具有力/位感知的仿人假手拇指机构
2010-03-24 06:10王新庆刘伊威
哈尔滨工业大学学报 2010年9期
王 伟,姜 力,王新庆,刘伊威,刘 宏,2
(1.哈尔滨工业大学,机器人技术与系统国家重点实验室,哈尔滨150086,kingwei82@163.com; 2.德国宇航中心,机器人及机电一体化研究所,慕尼黑82230)
近年来,国内外对假手的研究都取得了一定成果,如意大利的RTR I[1-2]和RTRⅡ假手[3],美国的IOWA-Hand[4]和Standford-Hand[5],加拿大的TBM-Hand[6],西班牙的MANUS-Hand[7],哈工大的HIT-DLR手[8-9]等.现有大部分假手的传感系统不够完善,限制了假手的应用,基于欠驱动原理设计的上一代HIT/DLR假手,虽然其拇指包络性较好,但由于其需要储能元件(扭簧),决定了拇指的尺寸比较大,且实验表明,由于储能元件的存在,拇指在运动的起点和终点会发生震动,这些都限制了欠驱动技术在假手中的应用.
本文在上一代假手的基础上研制了一种基于耦合原理和空间四杆的具有力矩和位置感知的仿人拇指.该拇指能够感知手指的绝对位置和指尖出力.采用了耦合驱动,使得尺寸小于成人拇指,抓取速度快且在运动的起点和终点没有震动.
1 仿人拇指的结构设计
人手拇指有3个指节组成,即近指节、中指节和远指节(指尖).近指节被肌肉包裹,在手掌一侧,故拇指一般只露出后2个指节,但近指节在抓握物体时参与运动.另外,拇指在抓握运动时,通常是沿一锥面,即伸展/弯曲,外展/内收两个自由度的结合,而不是做单一方向的运动.
本文设计的仿人假手拇指具有3个指节,考虑到假手外观及佩戴手套需要,每个指节的尺寸均略小于成人拇指.电机经减速箱和伞齿轮减速装置减速增矩后驱动近指节运动,中指节与近指节之间、远指节与中指节之间均采用耦合驱动方式.为模仿人手拇指的运动特点,远指节与中指节之间为平面耦合驱动,中指节与近指节之间采用了一平面四杆和一空间四杆结合的空间耦合驱动方式,原理如图1(a)和图1(b)所示.

图1 拇指近指节连杆机机构简图
其中:l1为拇指基座,l2为近指节侧板,l6为中指节轴盘,s1,s2为球铰.近指节侧板l2的运动推动连杆轴l3的运动,连杆轴通过球铰连杆l5推动中指节轴盘运动,从而实现与中指节轴盘l6连在一起的中指节运动.对于图1(b)所示的双球铰四杆机构,由空间自由度计算公式可得该机构的自由度F=2.
可见双球铰之间会引入一局部自由度,为消除此自由度,其中球铰s2使用两个转动副轴线垂直的球连杆代替,如图1(c).这样,球铰s2的3个转动自由度转变为两个转动自由度.新一代假手与上一代假手比较见图2(a),可以看出,新一代假手的拇指比上一代假手尺寸更小,外观更加仿人化.拇指的结构图见图2(b).
2 仿人假手拇指近指节连杆机构运动学分析
如图2(b)所示,近指节侧板、基座、近指节连杆与连杆轴组成一平面四连杆机构,近指节侧板、连杆轴、球铰套、球连杆与中关节轴盘组成一空间四杆机构.球铰中心点B是此平面四杆机构和空间四杆机构的公共点,通过对这两个机构分别进行分析,推出B点的坐标值,建立方程,进行运动学计算.
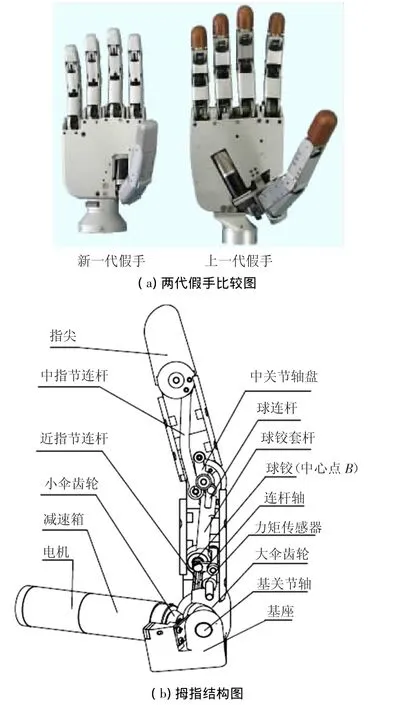
图2 两代假手比较及拇指结构图
2.1 拇指近指节平面四杆运动学分析
为空间四杆计算方便,坐标原点O0设置在通过球铰中心B且垂直于基关节轴的平面与基关节轴的交点处,z0轴与基关节轴重合,x0轴垂直于基关节转动轴线与中关节转动轴线所形成的平面,y0由右手定则确定.建立的坐标系如图3(a)所示.
对于△OAC,有

