,难以建立精确的数学模型,应用常规PID控制器不能达到理想的控制效果,而且在实际生产现场中,由于受到参数整定方法繁杂的困扰,常规PID控制器参数往往整定不良、性能欠佳,对运行工况的适应性很差。
计算机技术和智能控制理论的发展为复杂、动态、不确定系统的控制提供了新的途径。采用智能控制技术,可设计智能PID控制器和进行PID参数的智能整定。
本设计以电阻炉为控制对象,采用机理分析法对电阻炉加温时的温度对象进行分析,得到电阻炉的数学模型。针对电阻炉实际生产过程对温度控制的要求及其所具有的时滞性、非线性、模型结构不确定等特点,结合模糊控制技术和常规PID控制方法,组成模糊自整定PID控制器。运用MATLAB软件分别用常规PID控制和模糊自整定PID控制对电阻炉温控系统进行仿真实验。通过仿真结果的对比,加深对PID控制及智能PID整定的优越性的理解。
2 系统方案论证
2.1 常规PID控制
PID控制具有结构简单、稳定性能好、可靠性高等优点,尤其适用于可建立精确数学模型的确定性控制系统。在控制理论和技术飞速发展的今天,工业过程控制领域仍有大量回路在应用PID控制策略。PID控制中一个关键的问题便是PID参数的整定,传统的方法是在获取对象数学模型的基础上,根据某一整定原则来确定参数。但是在实际的应用中,许多被控过程机理复杂,具有高度非线性、时变不确定性和纯滞后等特点。在噪声、负载扰动等因素的影响下,过程参数甚至模型结构会随时间和工作环境的变化而变化。在这种情况下,要求PID参数的整定减少对对象数学模型的依赖,并且PID参数能够在线整定,以满足实时控制的要求。
2.2 模糊控制
模糊逻辑控制,简称模糊控制,它以模糊数学、模糊语言形式的知识表示和模糊逻辑规则推理为理论基础,其基本思想是利用计算机来实现人的控制经验,而这些经验多使用语言表达的具有相当模糊性的控制规则。模糊控制器之所以能获得巨大成功,主要是因为:
(1)模糊控制是一种基于规则的控制。它直接采用语言性控制规则,其出发点是现场操作人员的控制经验或相关专家的知识,在设计中不需要建立被控对象的精确数学模型,因而使得控制机理和策略易于接受和理解,设计简单,便于应用。
(2)模糊控制算法是基于启发性的知识及语言决策规则设计的,这有利于模拟人工控制的过程和方法,增强控制系统的适应能力,使之具有一定的智能水平。
(3)模糊控制系统的鲁棒性较强,干扰和参数变化对控制效果的影响被大大减弱,尤其适合于非线性、时变及纯滞后系统的控制。
基于此,将模糊控制与PID控制结合起来得到一种复合控制,即模糊参数自适应PID控制。它是在一般PID控制系统的基础上加上一个模糊控制规则环节构成的。模糊控制单元根据当前的误差e(k)及其变化量ec(k),结合被控过程动态特性的变化,通过模糊规则推理,对 PID控制器的三个参数 KP、KI、KD进行在线调整,从而实现了对PID参数的智能整定,且适用于普遍的工业被控对象。
3 系统建模
本设计所选电阻炉功率为10 W,经过对电阻炉工作原理的分析,采用实验的方法得到其数学模型为:
