
多载频星载MIMO-SAR系统动目标检测技术研究
2010-03-27 06:55齐维孔禹卫东
电子与信息学报 2010年10期
齐维孔 禹卫东
①(中国科学院电子学研究所 北京 100190)②(中国科学院研究生院 北京 100039)
1 引言
星载合成孔径雷达(Synthetic Aperture Radar,SAR)由于飞行高度高,观测范围广,其地面动目标检测(Ground Moving Target Indication, GMTI)模式无论在军事上还是在民用中都有着及其重要的应用价值。星载多发多收(Multiple Input Multiple Output, MIMO)SAR系统使用多个孔径同时发射波形、多个孔径接收回波,显著增大了地面信息获取能[1,2]。但是由于发射正交编码波形的星载MIMO-SAR系统经过回波分离和距离压缩后,距离模糊较大,对成像质量影响严重,甚至难以成像[3−8]。鉴于此,本文主要研究了多载频星载MIMO-SAR系统动目标检测技术。使用多载频星载MIMO-SAR动目标检测的主要优点有:(1)利用多载频可以有效地解速度模糊,提高动目标速度检测范围;(2)对每个载频的回波信号分别进行剔除平均TM-CFAR检测后,充分利用各载频的检测结果,再使用多次积累CFAR检测器进行动目标检测,提高动目标检测概率;(3)多载频星载MIMO-SAR系统还可以利用子带合成处理实现距离向高分辨率,方位向多通道实现方位向高分辨率,从而在低分辨率实现动目标检测的同时,得到高分辨率的场景图像,并最终将动目标标注在高分辨率的SAR图像上,同时实现动目标检测和高分辨率成像。
在多载频星载MIMO-SAR动目标检测系统中,最核心的两个关键技术是空时自适应处理杂波抑制和恒虚警检测。因此本文针对多载频星载MIMOSAR系统工作模式的特点,在研究多载频星载MIMO-SAR动目标检测系统的基础上,研究了适用于多载频星载MIMO-SAR动目标检测的空频自适应处理算法和双门限CFAR检测器。
2 多载频星载MIMO-SAR系统模型分析
以地面坐标系(X-Y-Z)为参考坐标系,不考虑地球自转,多载频星载MIMO-SAR几何关系示意图如图1所示(为了叙述方面,以3发3收为例进行分析)。