对于△ABC,有

对于该拇指机构β2<90°,可得

图3 平面四杆运动学分析和空间四杆的连杆坐标系

同理可得

其中,β=β1+β2.
其中,θ1为输入角.
则球铰中心B点的坐标

2.2 拇指近指节空间四连杆运动学分析
对拇指空间四杆机构建立坐标系如图3(b)所示,O0坐标系与平面四杆坐标系重合,连杆的Denavit-Hartenberg参数如表1所示.
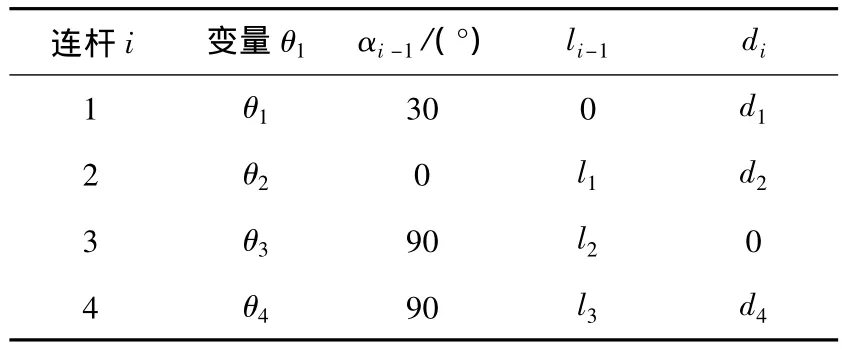
表1 连杆的Denavit-Hartenberg参数表
在这里,0≤θ1≤45°,0≤θ2<180°,0≤θ3<90°,0≤θ4<90°.
相邻连杆坐标系之间的齐次变换矩阵是:

其中:si=sin θi,ci=cos θi.
则空间四杆的坐标变换矩阵

可得B点的坐标:

其中:cij=cicj-sisj,sij=cisj+sicj,d5为坐标原点O4到B点沿z4轴的距离.
为模仿人手拇指的运动,取中关节转动角与基关节转动角θ2∶θ1=0.9∶1.0.根据人手拇指近指节的尺寸,可以确定l2,l3和di的值,则由(1)(2)联立,并注意到θi的变化范围即可求得中关节轴盘l1的值.
图4(a)为通过Matlab得出的拇指中关节与基关节转动角度关系曲线.图4(b)为通过ADAMS仿真得到的拇指各关节转角与时间关系曲线.

图4 中关节与基关节转动角度关系曲线和拇指各关节转角与时间关系曲线
3 仿人假手力矩和位置传感装置设计
3.1 力矩传感装置设计
设计了基于应变片的一维力矩传感器,安装在手指的基关节上,用来测量手指的抓取力矩.传感器和电机驱动部分相连,把电机的扭矩传递给各个手指.基关节力矩传感器的弹性体作为一个机械部件连接在基关节轴和驱动连杆之间,由ANSYS对其进行受力分析,找出其应变最大处,贴应变片.它反映了抓取过程中近指节、中指节和远指节与物体接触的时间和力的大小.
根据各弹性体在手指中的实际受力情况,要求弹性体在电机额定力矩的驱动下,中间应变为1×10-3mm/mm左右,以此来确定弹性体的基本结构.对力矩传感器进行了静态标定实验,由标定所得数据可知,在力矩传感器末端加负载50 N时,力矩传感器的应变为0.74×10-3mm/mm.通过ANSYS分析,力矩传感器末端加负载50 N时,平均应变为0.81×10-3mm/mm,说明力矩传感器实验与理论相符.
3.2 位置传感装置设计
根据霍尔效应原理,将磁钢固定在减速箱输出轴上的转盘边沿,转轴转动时,转盘随转轴旋转,磁钢也将跟着同步旋转,磁钢所产生的磁场也将随着变化,安装在转盘上方的霍尔器件,受磁钢所产生的磁场的影响,将产生与位置变化相关的正余弦电压信号.根据霍尔器件产生的电压值可以计算出转轴的绝对位置.图5为手指在伸展/弯曲时位置传感器输出信号.该位置传感器能够测得0°~360°的绝对位置,转轴的转动范围为108°,设计的位置传感器能够满足需要.