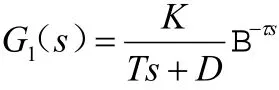
可见,该系统为一阶惯性加滞后的系统。同时实验过程中还发现,当炉温升高时,系统的参数会发生变换。
4 系统设计
4.1 炉温控制的工作原理
温度控制系统的被控对象是电阻炉,被控参数为炉内温度,由热电偶检测炉内实际温度,经过温度变送器转换为0~5 V的电压信号,经计算机采集后与设定温度进行比较,模糊控制器根据设定温度与实际温度的温差及温度的变化率,利用模糊控制算法求出控制输出量。该输出量穿入PID控制器,调整控制参数,控制可控硅调压器的输入,使可控硅的导通角改变。导通角越大,输送到电阻炉两端的交流电压就会愈高,电阻炉的输入功率也就增大,炉温上升;反之,导通角减小,电阻炉输入功率减小,依靠环境自然冷却。炉温偏差为零时,可控硅保持一定的导通角,电阻炉输入一定的功率,使炉温稳定在给定值。
4.2 模糊控制器的设计
参数自适应模糊PID控制器由模糊化、模糊推理和模糊判决3部分构成。模糊控制的关键在于模糊规则的合理性,它决定了对PID参数的调节机理及过程。由工业过程的定性认识出发,比较容易建立语言控制规则,因而模糊控制对那些数学模型难以获取、动态特性不易掌握或变化非常显著的对象非常适用。
自适应模糊PID控制器以误差e和误差变化ec作为输入,可以满足不同时刻的e和ec对PID参数自整定的要求。利用模糊控制规则在线对PID参数进行修改,便构成了自适应模糊PID控制器,其结构见图1。
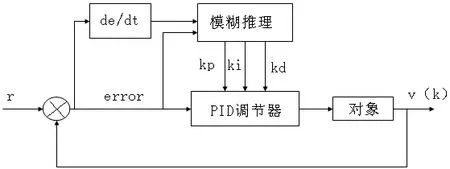
图1 自适应模糊控制器结构
4.3 模糊控制规则
模糊控制规则是根据已知量e、ec求得输出量Δkp、Δki、Δkd的推理规则,采用if-then的条件语句形式,即:If e(k)=Aiand ec(k)=Bithen kp=Ci,ki=Di,kd=Ei。
4.4 模糊推理
以kp为例说明推理过程,ki、kd可类似得到。对模糊规则:If e(k)=Aiand ec(k)=Bithen kp=Ci。
前面强度的求取采取隶属度相乘的形式,即对于某一取值e(k)和 ec(k),分别有 uAi(e(k))和 uBi(ec(k)),故可得到 ui=uAi(e(k))·uBi(ec(k))。然后将 ui赋给后件 kp的隶属度,即令 uCi(xi)=ui,则有 kpi=xi。
4.5 模糊判决
模糊判决采用重心法由 e (k)、ec(k)的隶属度函数形状知,当其某一特定值时,所涉及的控制规则可以为一条、两条或四条,且对于前件强度总有所以反模糊化由下式实现:同理对于ki、kd,分别有
5 MATLAB仿真
5.1 常规PID仿真结果
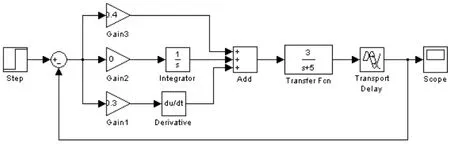
图2 常规PID控制的simlik仿真
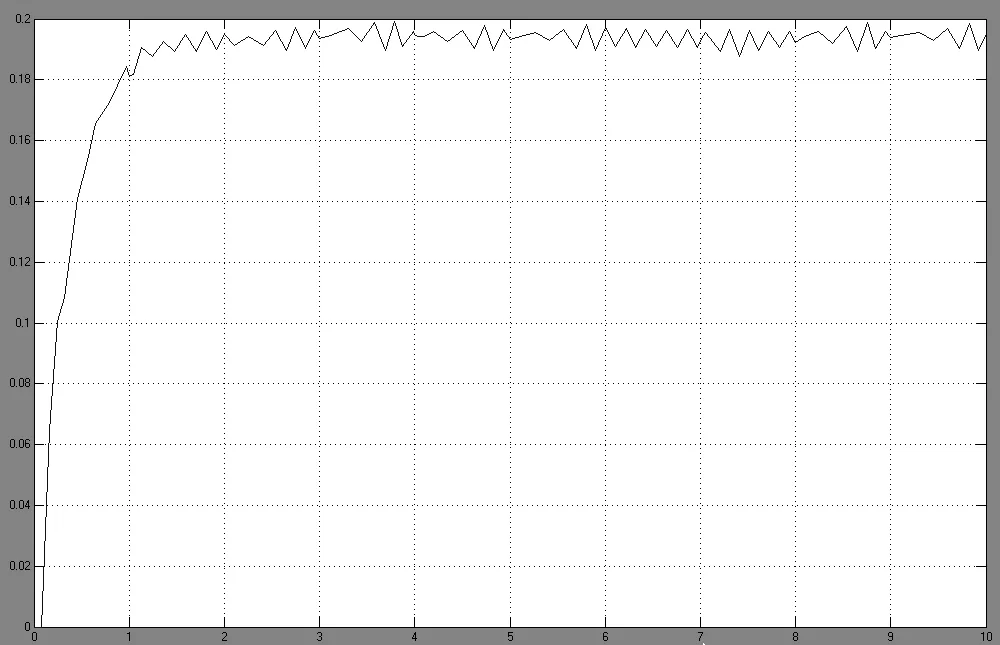
图3 常规PID控制的响应结果
图3 PID三个参数为ki=0、kp=0.41、kd=0.3,该系统为一阶惯性加滞后的系统。同时实验过程中发现,当炉温升高时,系统的参数会发生变换,通过仿真图我们还可以看到,常规PID超调量大,时间延迟长,控制误差很大。