图1 多载频星载MIMO-SAR几何关系示意图
假设星载MIMO-SAR为正侧视工作模式,高度为H,沿X轴方向飞行,飞行速度为υa,距离向为Y轴方向,高度向为Z轴方向。在时间t=0时天线中心经过坐标(0,0,H)处,天线沿飞行方向分割为间距为d的3个子孔径,分别发射波长为λ1,λ2和λ3的线性调频信号,第k个孔径发射信号为

其中τ为快时间,Tp为发射脉冲宽度,fck为第k个孔径发射信号频率,Kr为调频斜率。
地面有一运动点目标,在时间t=0时位于(x0,y0,0)。该动目标径向速度为υy,切向速度为υx(忽略加速度的影响),经过时间t后,该动目标位于P(xt, yt,0)处,忽略二阶以上高次项,第k个发射孔径到目标的距离近似为Rsk(t)。

经过地面反射后,目标到第n个接收孔径的距离近似为Rrn(t)。

根据式(2)和式(3),运动目标回波经带通滤波后,第k个载频对应的基带信号为
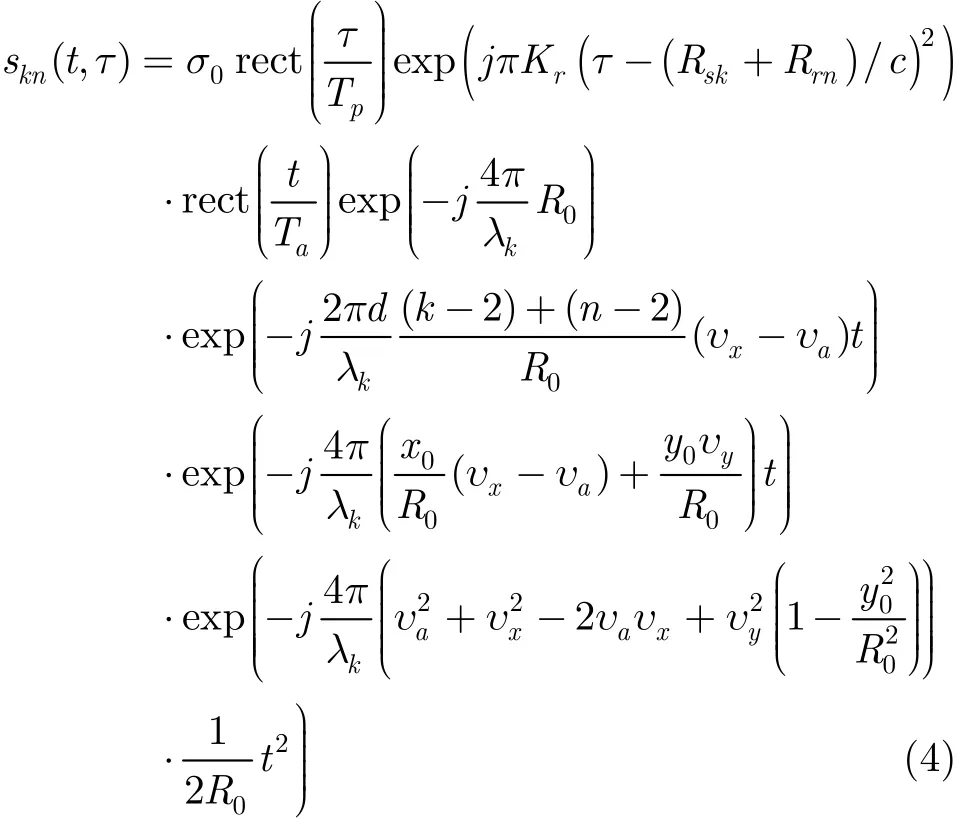
其中k=1,2,3;n=1,2,3。
由式(4)和等效相位中心原理[6],当多载频星载MIMO-SAR系统天线由M个发射孔径和N个接收孔径组成时,回波经过带通滤波器分离后,每个载频对应的回波信号都有N个等效相位中心,如图2所示。
图2中,M发N收的多载频星载MIMO-SAR系统,可以等效为M个1发N收的星载SIMO-SAR系统,只是每个系统发射信号频率有所不同,因此对多载频星载MIMO-SAR系统的处理可以借用传统星载SIMO-SAR系统处理方式,同时结合其自身优势,获取更多信息。本文所研究的多载频星载MIMO-SAR动目标检测处理框图如图3所示。
图3中,处理框图主要由以下几部分组成:接收机前端处理、分离相位中心信号、各等效相位中心预处理、SFAP算法杂波抑制和双门限CFAR检测器。
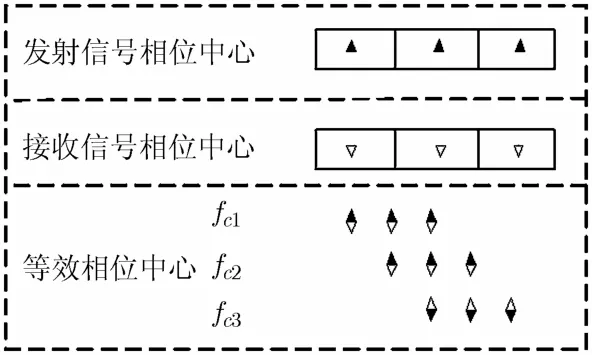
图2 多载频星载MIMO-SAR系统等效相位中心
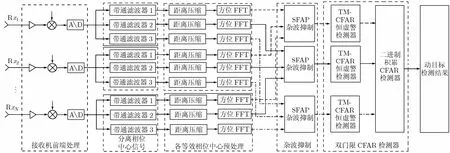
图3 多载频星载MIMO-SAR动目标检测处理框图
3 空频自适应处理抑制杂波