图5 手指在伸展/弯曲时位置感器信号图
4 仿人假手的控制系统设计和抓取实验
假手的控制系统采用主、从双DSP分布式控制结构,由驱动和传感系统和上层主控制系统组成.
如图6所示,主控制系统中的DSP2作为主控制器置于手臂筒内,以减少手掌的体积,它负责整个电气系统的处理与决策.DSP2将处理完的肌电(EMG)信号转换为电机动作指令后,通过CAN总线把命令发给驱动和传感系统控制器的DSP1.
驱动和传感系统采用DSP加CPLD的基本设计思路.根据就近原则DSP1与CPLD置于手掌内,电机编码器把信号返还给CPLD进行处理,获得手指的速度信息并发给DSP1.在功能上,实现力矩传感器、位置传感器信号的计算,从而获知手指的力矩和绝对位置信息.驱动和传感系统由自己的系统电源转换模块为DSP供电,但和主控制系统共用一对电池.此部分通过CAN总线通讯,接受DSP2主控制系统的指令,并根据相应的指令驱动电机工作,另外它还可以通过DSP1的SCI口经由MAX3221转为RS232串口与PC机进行通信.
人手抓握物体一般包括精确抓取、力量抓取、捏拿等抓握方式,在抓取物体时,拇指起到了很重要的作用,没有拇指施加力,其他手指只能完成很小直径的柱状物体的抓握.图7为假手分别进行抓取U盘(手指正向捏取)、抓取乒乓球(三指捏取)、抓取水瓶(柱状抓握)和握拳图.实验证明,假手能够完成人手大部分抓取功能,且运动速度快,抓取力大且稳定,运动轨迹仿人化,能够满足残疾人基本生活需要.

图6 假手的控制系统

图7 假手抓取实验和假手握拳图
5 结语
1)基于耦合驱动原理对拇指机构进行了设计和实验,并集成了力矩和位置感知功能.
2)拇指的特点是:能够感知拇指的绝对位置和指尖出力,运动速度快且在运动的起点和终点没有震动,尺寸略小于正常人的拇指,运动轨迹仿人化,能够满足残疾人基本生活需要.
3)与上一代假手相比,手指的出力更大,运动更稳定,抓取速度更快.
[1]CARROZZA M C,MASSA B,MICERA S,et al.The development of a novel biomechatronic hand——ongoing research and preliminary results[J].IEEE/ASME Transactions on Mechatronics,2002,7(2):108-114.
[2]CARROZZA M C,MASSA B,DARIO P,et al.A two DOF finger for a biomechatronic artificial hand[J].Journal Technology and Health Care,2002,10(2):77-89.
[3]MASSA B,ROSELLA S,CARRIZOZO M C,et al.Design and Development of an Underactuated Prosthetic Hand[C]//Proceedings of the 2002 IEEE International Conference on Robotics and Automation.Washington DC:[s.n.],2002:28-36.
[4]YANG Jingzhou,PITARCH E P,ABDEL-MALEK K,et al.A Multi-Fingered Hand Prosthesis[J].Mechanism and machine theory,2004,39:555-581.
[5]DOSHI R,YEHC C.The design and development of a gloveless endoskeletal prosthetic hand[J].Journal of Rehabilitation Research and Development,1998,35 (4):388-395.
[6]DECHEV N,NAUMANN S.Multiple Finger,Passive adaptive grasp prosthetic hand[J].Mechanism and Machine theory,2004,36:1157-1173.
[7]PONS J L,ROCON E,CERES R.The MANUS-HAND dextrous robotics upper limb prosthesis:Mechanical and manipulation aspects[J].Autonomous Robots,2004,16:143-163.
[8]HUANG Hai,JIANG Li,ZHAO Da-wei,et al.The Development on a New Biomechatronic Prosthetic Hand Based on Under-actuated Mechanism[C]//IEEE/RSJ International Conference on Intelligent Robots and Systems.Beijing,China:IEEE,2006:3791-3796.
[9]HUANG Hai,JIANG Li,LIU Yi-wei,et al.The Mechanical Design and Experiments of HIT/DLR Prosthetic Hand[C]//2006 IEEE International Conference on ROBOTICS and BIOMIMETICS.Kunming,China:IEEE,2006:896-901.
猜你喜欢
网络安全技术与应用(2022年5期)2022-07-26
公民与法治(2020年4期)2020-05-30
林业工程学报(2020年2期)2020-04-08
传感器与微系统(2018年7期)2018-08-29
中国设备工程(2017年11期)2017-06-29
文理导航·科普童话(2017年1期)2017-05-31
现代制造技术与装备(2016年12期)2016-04-06
创造(2016年5期)2016-02-01
智能系统学报(2015年4期)2015-12-27
实用手外科杂志(2015年2期)2015-08-28