5.2 模糊控制仿真结果
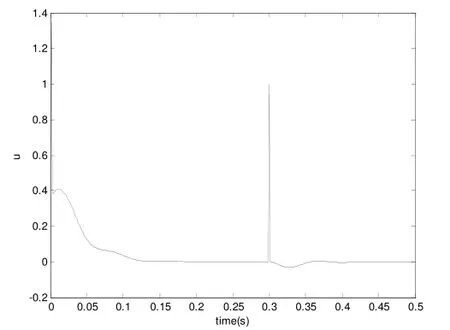
图4 控制器输出u
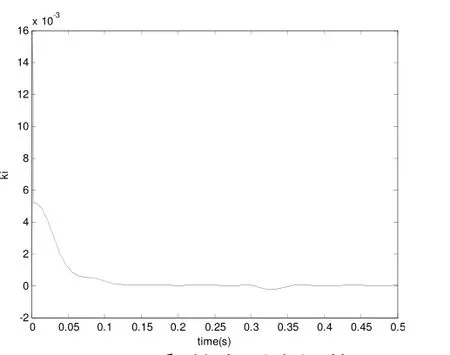
图5 ki的自适应调整
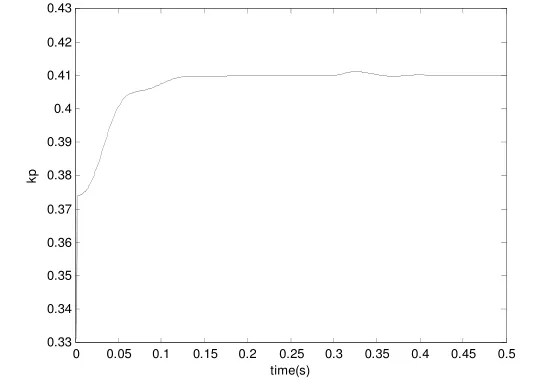
图6 kp的自适应调整
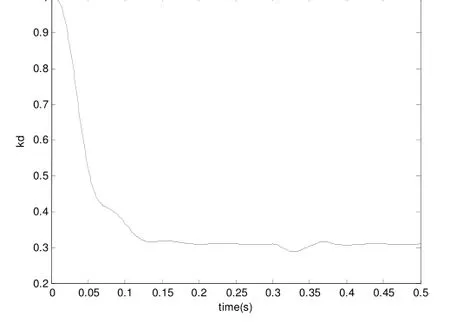
图7 kd的自适应调整
由上述仿真结果可以看出:经过模糊自适应整定后,控制效果良好,稳态误差接近于0,此时,PID三参数分别为:ki=0、kp=0.41、kd=0.3。系统加入模糊控制器后,虽然被控对象发生了参数变化,但由于模糊控制器能够根据系统误差和误差变化率对PID的3个参数(KP、KI、KD)进行在线修正,所以我们所得到的系统动态响应曲线比较好,响应速度较快,超调小甚至无超调,当系统的温度设定值改变时,系统可以很好的跟随,这说明在常规PID控制中引入模糊控制器确实能很好地适应系统的突变要求。
6 总结
此设计是以电阻炉为控制对象,利用MATLAB这一仿真工具,分别以常规PID控制和模糊自整定PID控制对系统进行了仿真,通过对两者的仿真结果进行比较,总结出在电阻炉在外界条件相同条件下,模糊自整定PID控制具有更好的控制效果。
1 李静萍、谢邦昌.多元统计分析方法与应用.北京:中国人民大学出版社,2008
2 王 岩、隋思涟、王爱青.数理统计与MATLAB工程数据分析.北京:清华大学出版社,2006
3 楼顺天.基于 MATLAB的系统分析与设计——模糊系统.西安:西安电子科技大学出版社,2004
4 李国勇.智能控制及其MATLAB实现.北京:电子工业出版社,2005.5
5 张国良、曾 静、柯熙政、邓方林.模糊控制及其MATLAB应用.西安:西安交通大学出版社,2002
6 Richard A Johnson, Dean W Whichern.Applied Multivariate Statistical Analysis.北京:清华大学出版社,2008
7 张化光、孟祥萍.智能控制基础理论及应用.北京:机械工业出版社,2005.2
猜你喜欢
工业加热(2023年11期)2024-01-05 02:13:32
工业加热(2023年3期)2023-05-06 07:29:08
质量安全与检验检测(2022年1期)2022-03-13 08:07:34
上海计量测试(2020年2期)2020-05-12 12:02:04
机电工程技术(2018年10期)2018-12-06 02:26:38
西南交通大学学报(2016年3期)2016-06-15 20:29:35
电子制作(2016年21期)2016-05-17 03:53:01
通信电源技术(2016年5期)2016-03-22 01:09:57
电源技术(2015年11期)2015-08-22 08:50:38