随着STAP理论和SAR技术的发展,STAP技术不断被应用到SAR动目标检测中,从公开发表的文献[9-14]来看,STAP技术已成功应用于机载SAR,并取得了较好的动目标检测性能。比如德国FGAN多通道SAR试验系统“AER-II”以及PAMIR-SAR雷达系统,均采用STAP技术抑制杂波,表明STAP技术与SAR的结合能够实用化[9−14]。空频自适应处理(SFAP)技术是STAP技术的频域形式,对多通道的星载SAR系统是一种比较理想抑制杂波技术。多通道星载SAR利用SFAP技术抑制杂波,完成动目标检测处理的流程图如图4所示。
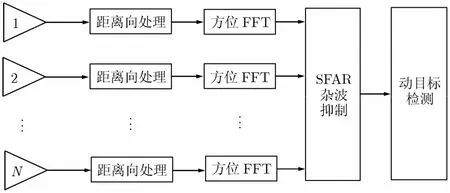
图4 多通道星载SAR系统动目标检测处理流程图
图4中,首先将N个通道的回波信号进行距离向处理,包括距离压缩和距离徙动校正等,再方位FFT变换到距离多普勒域,最后使用SFAP算法抑制杂波。
STAP算法具有将杂波电平抑制到噪声电平的优点。对谱密度矩阵进行特征值分解,有一个比较大的特征值,该特征值与其他特征值和的差别决定了杂波抑制的性能,差别越大,杂波抑制效果越明显;反之,杂波抑制效果差。根据第5节的仿真参数,使用基于子空间投影的SFAP算法时,谱密度矩阵特征值随多普勒频率的分布如图5所示。
由图5中特征值随多普勒频率的变化曲线,可知在地面杂波所占据的多普勒频率范围内,谱密度协方差矩阵的最大特征值对应杂波信号,其他两个较小的特征值对应噪声加动目标信号。杂波抑制性能可以通过比较最大特征值与其余特征值之和的比值来估计。在多普勒带宽内,杂波抑制性能基本保持在16 dB左右,而在多普勒带宽外,杂波抑制性能有所下降,因为在该部分,杂波能量很小。

图5 估计的谱密度矩阵特征值随多普勒频率的分布
4 双门限CFAR检测器
此处的双门限检测实质是单门限CFAR检测器的级联,其主要思想是各载频对应的回波信号通过SFAP杂波抑制后,使用剔除平均(TM)CFAR检测动目标,得到各载频对应的检测结果,将检测结果使用二进制多次脉冲积累进行二次CFAR检测,进一步提高检测概率,降低虚警概率。基于TM-CFAR检测的双门限CFAR检测器处理框图如图6所示。
图6中,以3发3收的多载频星载MIMO-SAR系统为例,3个发射通道发射不同载频的信号,接收信号经过回波分离,得到不同载频对应的回波信号。将各回波信号进行杂波抑制,对杂波抑制后的数据首先使用TM-CFAR检测器检测动目标,检测结果分别为
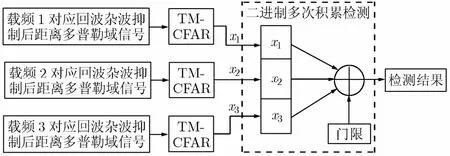
图6 基于TM-CFAR检测的双门限CFAR检测器处理框图

xi(n)=1表示在第n个距离门处有动目标存在,xi(n)=0表示在第n个距离门处无动目标存在。对前级TM-CFAR检测器的检测结果使用二进制多次积累检测器进行多次脉冲积累检测。有关TMCFAR检测器的实现框图可参考文献[15]。
对于滑窗式二进制多次积累CFAR检测器, 其处理框图如下图7所示。

图7 滑窗式二进制多次积累CFAR检测器处理框图
前级TM-CFAR的检测结果,输入到长度为L的延迟线,作滑窗式二进制多次积累,得到最终检测结果。当滑窗的长度为L,检测门限为K时,只有L次脉冲积累中目标出现次数大于或等于K时,才能判决目标存在。假设前级TM-CFAR虚警概率为Pfa,检测概率为Pd,那么多次积累CFAR检测器的检测概率PD和虚警概率PFA分别为

式(6)和式(7)表明,多次积累检测器的检测性能只与Pfa,Pd,K和L有关,在Pfa,Pd和滑窗长度L一定的情况下,从给定的虚警概率PFA,就可以由式(7)确定检测门限K。根据检测门限K,由式(6)即可计算出最终的检测概率PD。图8为3发3收多载频星载MIMO-SAR系统使用双门限CFAR检测器性能与星载SIMO-SAR系统使用单门限TM-CFAR检测器性能的比较,其中TM-CFAR检测器的参考单元均为32,剔除最大值个数为2,剔除最小值个数为2,多次积累检测器的滑窗长度为3,检测门限为2,虚警概率均要求−610。
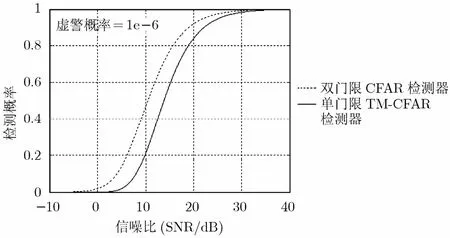
图8 单门限TM-CFAR检测器和双门限CFAR检测器检测概率随信噪比变化曲线
图8中可见,在信噪比SNR较低(小于0 dB左右)和较高(大于35 dB左右)时,双门限CFAR检测器和TM-CFAR检测器性能接近,主要是因为SNR较低时,检测概率均接近于0;而SNR较高时,检测概率均接近于1。但是当信噪比在[0,35] dB之间时,双门限CFAR的检测概率要高于TM-CFAR。SNR=15 dB时,双门限检测概率为0.78,单门限检测概率为0.58,可见在相同的SNR下,双门限检测器的检测概率明显提高。当达到相同的检测概率PD=0.8时,双门限检测器需要的最小信噪比为15.68 dB,单门限检测器需要的最小信噪比为18.92 dB,可见相比单门限检测器,双门限检测器更有利于对弱目标的检测。
5 杂波抑制仿真结果与分析
5.1 仿真参数
假设系统为3发3收MIMO-SAR,发射线性调频信号,仿真参数如表1所示。假设信杂比SCR=5 dB,杂噪比CNR=10 dB,地面上不同位置处有3个动目标,动目标位置参数和速度参数如表2所示。地面杂波分布如图9,由于SCR比较低,目标被掩盖在杂波中。
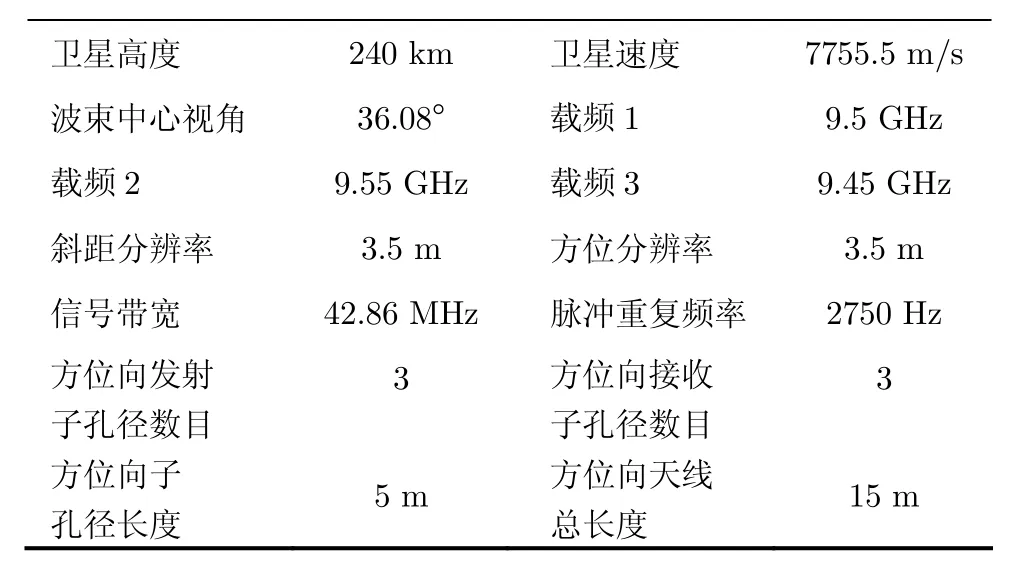
表1 仿真参数

表2 动目标位置参数

图9 地面杂波分布
5.2 杂波抑制结果
取出载频9.5 GHz所对应的3通道信号,对包含地面杂波和动目标的回波信号,进行距离压缩和距离徙动校正,变换到距离多普勒域,然后使用基于子空间投影SFAP算法抑制杂波。杂波抑制前和杂波抑制后的距离-多普勒域信号如图10所示。
图10(a)中,杂波抑制前距离-多普勒域信号分布在整个平面,难以判断出动目标信号所在位置。但是杂波抑制后,图10(b)中信号在某些距离门处有明显较大值。为了更加有效检测动目标,对每个距离门沿多普勒频谱求和,得到的1维图如图11所示。
图11中可以清楚地看出杂波抑制前,动目标信号频谱被掩盖在杂波中,难以检测出动目标所在距离向位置;杂波抑制后,动目标所在距离位置出现峰值,此时就能有效地检测出动目标所在距离位置。杂波抑制后,如果使用静止目标参考函数对其进行方位压缩,得到成像结果如图12所示。图12中,动目标所在距离向位置基本正确,但是由于目标存在径向速度,导致方位向位置偏移;由于存在切向速度,导致目标没有完全聚焦,出现散焦。
为了对动目标参数估计和定位,对动目标所在距离门信号做频谱分析,取出杂波抑制后动目标所在距离门信号,这里以距离向位置为0m处的信号为例。由仿真参数可知,在该距离门处有1个动目标信号,对杂波使用修正的离散Chirp-Fourier变换(Modified Discrete Chirp-Fourier Transform,MDCFT)做时频分析[16],得到图13的时频信号。
由图13可见,有一个明显的峰值点,根据峰值点位置估计出运动目标多普勒中心频率和多普勒调频斜率分别为-292.52 Hz和-11331 Hz/s,进而估计动目标参数。对杂波抑制后的信号,每个距离单元均使用MDCFT做时频分析,估计出每条距离线上的多普勒中心频率和多普勒调频斜率,然后使用相对应的方位向匹配函数进行方位压缩,得到动目标聚焦后的信号如图14。3个动目标信号均较好地聚焦在真实位置,但是由于MDCFT对多普勒调频斜率的估计误差,以及剩余杂波和噪声的影响,动目标信号存在一定程度的散焦。
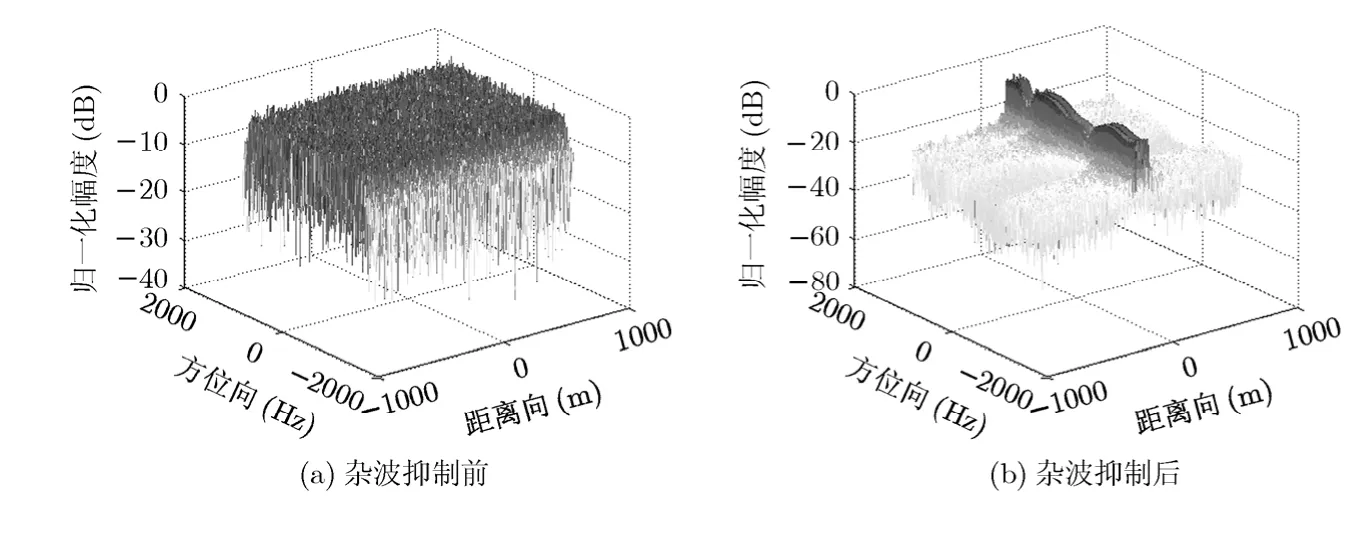
图10 杂波抑制前和杂波抑制后距离-多普勒域信号比较图
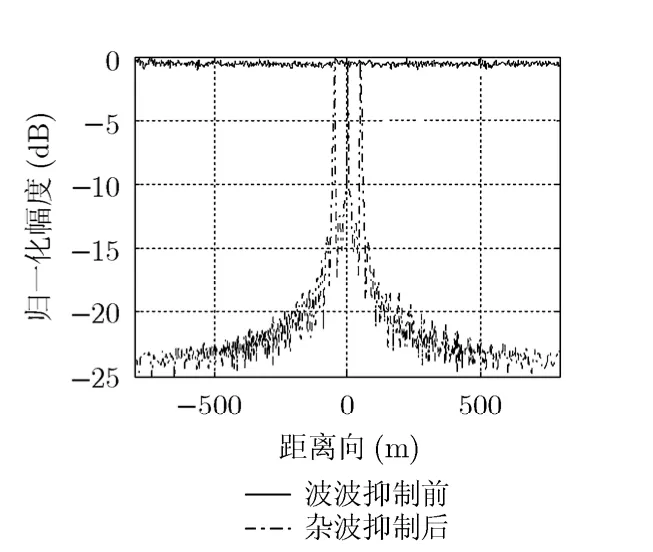
图11 沿多普勒频谱求和比较图

图12 使用静止目标参考函数压缩结果
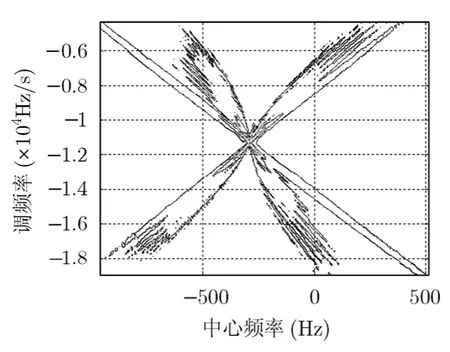
图13 杂波抑制后距离向位置为0 m处MDCFT时频分析

图14 动目标信号聚焦结果
6 结束语
本文针对多载频星载MIMO-SAR系统所具有的特点,研究了多载频星载MIMO-SAR动目标检测技术,对其中的关键技术STAP杂波抑制和CFAR检测器进行了研究。主要使用子空间投影的空频自适应处理抑制杂波,并提出一种双门限恒虚警检测器,即由TM-CFAR检测器和多次积累CFAR检测器级联组成,对杂波抑制后的信号进行动目标检测。同时本文进行了分布目标场景仿真试验,场景中的动目标能较好地被检测出并聚焦在真实位置。本文的研究对星载MIMO-SAR的总体设计和动目标检测模式设计提供了一定的参考价值。
[1] Wang W Q. Application of MIMO technique for aerospace remote sensing [C]. Aerospace Conference, Big Sky, Montana,2007, 3(10): 1-10.
[2] Wang W Q, Peng Q C, and Cai J Y. Novel MIMO SAR for urban remote sensing applications [C]. The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Beijing, China, 2008, Vol.XXXVII: 139-144.
[3] 戴喜增. MIMO雷达分集检测和宽带合成的理论与方法研究[D]. [博士论文], 清华大学, 2008.
[4] 井伟, 武其松, 刑孟道, 保铮. 多子带并发的MIMO-SAR高分辨大测绘带成像[J] . 系统仿真学报, 2008, 20(16):4373-4378.Jing W, Wu Q S, Xing M D, and Bao Z. Image formation of ide-swath high resolution MIMO-SAR. Journal of System Simulation, 2008, 20(16): 4373-4378.
[5] 武其松, 井伟, 刑孟道, 保铮. MIMO-SAR大测绘带成像[J] .电子与信息学报, 2009, 31(4): 772-775.Wu Q S, Jing W, Xing M D, and Bao Z. Wide swath imaging with MIMO-SAR. Journal of Electronics & Information Technology, 2009, 31(4): 772-775.
[6] 宋岳鹏. 多收发孔径合成孔径雷达系统技术研究[D]. [博士论文], 中国科学院电子学研究所, 2008.
[7] Gong M, Wang X M, and Huang S J. Performance improvements in MIMO-SAR [C]. Radar Conference 2008,Rome, 2008: 1-3.
[8] Krieger G, Gebert N, and Moreira N. Multidimensional waveform encoding: a new digital beamforming technique for synthetic aperture radar remote sensing[J]. IEEE Transactions on Geoscience and Remote Sensing, 2008, 46 (1):31-46.
[9] Ender J H G and Brenner A R. PAMIR:A wideband phased array SAR MTI system[J]. IEE Proceeding-F Radar, Sonar and Navigation, 2003, 150(3): 162-172.
[10] Ender J H G, Berens P, and Brenner A R, et al.. Multi channel SAR/MTI system development at FGAN: from AER to Pamir [C]. International Geoscience and Remote Sensing Symposium, Toronto, Canada, 2002, 3: 1697-1701.
[11] Klemm R. Introduction to space-time adaptive processing [J].Electronics & Communication Engineering Journal, 1999,11(1): 5-12.
[12] Ender J H G. Space-time adaptive processing for synthetic aperture radar [C]. IEE Colloquium, London, 1998: 611-618.[13] Reed I S, Mallet J D, and Brennan L E. Rapid Convergence Rates in Adaptive Arrays [J]. IEEE Transactions on Aerospace Electronic Systems, 1974, 10(6): 853-863.
[14] Klemm R. Interrelated problems in space-time adaptive processing for SAR and ISAR [J]. IEE Proceeding-F Radar,Sonar and Navigation, 1998, 145(5): 297-302.
[15] Gandhi P P and Kassam S A. Analysis of CFAR processors in non-homogeneous backgrounds [J]. IEEE Transactions on Aerospace Electronic Systems, 1998, 24(4): 427-445.
[16] 黄瑶. 机载SAR地面运动目标检测成像技术研究. [博士论文],中国科学院电子学研究所, 2007.
猜你喜欢
汽车实用技术(2022年4期)2022-03-07
科学与信息化(2021年30期)2021-12-24
华东师范大学学报(自然科学版)(2020年1期)2020-03-16
火力与指挥控制(2019年4期)2019-06-14
火力与指挥控制(2018年10期)2018-11-13
中国交通信息化(2017年9期)2017-06-06
电子制作(2017年10期)2017-04-18
工业设计(2016年11期)2016-04-16
西北工业大学学报(2015年3期)2015-12-14
湖湘论坛(2015年3期)2015-12-01
